产品代理平台关键词推广优化
文章目录
- 1、安装Git
- 2、创建GitLab项目文件夹
- 3、创建密钥
- 4、向GitLab上传项目
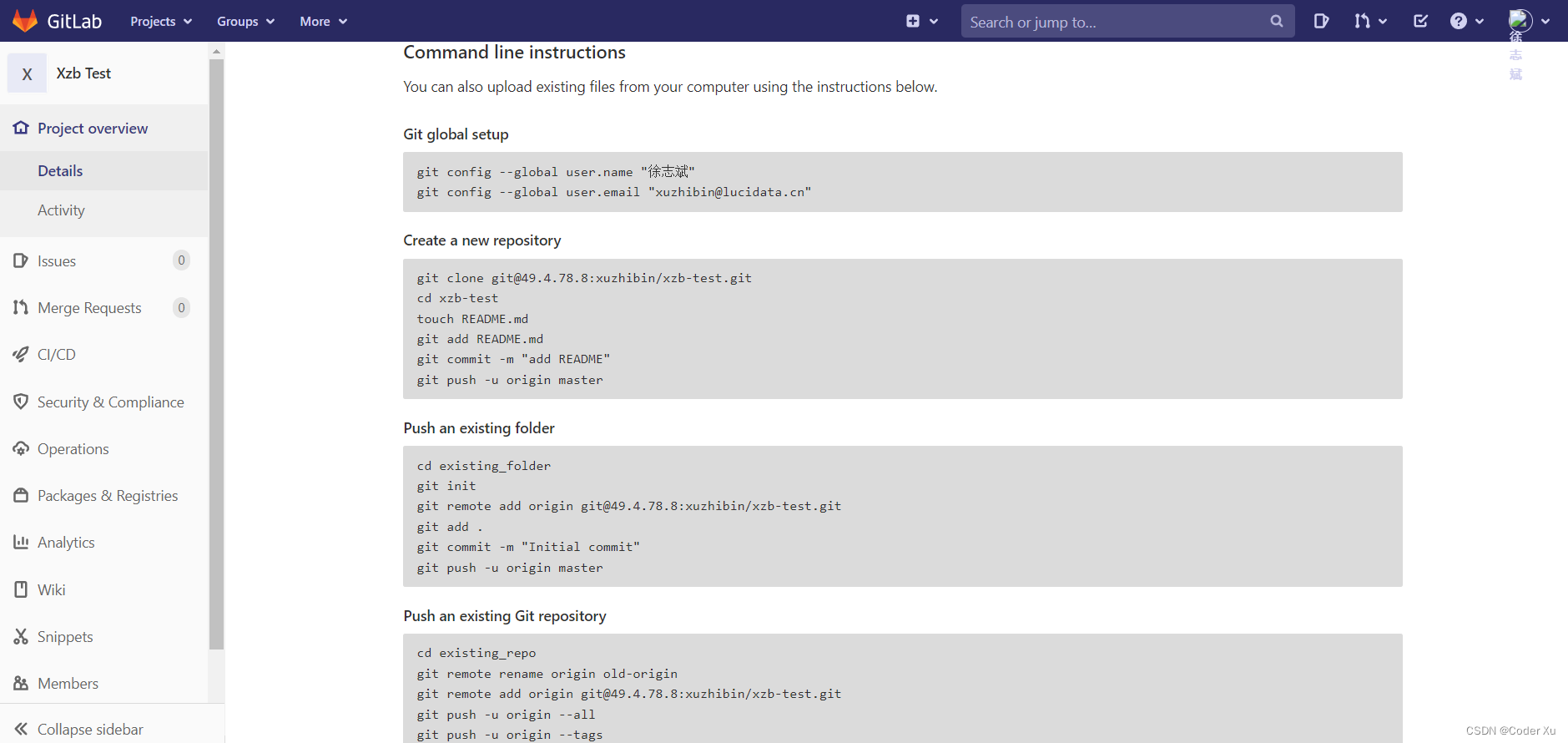
注意:本篇文章中提到的上传流程所需要的命令,几乎在GitLab的
Command line instructions中都有所记载
1、安装Git
具体安装流程这里不做过多说明,安装流程可以参考文章:https://blog.csdn.net/mukes/article/details/115693833
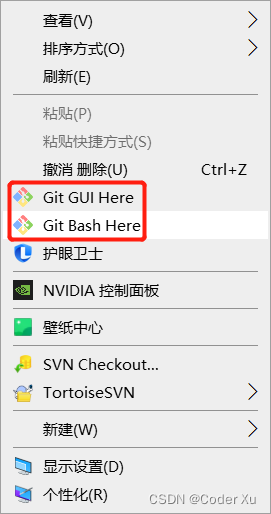
Git安装成功后,桌面点击鼠标右键会有提示:
2、创建GitLab项目文件夹
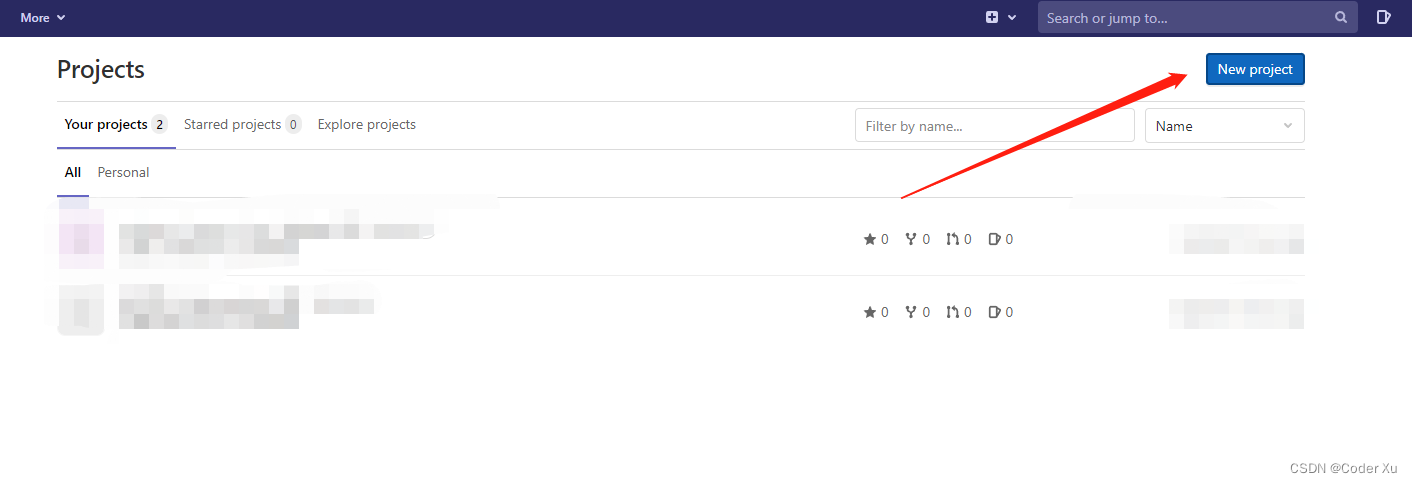
- 点击
New Project:
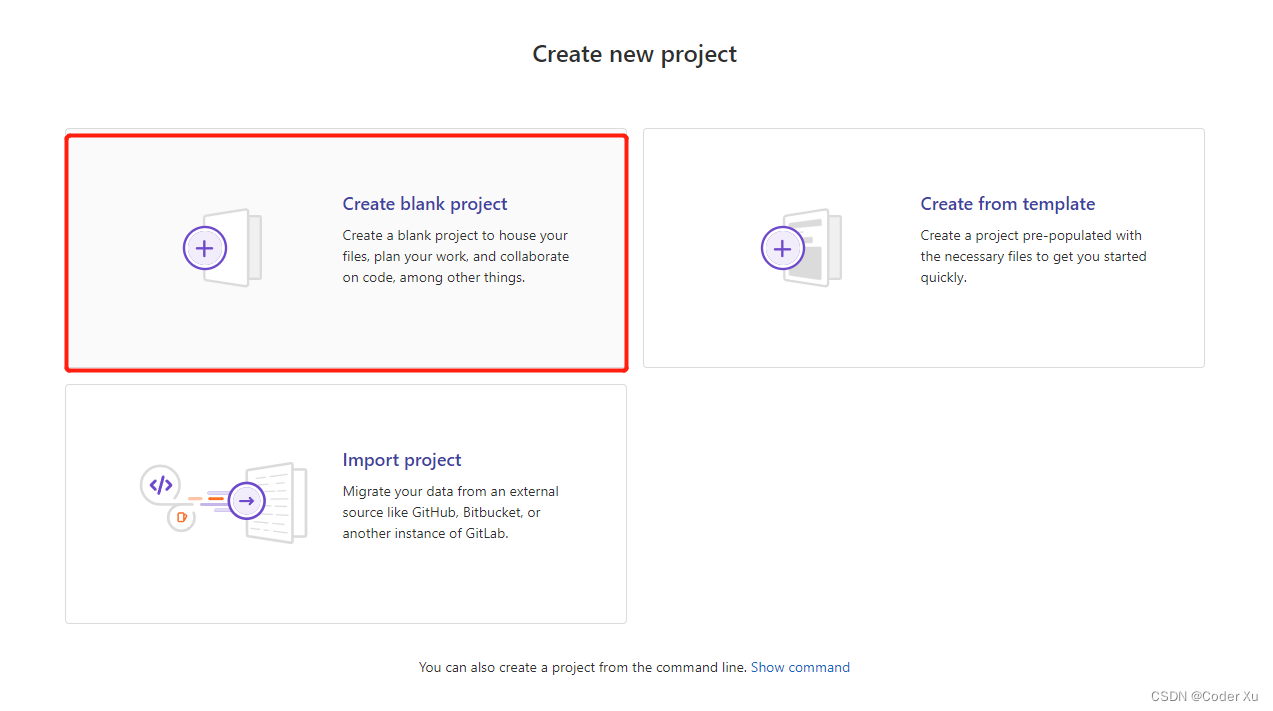
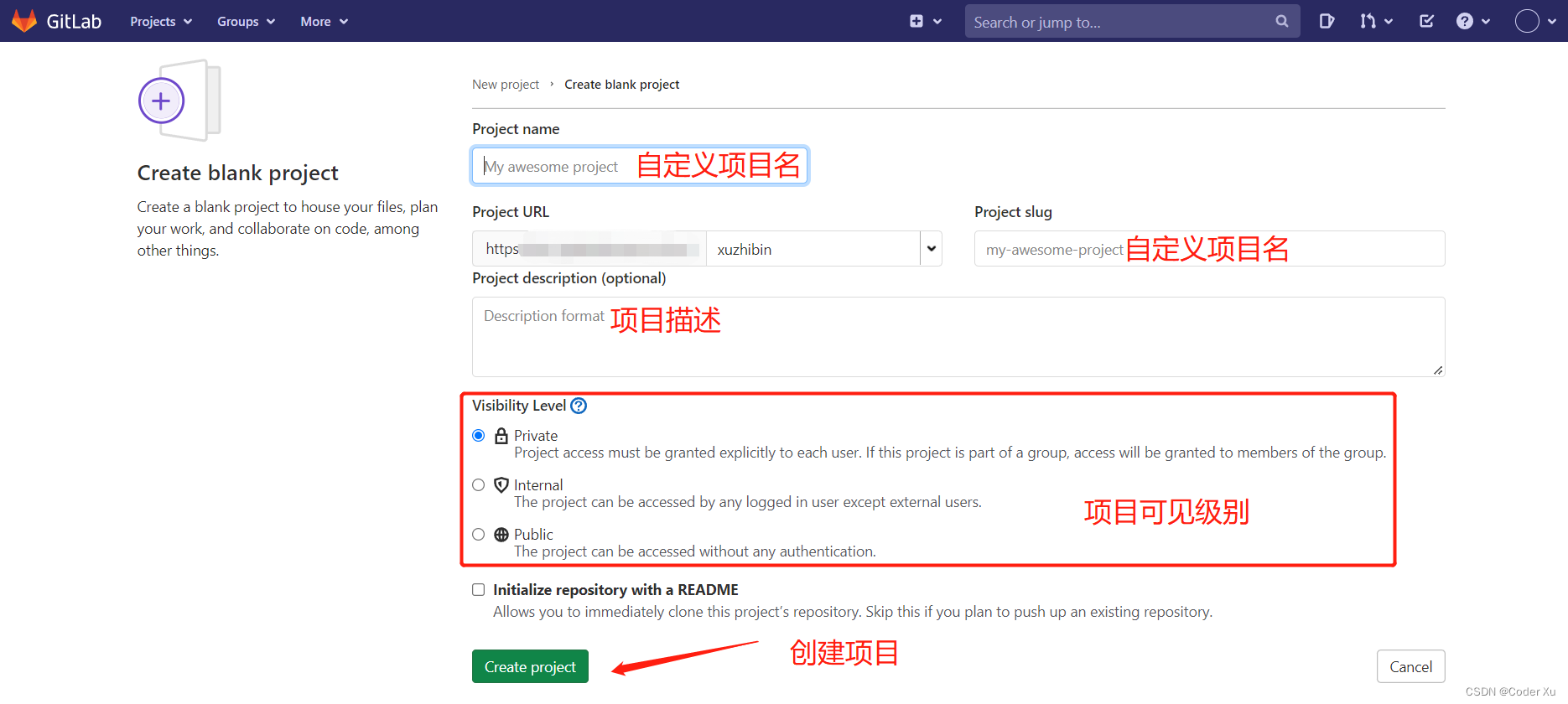
- 点击
Create blank project:
- 创建项目:
3、创建密钥
- 桌面鼠标右键,点击
Git Bash Here,进入命令行:
- 打开控制台后,输入命令进入到
.ssh目录:
# 如果没有.ssh目录(No such file or directory)
# 先执行创建目录命令:mkdir ~/.ssh
cd ~/.ssh/
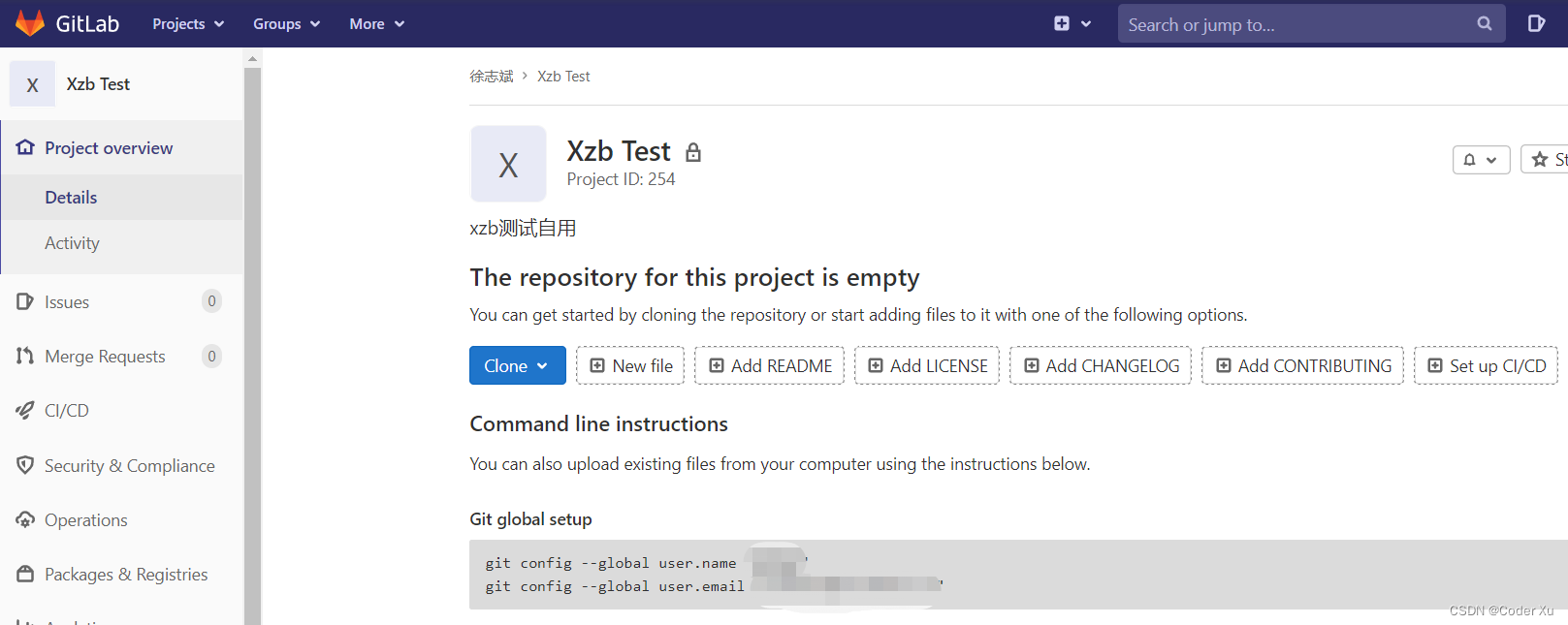
- 配置全局信息,可以参照前言中
Glt global set up:
git config --global user.name "xxx"
git config --global user.email "xxx"
- 该命令用于生成SSH密钥(一般使用上一步骤中的
user.name):
# xxx一般用上面的全局配置user.email
ssh-keygen -t rsa -C "xxx"
执行完命令后,需要连续回车三次,最后会在.ssh文件目录下生成id_rsa.pub文件,该文件中存放了SSH密钥内容,将密钥内容粘贴到GitLab中,点击Add key按钮: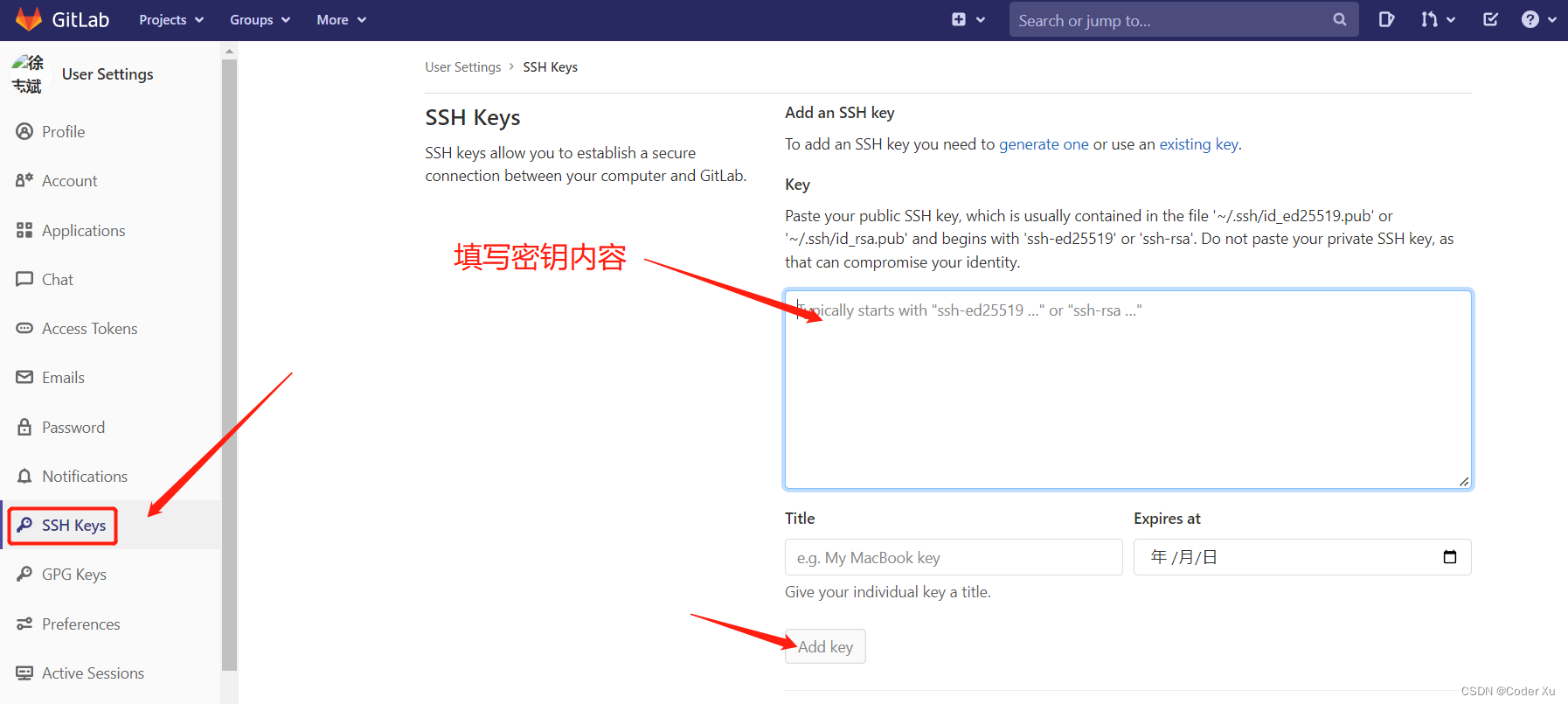
4、向GitLab上传项目
- 鼠标左键选中需要上传的项目文件夹,右键打开命令行:

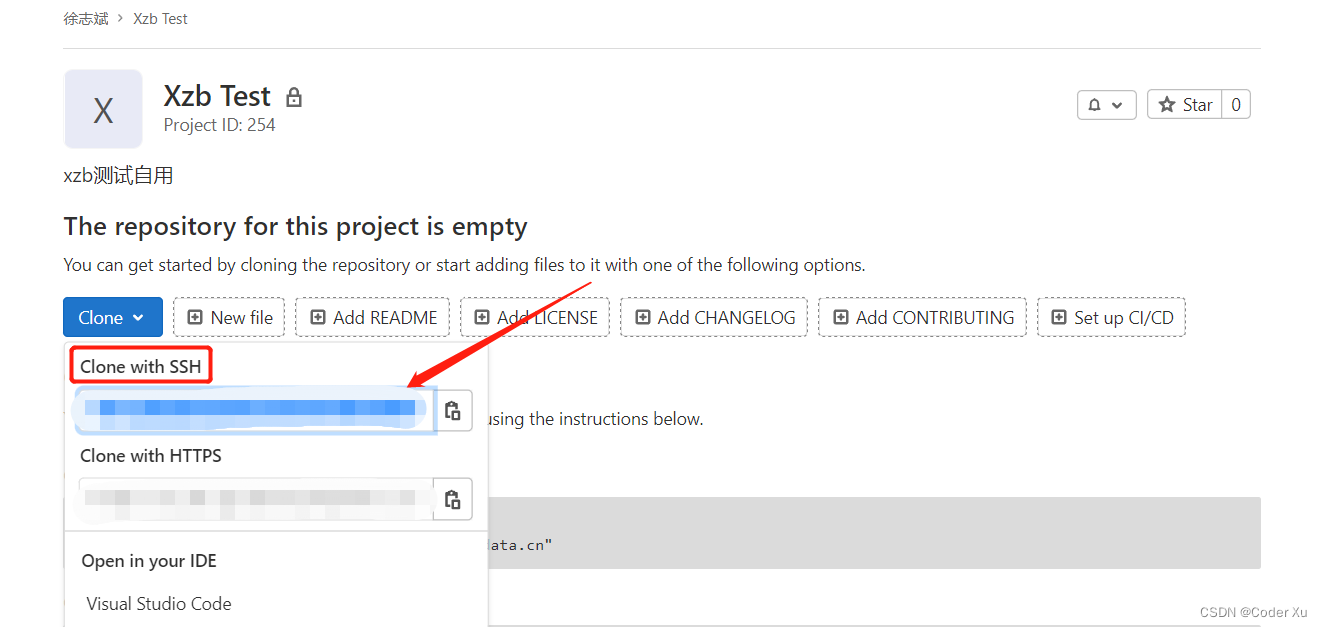
- 执行
git init命令,在该文件夹下创建仓库 - 参考下图
Clone With SSH的值,执行命令:
# "xxx"为Clone With SSH的值
git remote add origin "xxx"
- 执行
git add .命令 - 执行
提交、推送命令,将项目上传到GitLab项目文件夹中:
# "xxx"为项目名称
git commit -m "xxx"
git push -u origin master
这样,我们的本地项目就成功上传到GitLab中了