万润 企业网站建设邳州微网站开发
绕过网页的阻止复制
- 一、问题的提出
- 二、绕过技巧一
- 三、绕过技巧二
- 四、绕过技巧三
- 五、总结说明
一、问题的提出
也是很久没有写文章了,今天突发奇想写一篇文章。首先你有没有被网页中的一些阻止你复制的页面所困扰。就是那种,你突然找到一篇文章,你兴致勃勃的想要复制粘贴到 word 文档中,然后发现他给你拉了坨大的,让你先登录,如果是这样的话还好,但有一些就很烦人。你登陆之后,就会发现让你开通 vip 才让你复制粘贴。咱学啥的,咱是要学网安的人。网安中有一个概念就是绕过。所以让我们来讨论以下如何绕过。

二、绕过技巧一
绕过技巧一:查看源码
- 快捷键:ctrl + u
- 普通:右键 ---- 查看源码

这个说实在不是很好用,有时候看不到具体的内容,而且找起来也挺麻烦的
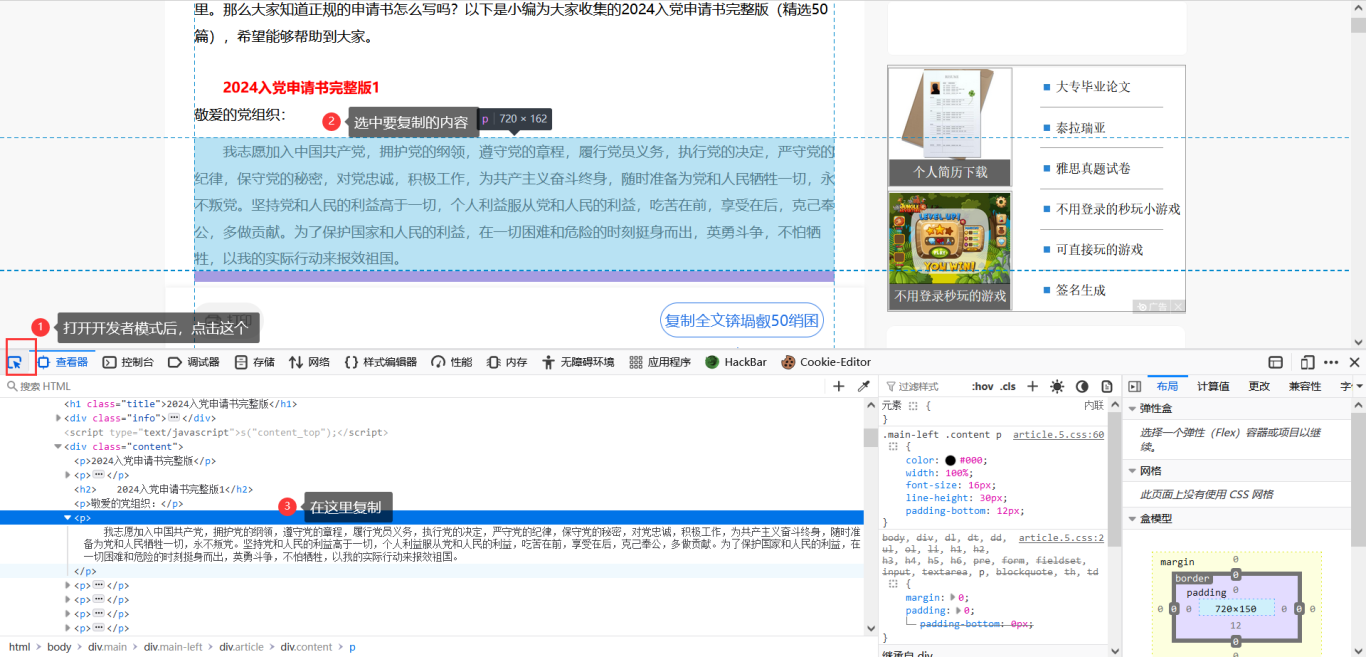
三、绕过技巧二
绕过技巧二:打开开发者模式
- 快捷键一:F12
- 快捷键二:ctrl + shift +I
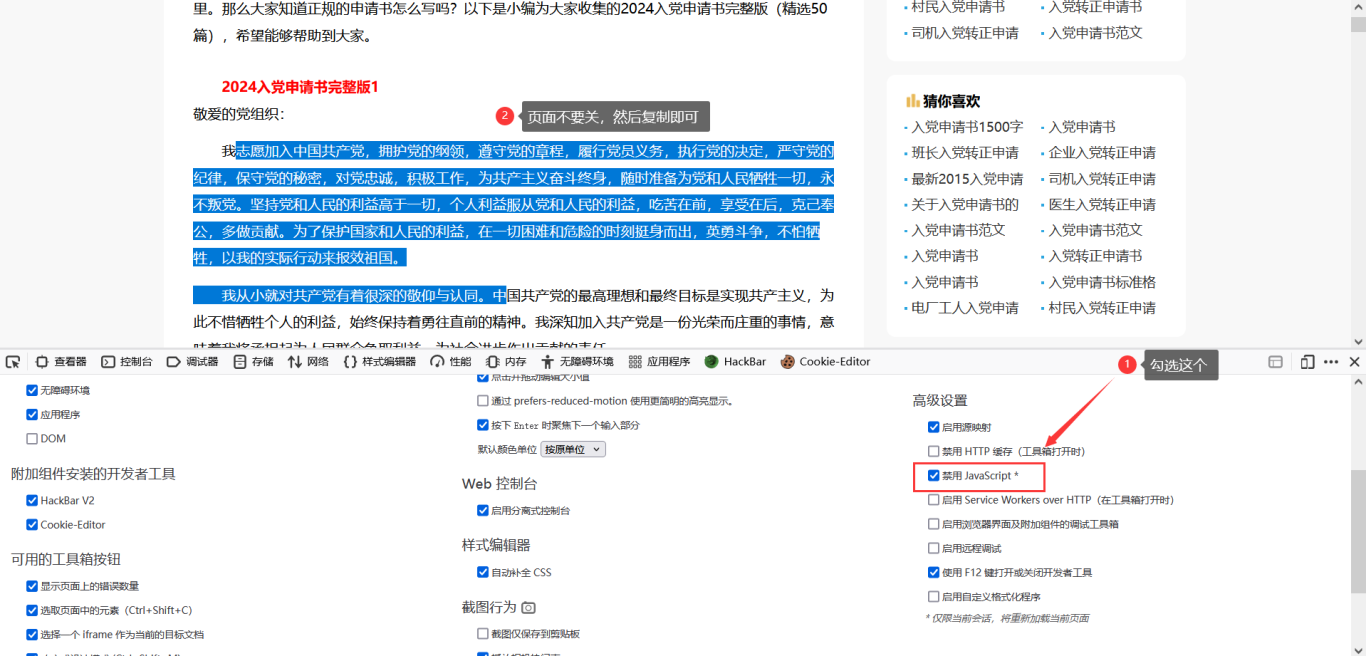
四、绕过技巧三
绕过技巧三:仍然打开开发者模式,打开后按住 F1 (这个是开发者模式的设置)
五、总结说明
其实还有挺多技巧的,如插件等,这就不在这一一说明了。对于不同的浏览器可能快捷键会有所不同,这要具体看浏览器,但总的思想还是不变的。最后要说一句,有些网站会比较坑,他会把你的一些快捷键给他禁用,更坑的有些会把你的右键禁用。这时就需要你自己找到这些模块的位置然后去操作了。如果你有更好的技巧也能分享以下,相互学习,相互进步。好的,下课!