郑州网站app建设邢台招聘网
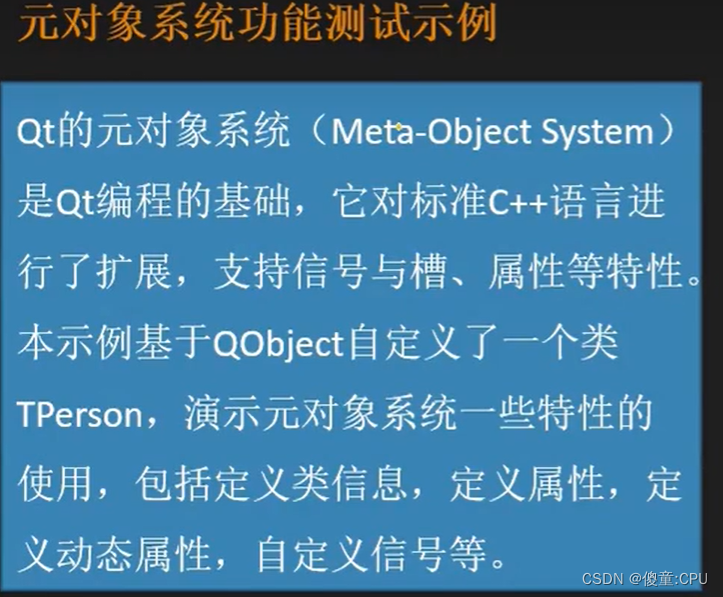
元对象系统功能
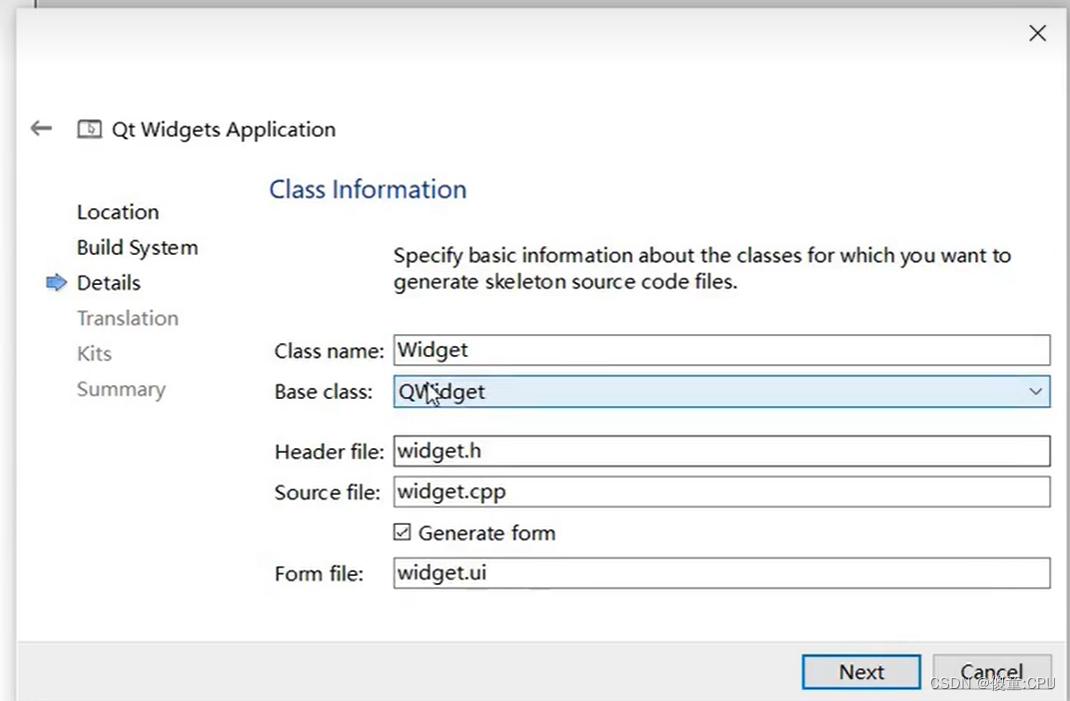
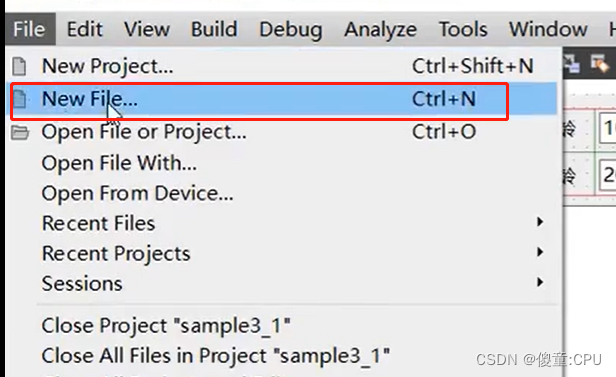
建立工程
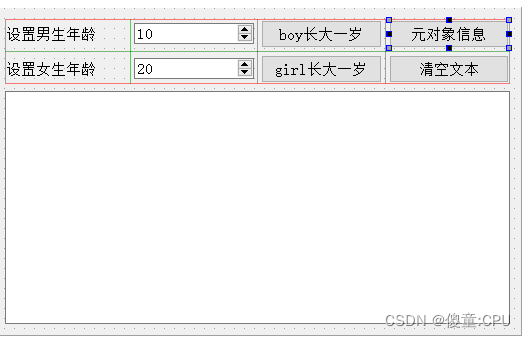
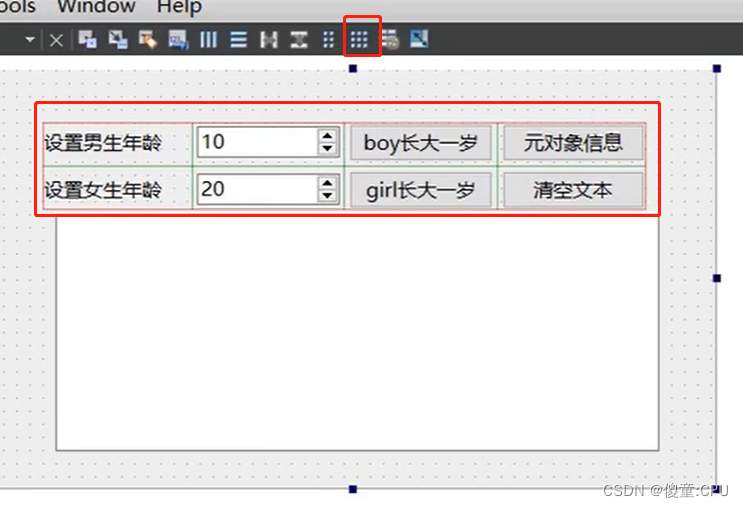
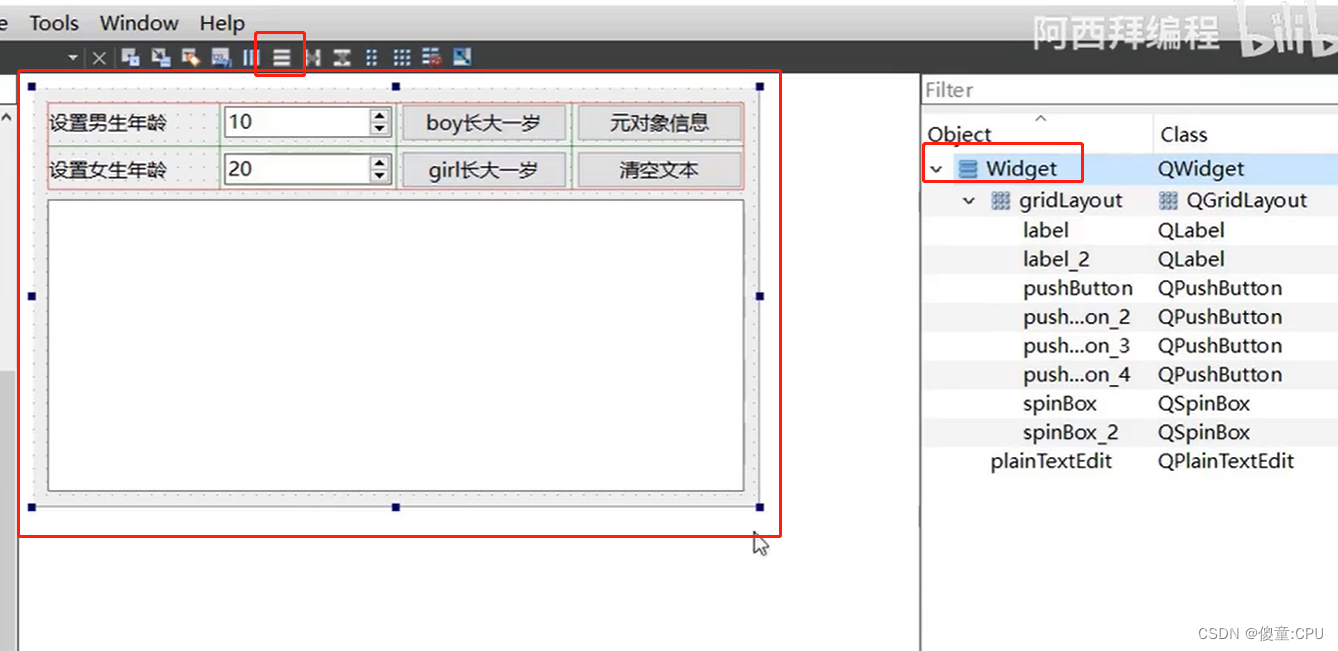
布局页面
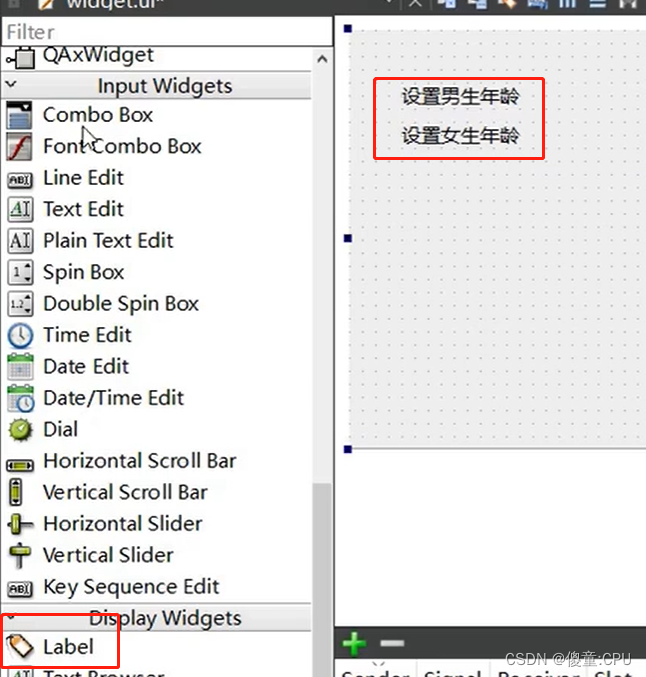
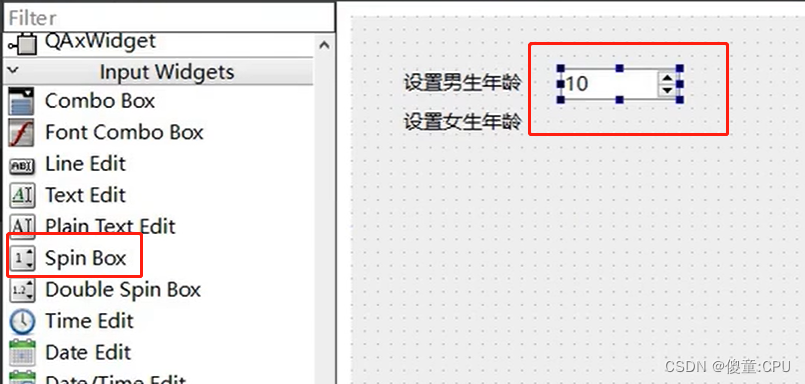
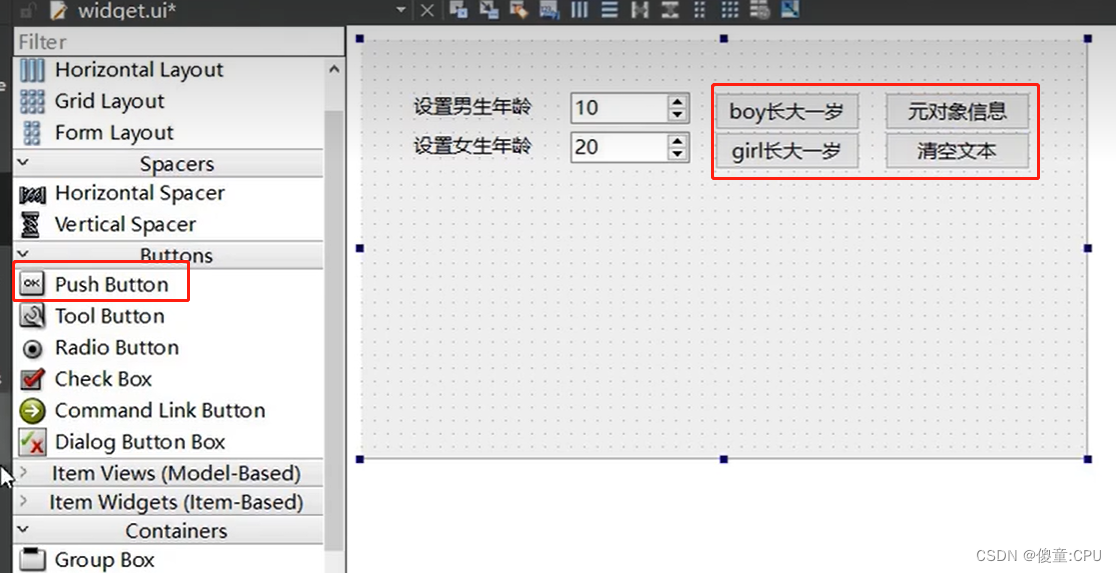
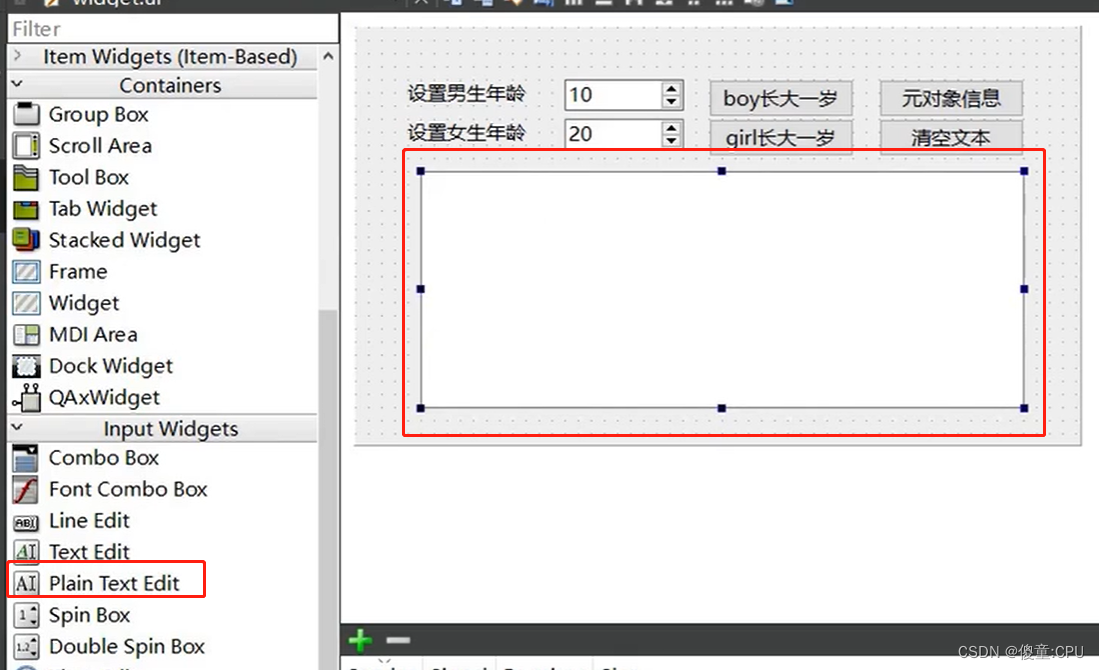
布局页面
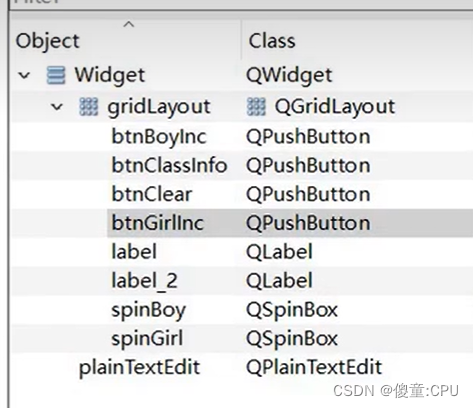
修改原件名称
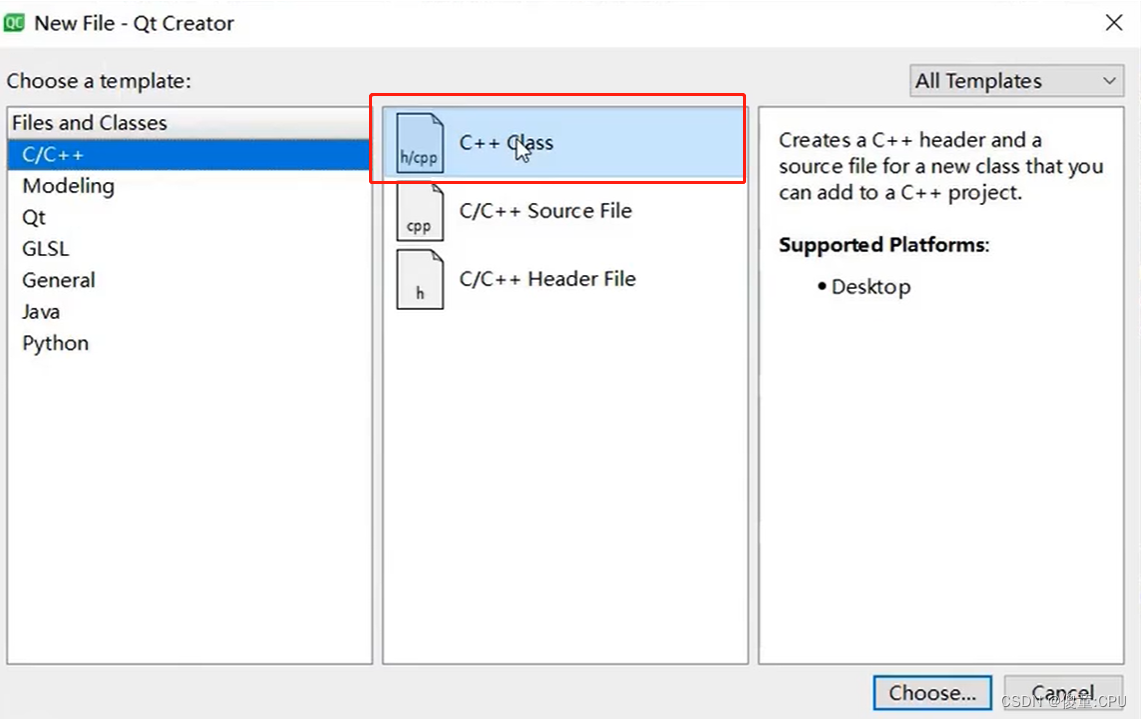
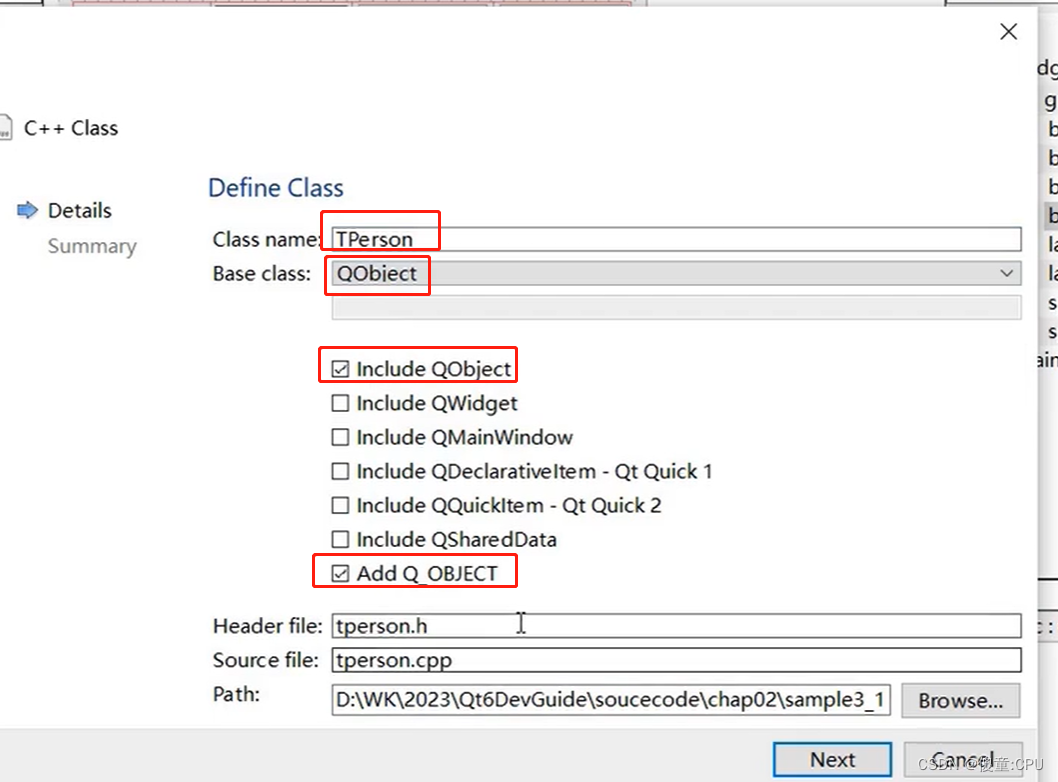
建立元对象
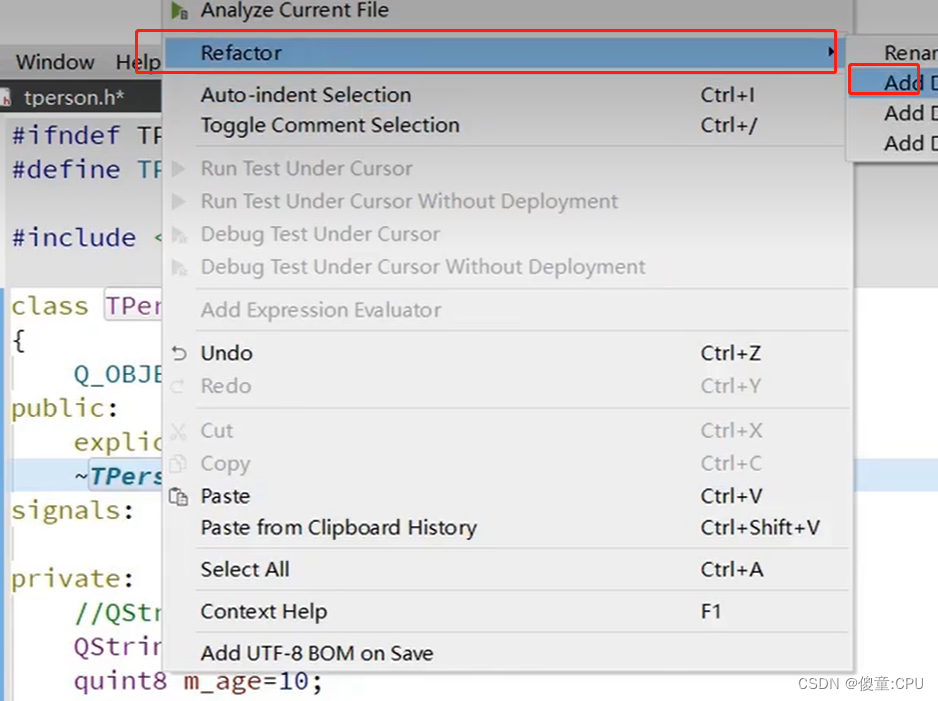
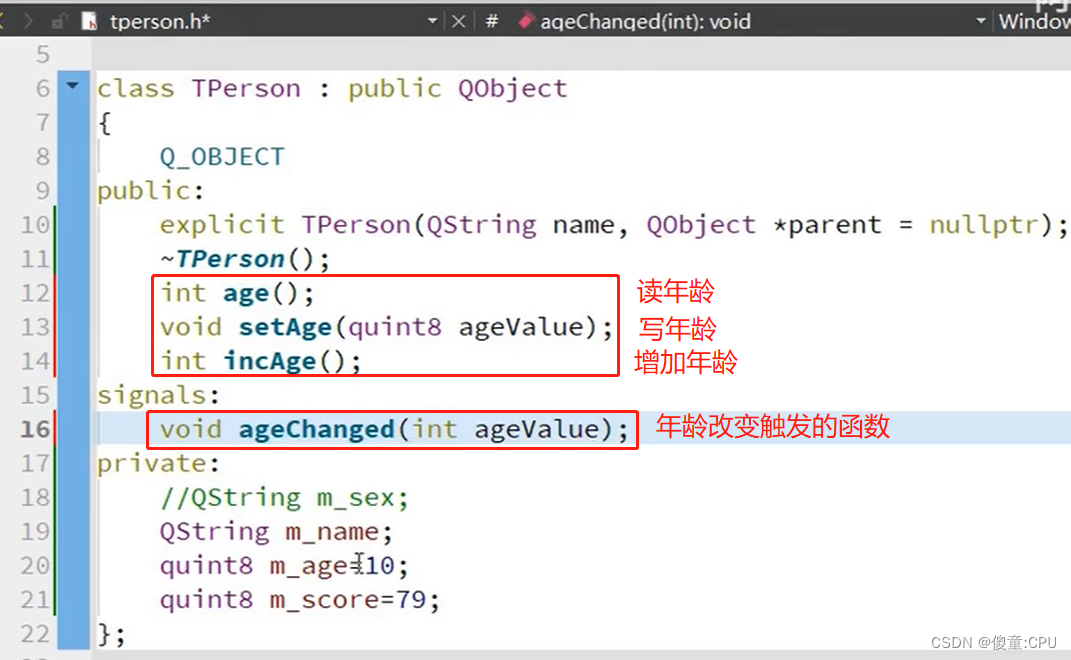
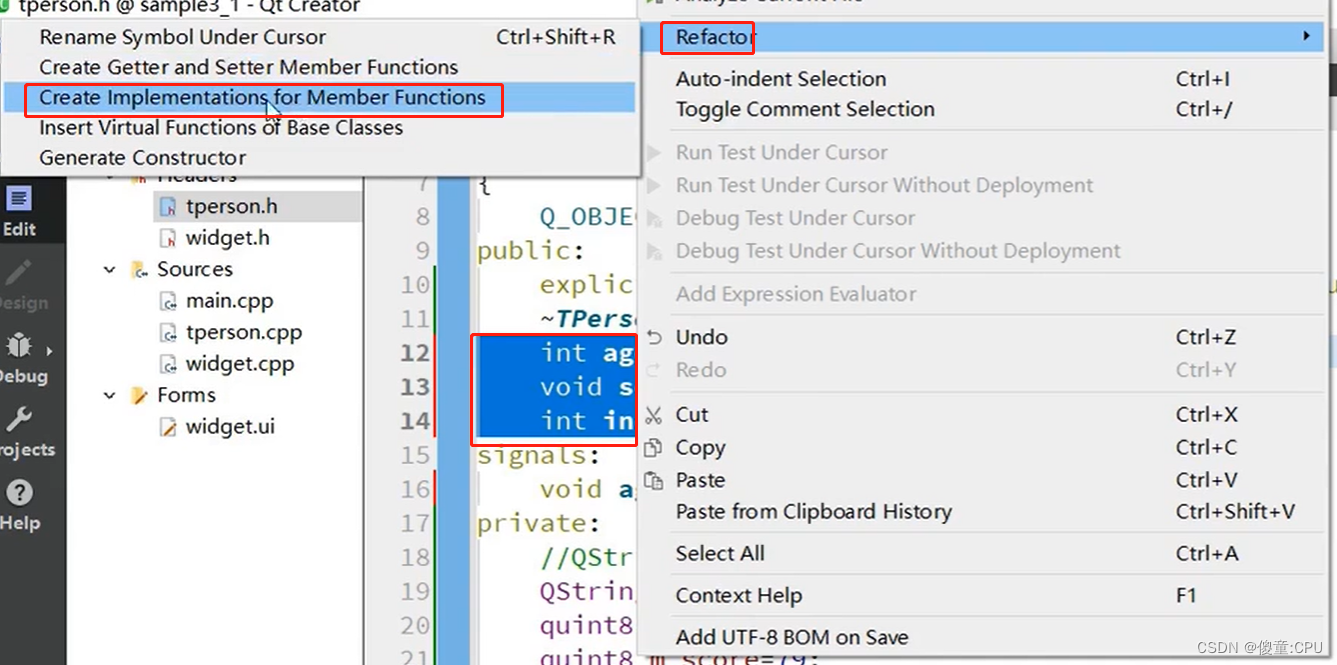
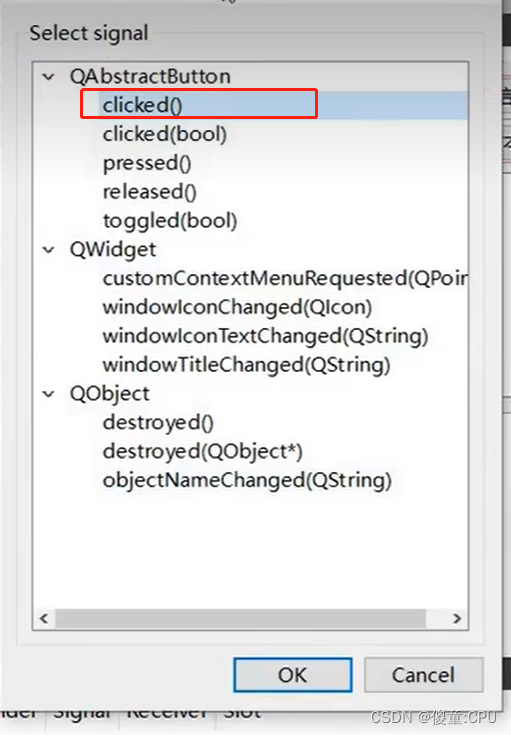
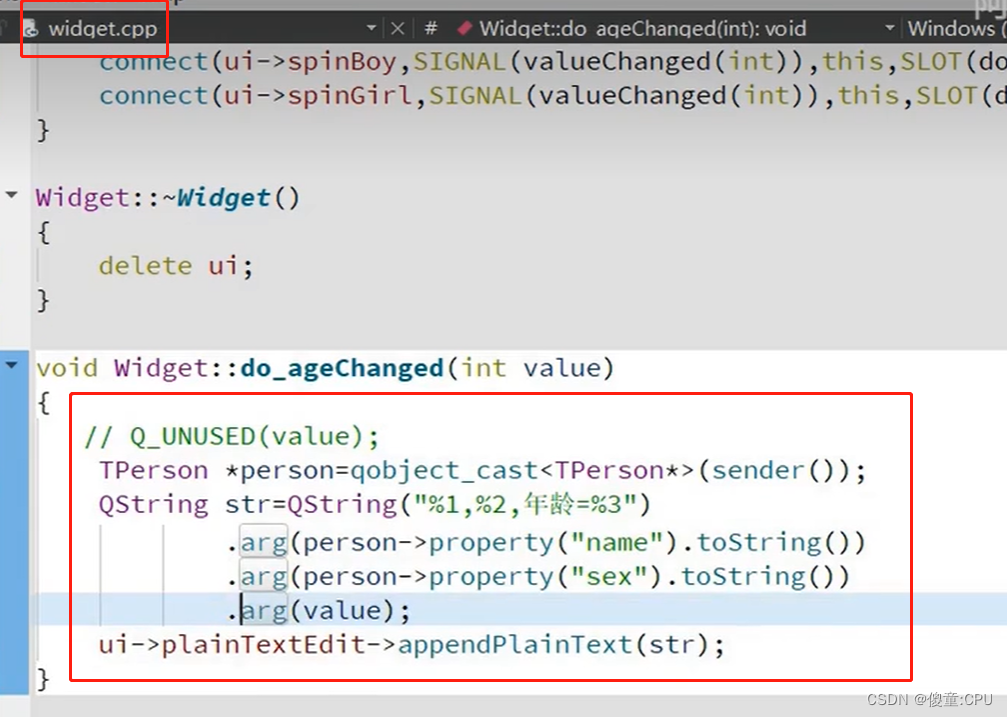
函数作为接口
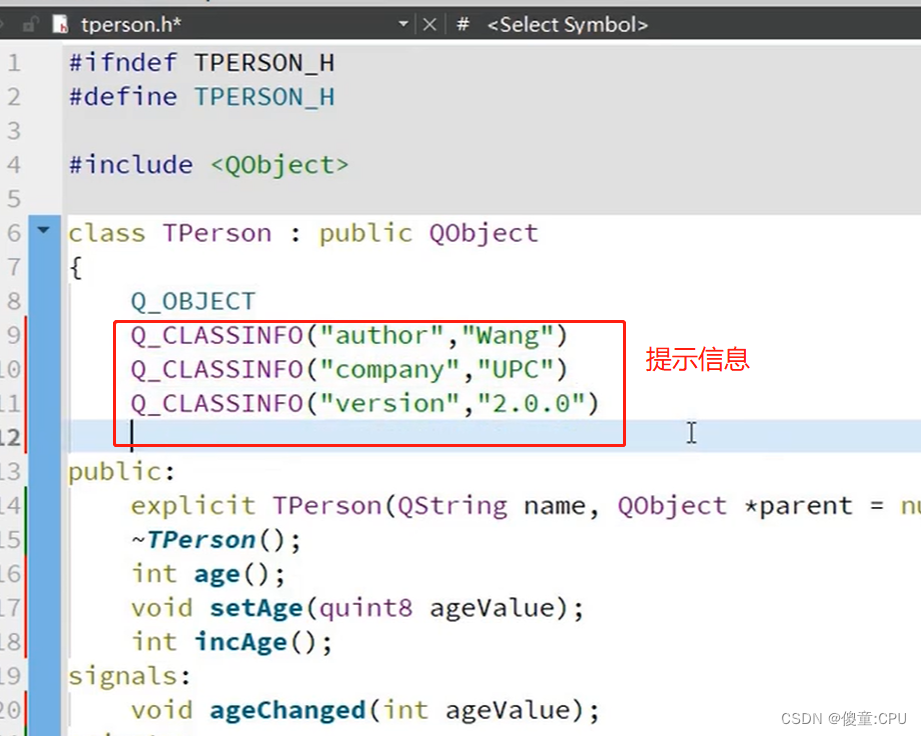
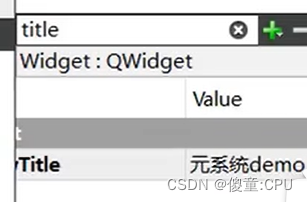
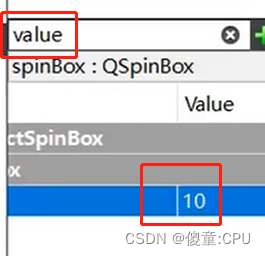
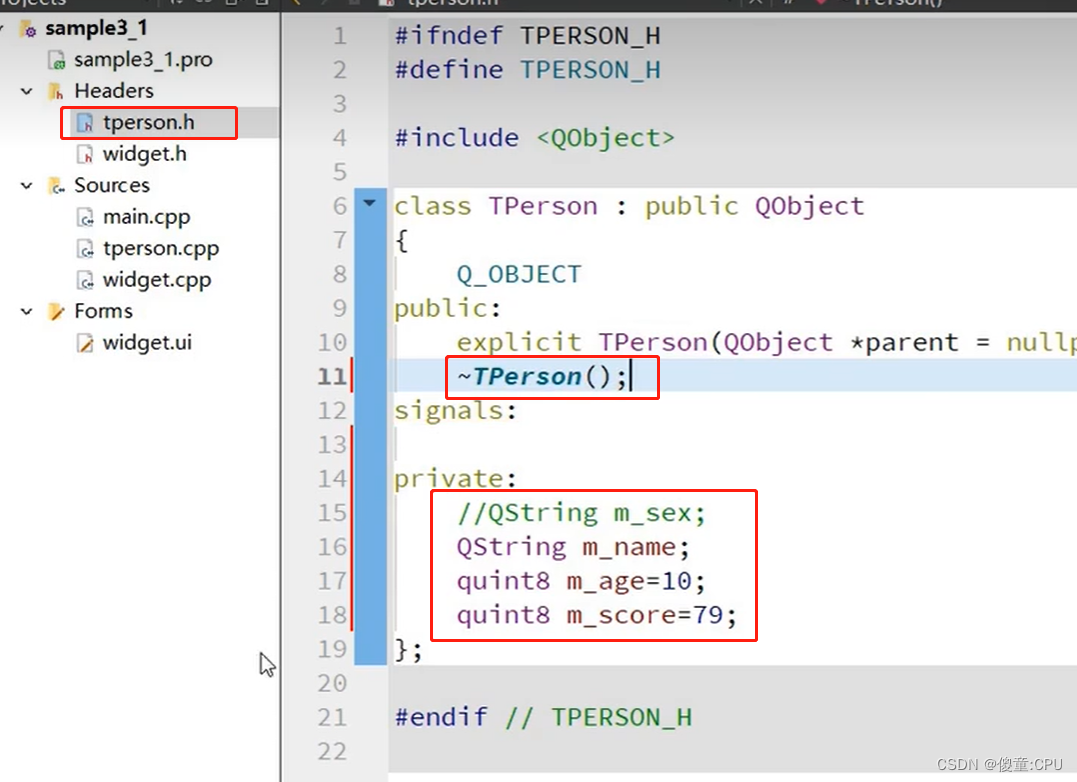
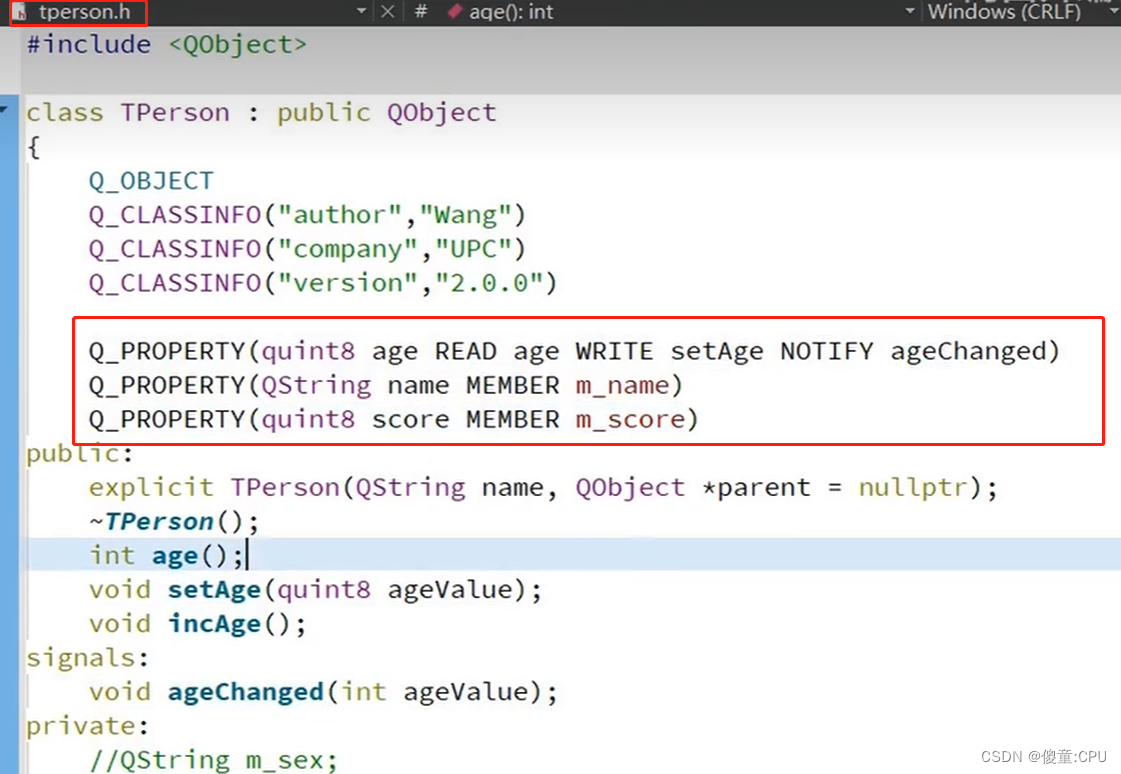
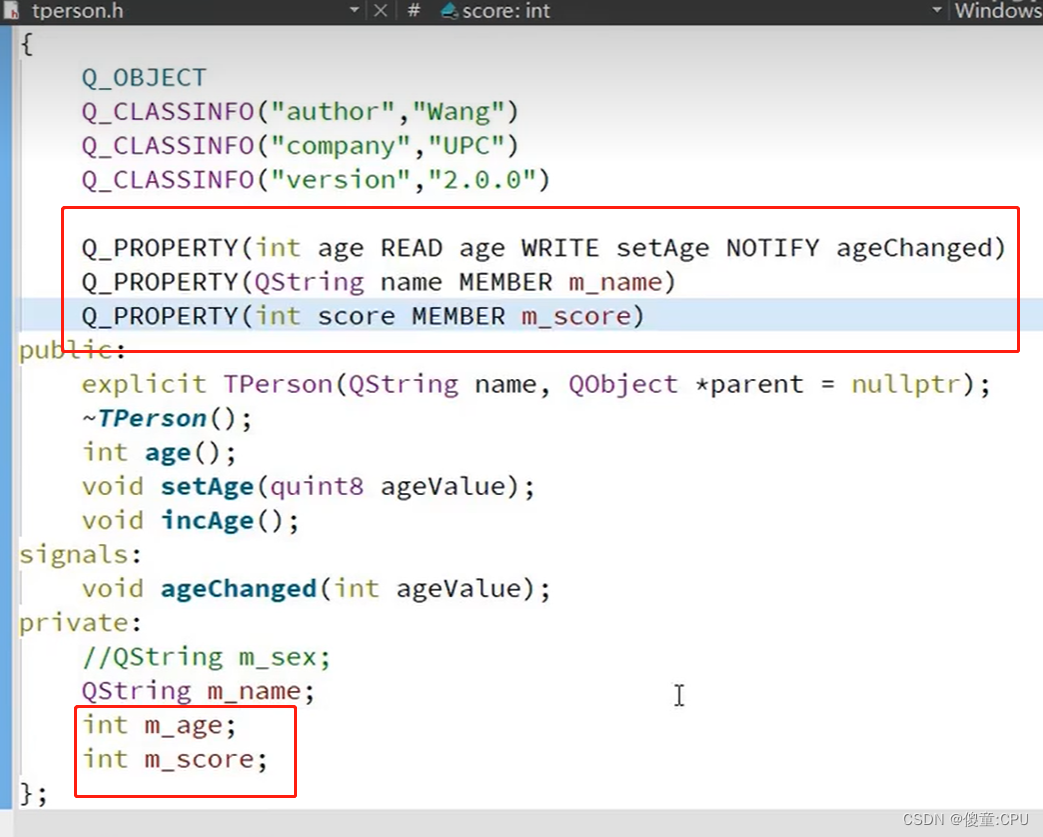
增加一些固定的属性

#-------------------------------------------------
#
# Project created by QtCreator 2023-10-24T21:54:44
#
#-------------------------------------------------QT += core guigreaterThan(QT_MAJOR_VERSION, 4): QT += widgetsTARGET = sample_3
TEMPLATE = app# The following define makes your compiler emit warnings if you use
# any feature of Qt which as been marked as deprecated (the exact warnings
# depend on your compiler). Please consult the documentation of the
# deprecated API in order to know how to port your code away from it.
DEFINES += QT_DEPRECATED_WARNINGS# You can also make your code fail to compile if you use deprecated APIs.
# In order to do so, uncomment the following line.
# You can also select to disable deprecated APIs only up to a certain version of Qt.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0SOURCES += \main.cpp \widget.cpp \tperson.cppHEADERS += \widget.h \tperson.hFORMS += \widget.ui#ifndef TPERSON_H
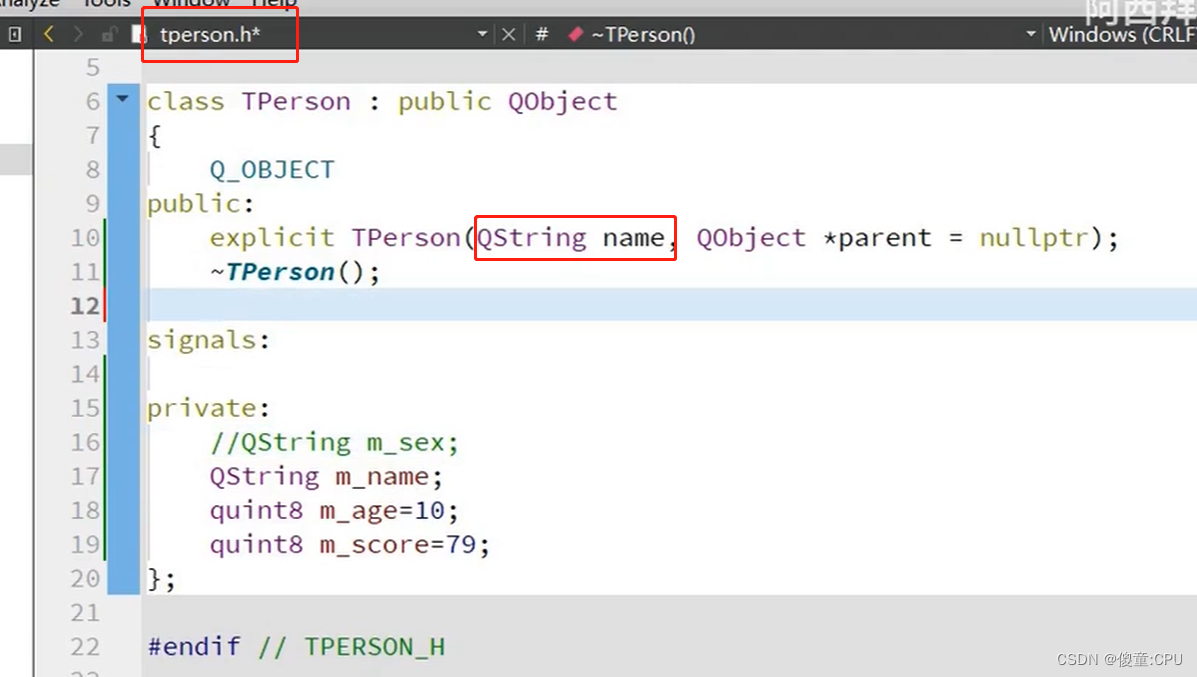
#define TPERSON_H#include <QObject>class TPerson : public QObject
{Q_OBJECT//提示信息Q_CLASSINFO("author","wang")Q_CLASSINFO("company","UPC")Q_CLASSINFO("version","2.0.0")Q_PROPERTY(int age READ age WRITE setAge NOTIFY ageChanged)Q_PROPERTY(QString name MEMBER m_name)Q_PROPERTY(int score MEMBER m_score)
public:explicit TPerson(QString name,QObject *parent = nullptr);~TPerson();//定义函数接口--对接年龄属性int age();//读年龄void setAge(quint8 ageValue);//写年龄void incAge();//增加年龄signals:void ageChanged(int ageValue);//年龄改变时,触发的函数public slots:private://任务属性QString m_name;int m_age = 10;int m_score = 79;
};#endif // TPERSON_H#ifndef WIDGET_H
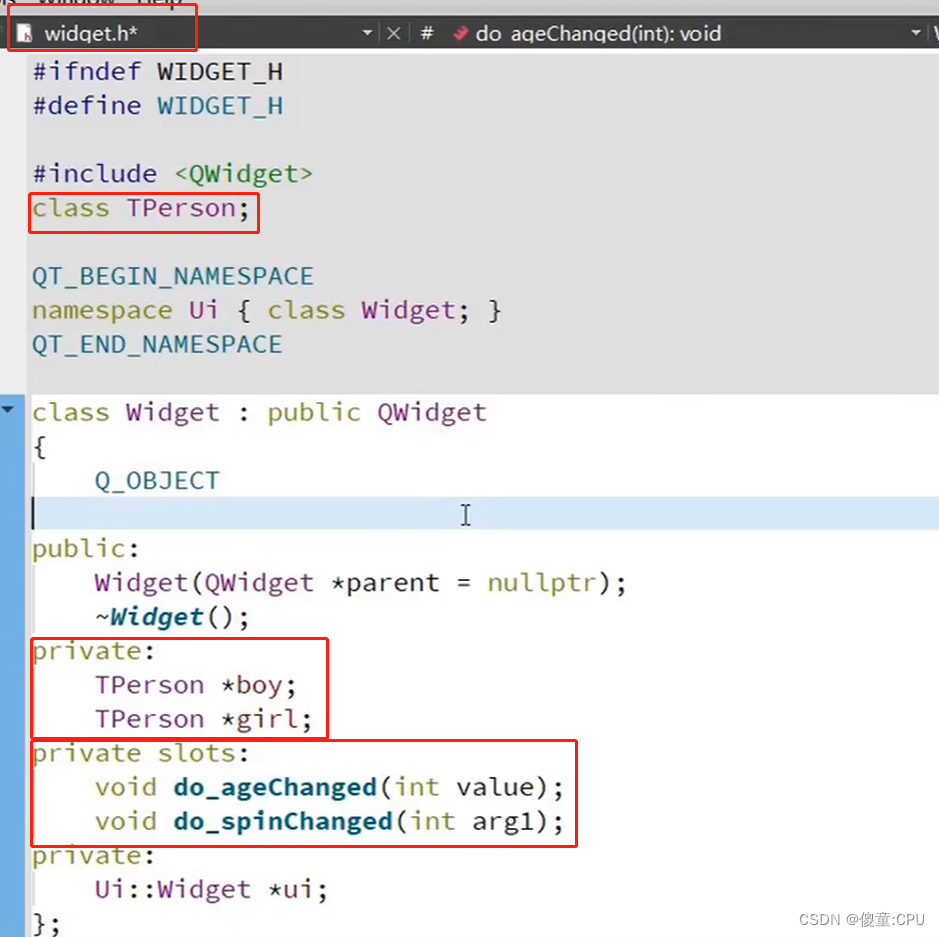
#define WIDGET_H#include <QWidget>
class TPerson;//定义一个类namespace Ui {
class Widget;
}class Widget : public QWidget
{Q_OBJECTpublic:explicit Widget(QWidget *parent = 0);~Widget();private ://定义二个类指针TPerson *boy;TPerson *girl;
private slots://定义二个槽函数void do_ageChanged(int value);void do_spinChanged(int argl);void on_btnBoylnc_clicked();void on_btnGirlnc_clicked();void on_btnClear_clicked();void on_btnClassinfo_clicked();private:Ui::Widget *ui;
};#endif // WIDGET_H#include "widget.h"
#include <QApplication>int main(int argc, char *argv[])
{QApplication a(argc, argv);Widget w;w.show();return a.exec();
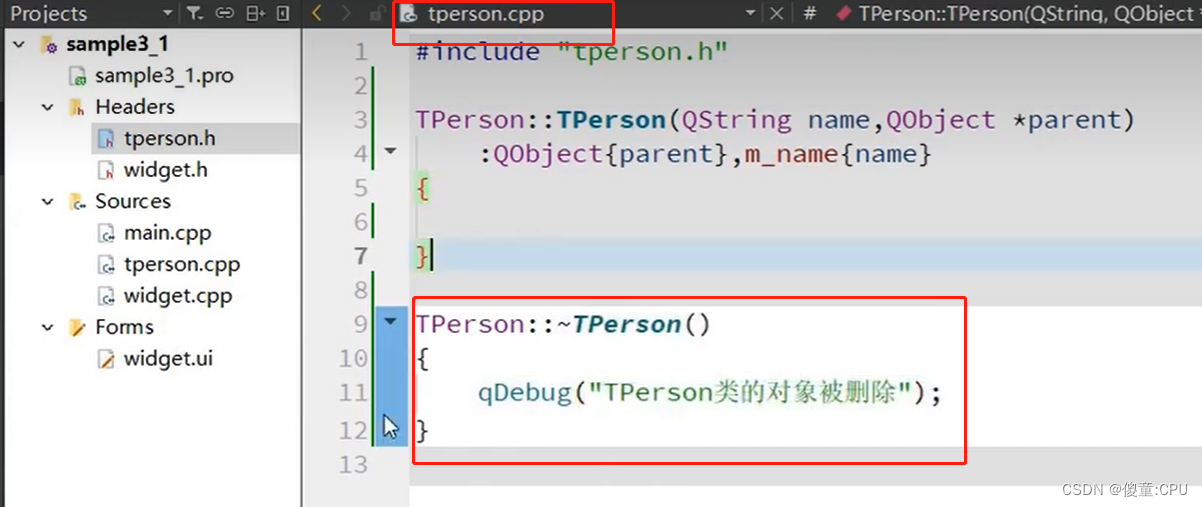
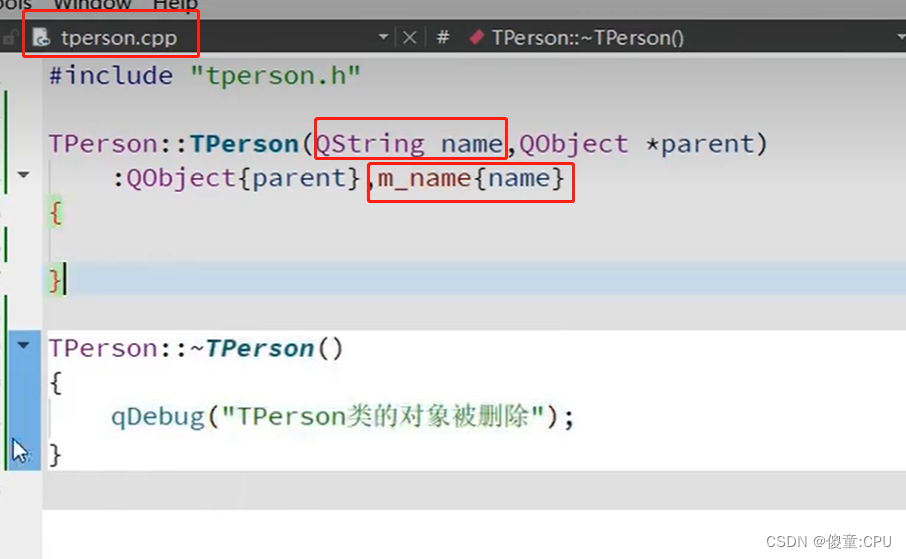
}#include "tperson.h"TPerson::TPerson(QString name,QObject *parent) : QObject(parent),m_name(name)
{}TPerson::~TPerson()
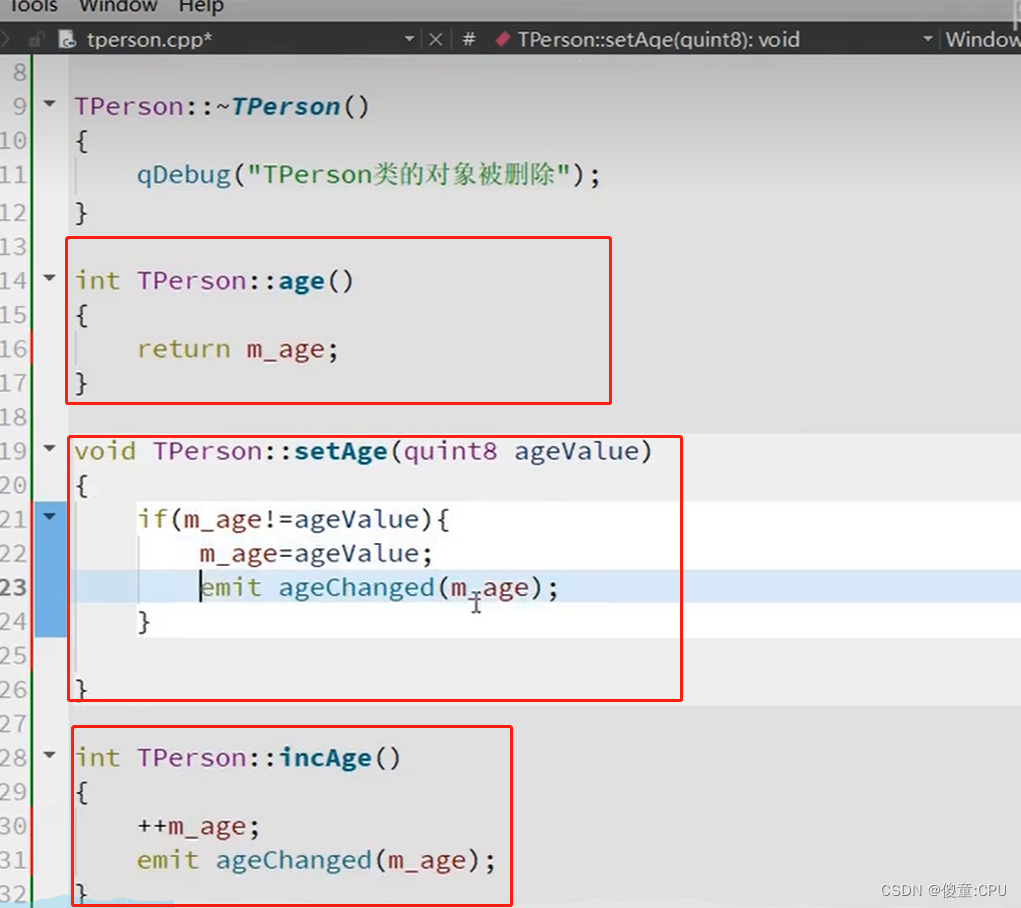
{qDebug("TPerson类的对象被删除");}int TPerson::age()
{return m_age;
}void TPerson::setAge(quint8 ageValue)
{if(m_age != ageValue){m_age = ageValue;emit ageChanged(m_age);}}void TPerson::incAge()
{++m_age;emit ageChanged(m_age);
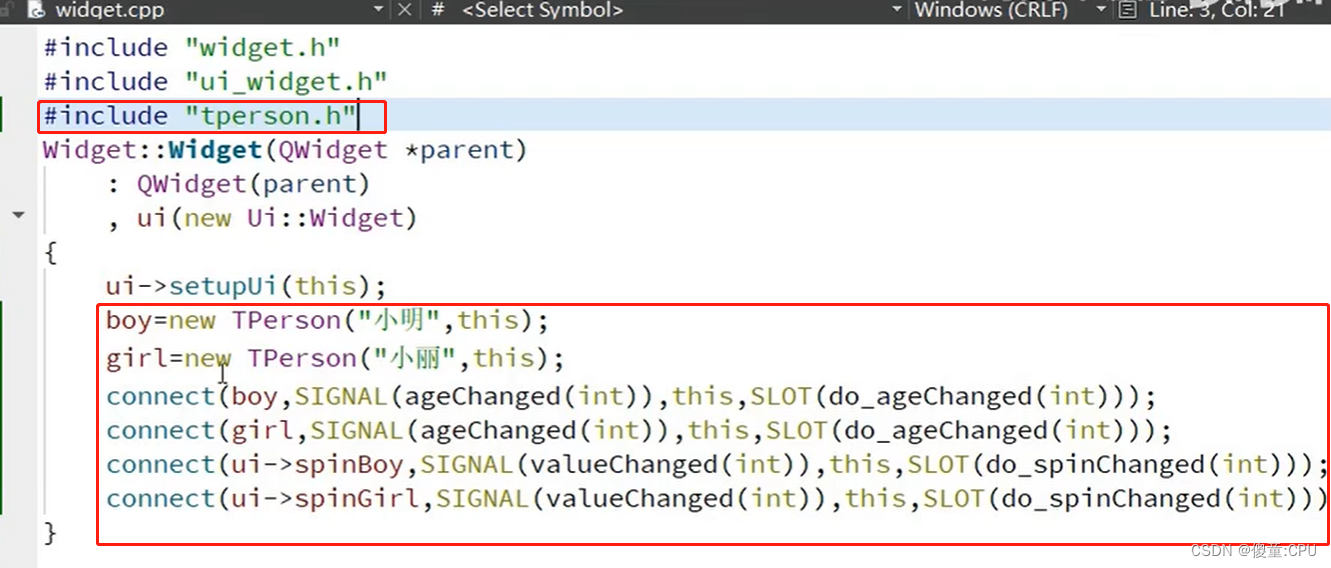
}#include "widget.h"
#include "ui_widget.h"
#include "tperson.h"
#include<QMetaProperty>
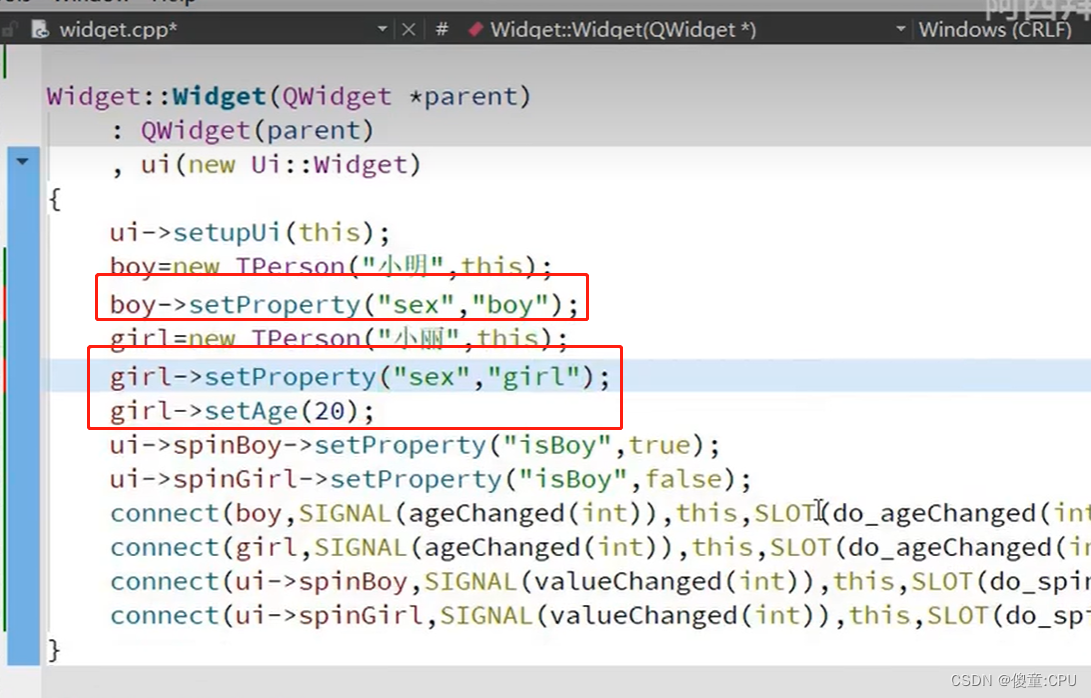
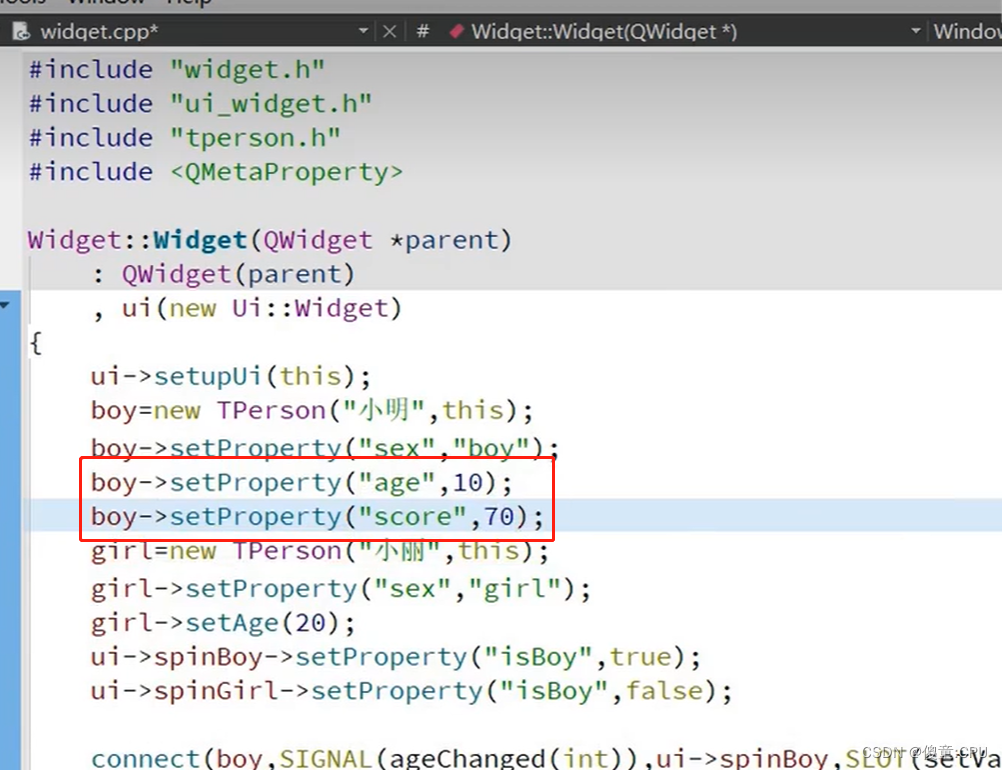
Widget::Widget(QWidget *parent) :QWidget(parent),ui(new Ui::Widget)
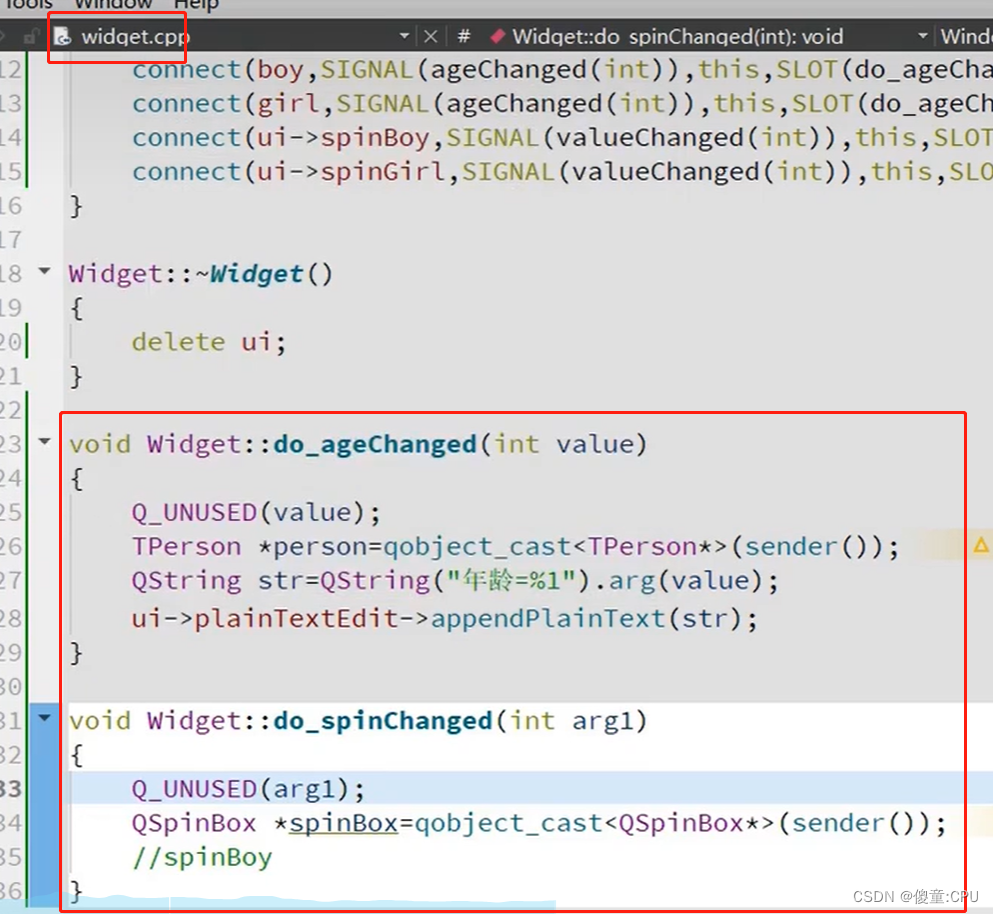
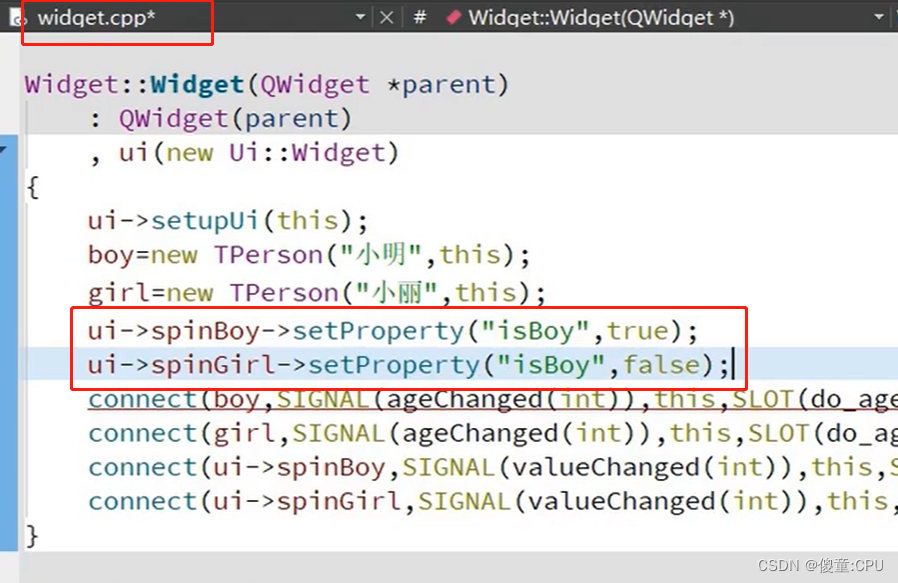
{ui->setupUi(this);//初始化界面boy = new TPerson("小明",this);boy->setProperty("sex","boy");boy->setProperty("age",10);boy->setProperty("score",70);girl = new TPerson("小丽",this);girl->setProperty("sex","gril");girl->setAge(20);ui->spinBoy->setProperty("isBoy",true);ui->spinGirl->setProperty("isBoy",false);connect(boy,SIGNAL(ageChanged(int)),ui->spinBoy,SLOT(setValue(int)));connect(girl,SIGNAL(ageChanged(int)),ui->spinGirl,SLOT(setValue(int)));connect(boy,SIGNAL(ageChanged(int)),this,SLOT(do_ageChanged(int)));connect(girl,SIGNAL(ageChanged(int)),this,SLOT(do_ageChanged(int)));connect(ui->spinBoy,SIGNAL(valueChanged(int)),this,SLOT(do_spinChanged(int)));connect(ui->spinGirl,SIGNAL(valueChanged(int)),this,SLOT(do_spinChanged(int)));
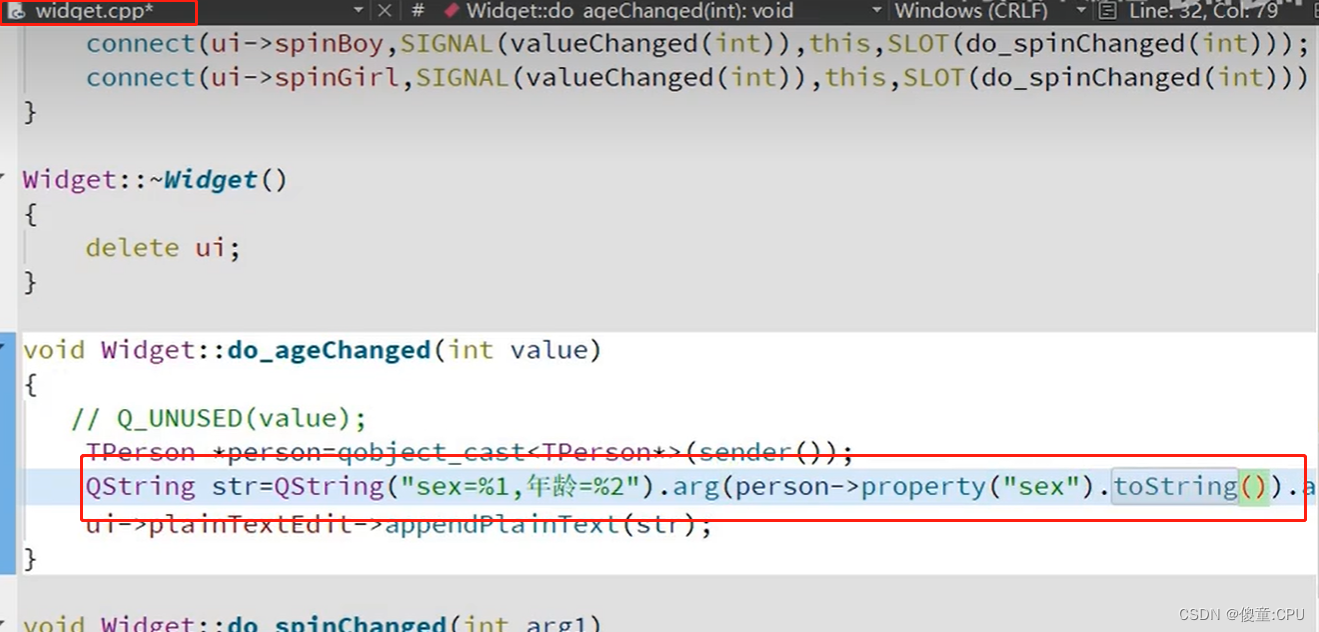
}Widget::~Widget()
{delete ui;
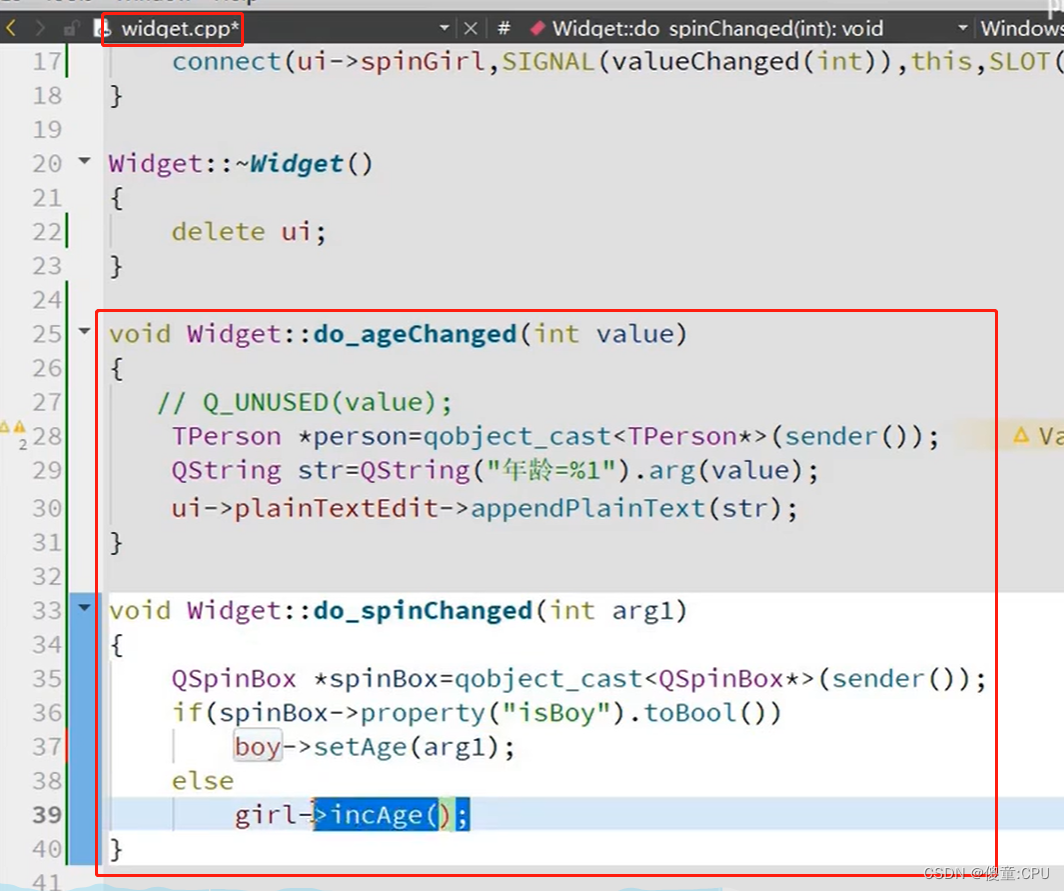
}void Widget::do_ageChanged(int value)
{//Q_UNUSED(value);TPerson *person = qobject_cast<TPerson*>(sender());QString str = QString("name=%1,sex=%2,年龄=%3").arg(person->property("name").toString()).arg(person->property("sex").toString()).arg(value);ui->plainTextEdit->appendPlainText(str);
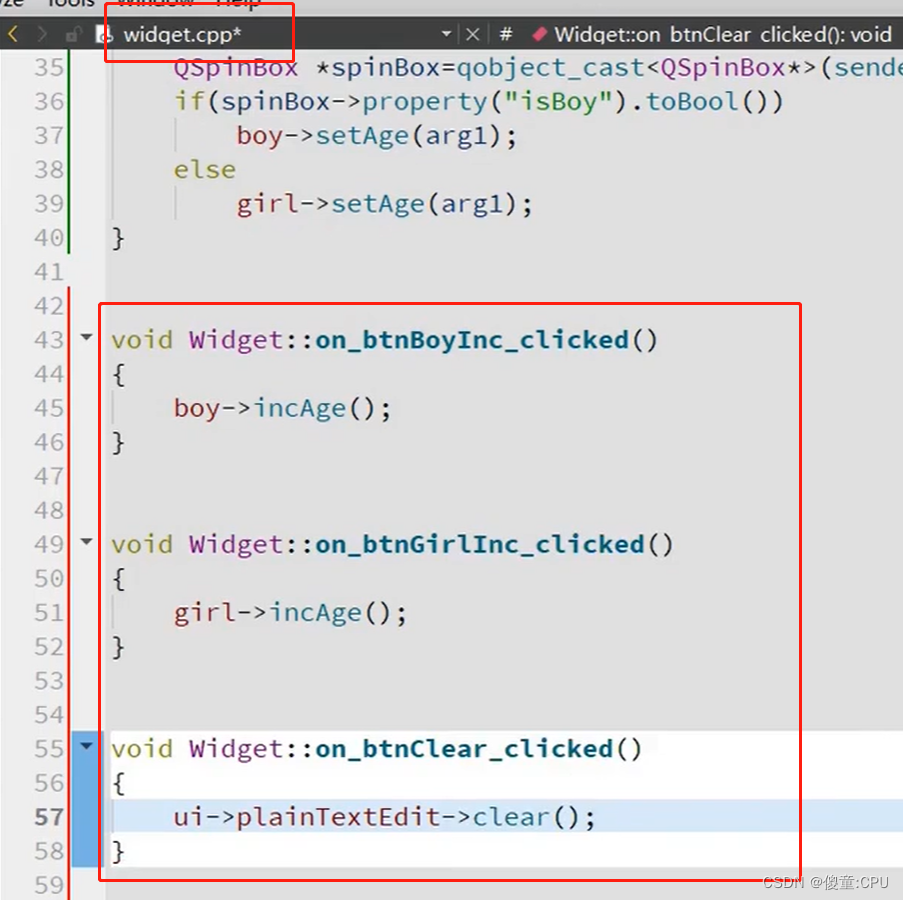
}void Widget::do_spinChanged(int argl)
{//Q_UNUSED(argl);QSpinBox *spinBox = qobject_cast<QSpinBox*>(sender());if(spinBox->property("isBoy").toBool())boy->setAge(argl);elsegirl->incAge();
}void Widget::on_btnBoylnc_clicked()
{boy->incAge();
}void Widget::on_btnGirlnc_clicked()
{girl->incAge();
}void Widget::on_btnClear_clicked()
{ui->plainTextEdit->clear();
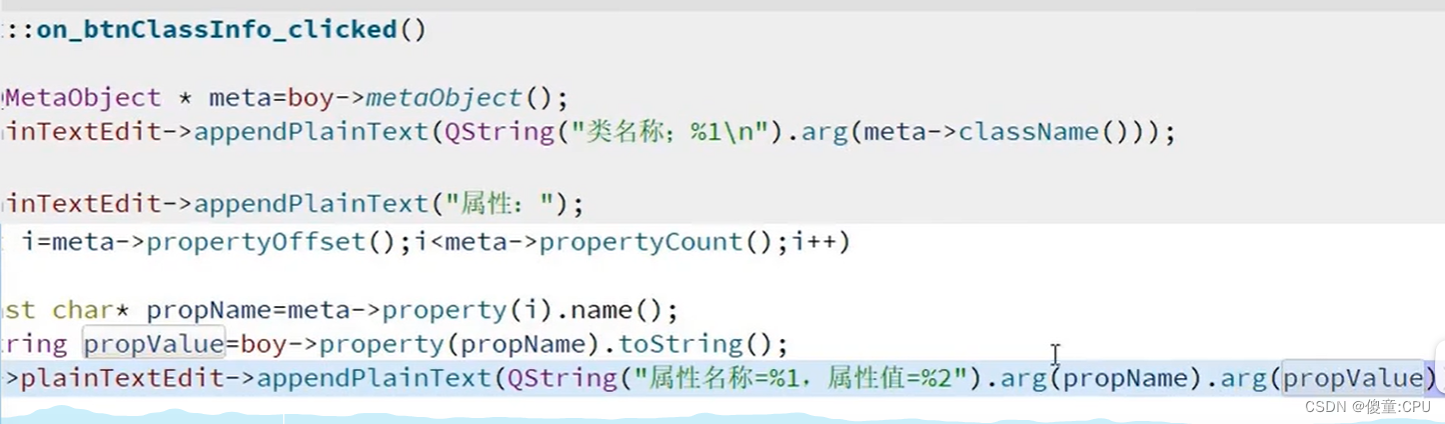
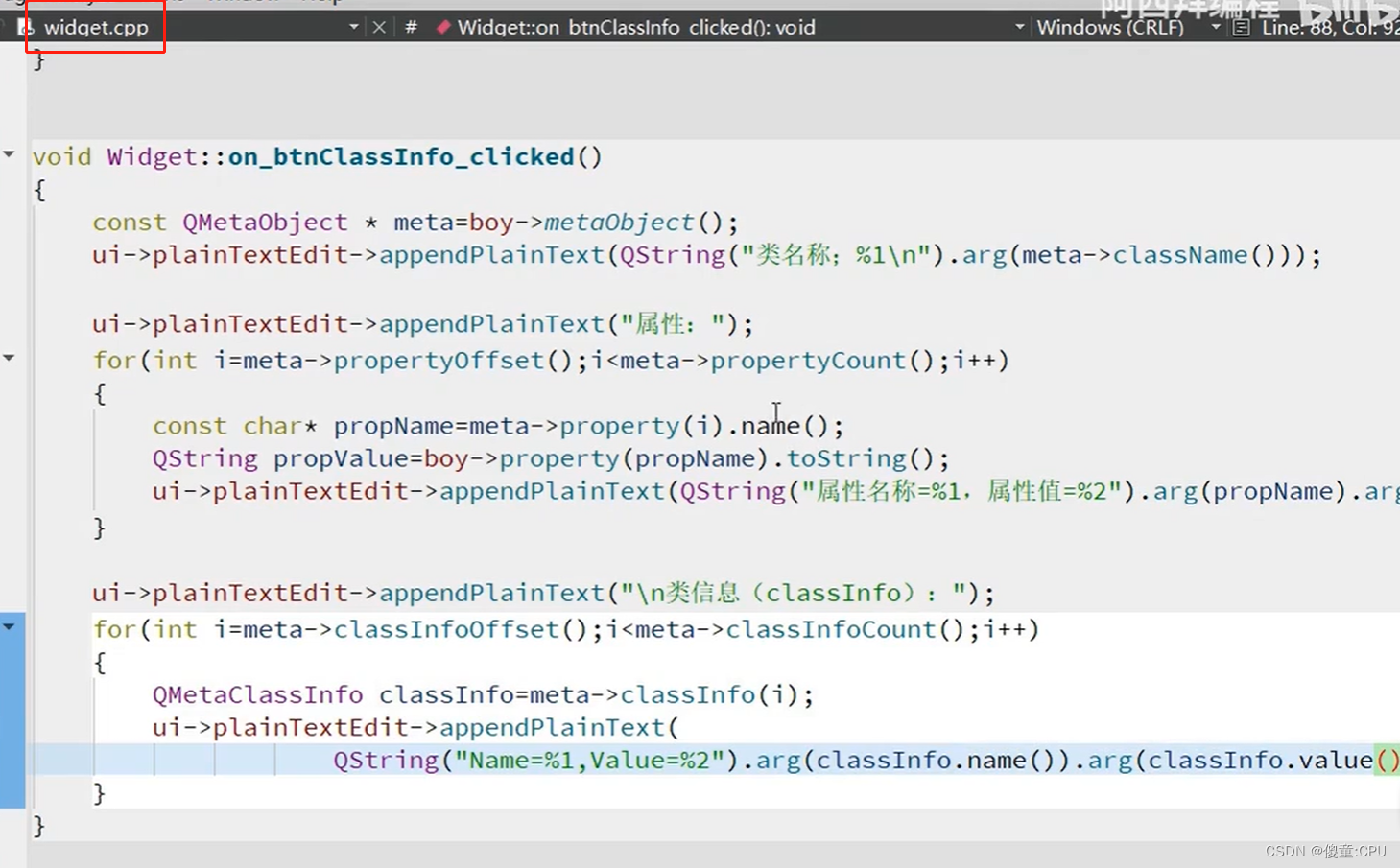
}void Widget::on_btnClassinfo_clicked()
{const QMetaObject *meta = boy->metaObject();ui->plainTextEdit->appendPlainText(QString("类名称:%1\n").arg(meta->className()));ui->plainTextEdit->appendPlainText("属性:");for(int i = meta->propertyOffset();i < meta->propertyCount();i++){const char *proName = meta->property(i).name();QString propValue = boy->property(proName).toString();ui->plainTextEdit->appendPlainText(QString("属性名称=%1,属性值=%2").arg(proName).arg(propValue));}ui->plainTextEdit->appendPlainText("\n类信息(classInfo):");for(int i = meta->propertyOffset();i < meta->propertyCount();i++){QMetaClassInfo classInfo = meta->classInfo(i);ui->plainTextEdit->appendPlainText(QString("Name=%1,value=%2").arg(classInfo.name()).arg(classInfo.value()));}
}