揭阳响应式网站价格小程序商城使用教程
使用的是 阿里云 阿里云官网
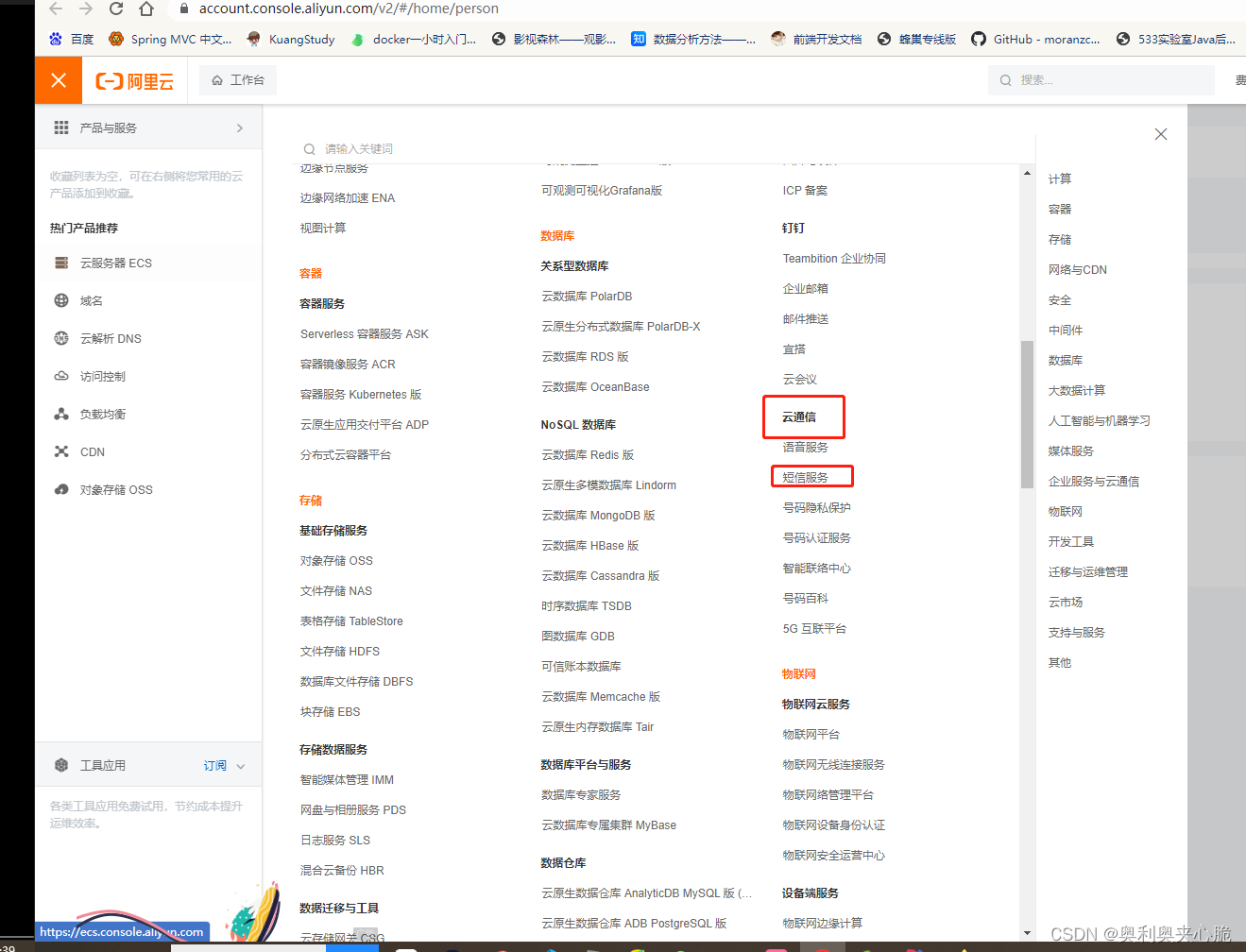
1.找到 左上角侧边栏 -云通信 -短信服务
2.在快速学习测试处 ,按照步骤完成快速学习,绑定要测试的手机号,选专用 【测试模板】,自定义模板需要人工审核,要一个工作日

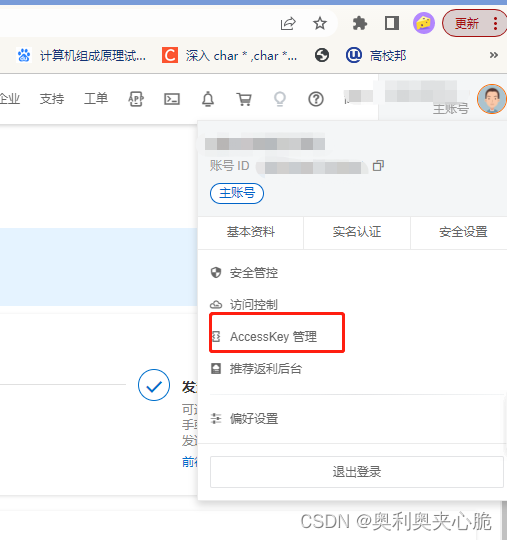
3.右上角 获取 AccessKey 管理,获取
选择子用户,这样即使 AccessKey 泄露,也不会危机自己的阿里云账户
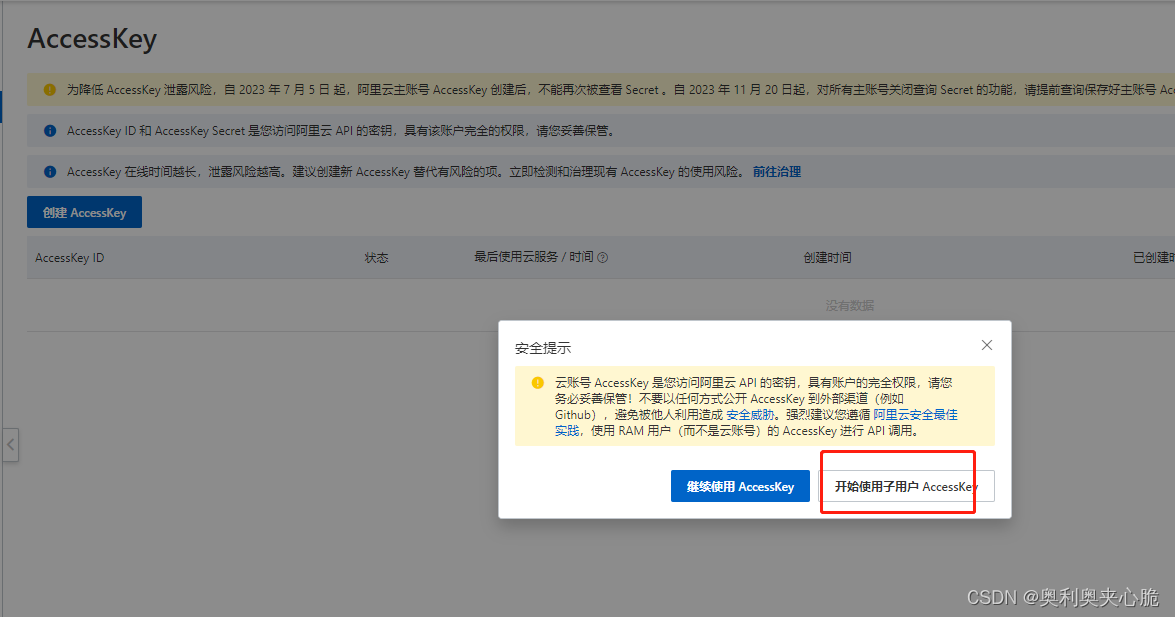
创建用户

进入 -获取 AccessKey ID和AccessKey 密码,只能看一次 ,截图
4.编写短信服务 api
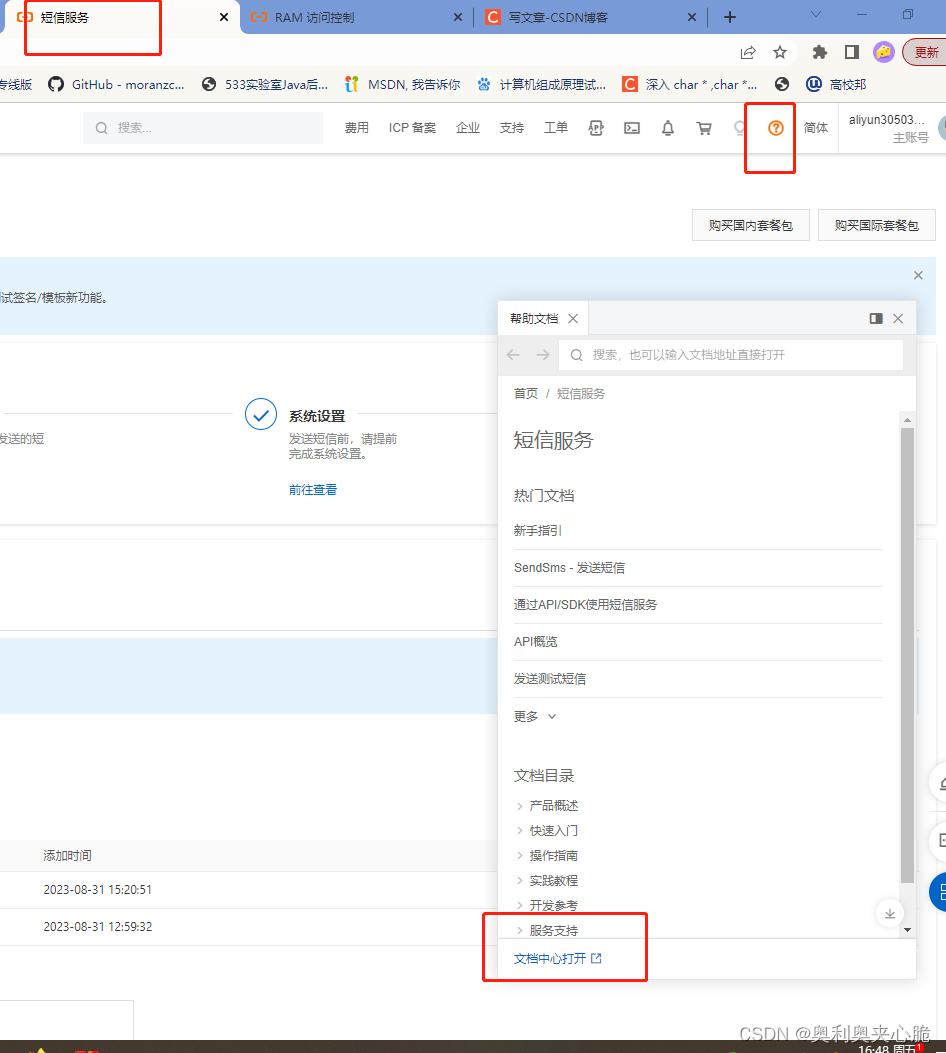
短信服务页面-点右上角问号-点文档打开
选到Java SDK–右边 安装与使用教程
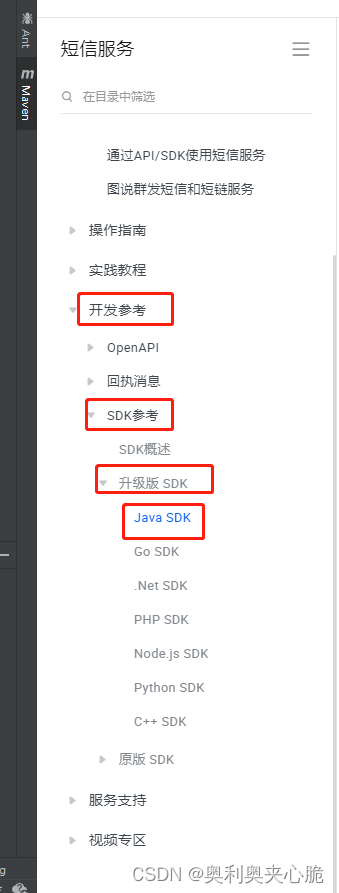
有安装环境和完整代码
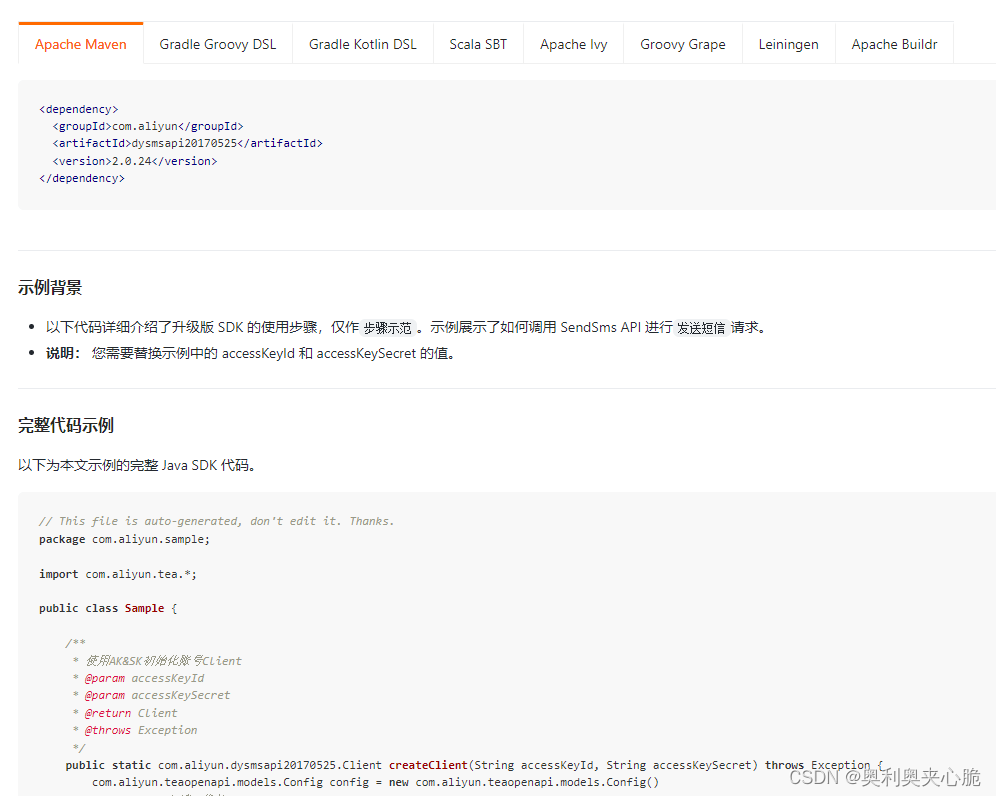
环境
<!--阿里云短信服务--><dependency><groupId>com.aliyun</groupId><artifactId>aliyun-java-sdk-core</artifactId><version>4.5.16</version></dependency><dependency><groupId>com.aliyun</groupId><artifactId>aliyun-java-sdk-dysmsapi</artifactId><version>2.1.0</version></dependency>
这边贴两个常见工具类
SMSUtils 短信发送工具类
这里面需要修改accessKeyId, accessKeySecret
package com.ruigei.demo.Utils;import com.aliyuncs.DefaultAcsClient;
import com.aliyuncs.IAcsClient;
import com.aliyuncs.dysmsapi.model.v20170525.SendSmsRequest;
import com.aliyuncs.dysmsapi.model.v20170525.SendSmsResponse;
import com.aliyuncs.exceptions.ClientException;
import com.aliyuncs.profile.DefaultProfile;/*** 短信发送工具类*/
public class SMSUtils {/*** 发送短信** @param signName 签名* @param templateCode 模板* @param phoneNumbers 手机号* @param param 参数*/public static void sendMessage(String signName, String templateCode, String phoneNumbers, String param) {DefaultProfile profile = DefaultProfile.getProfile("cn-hangzhou","你的 accessKeyId","你的 accessKeySecret");IAcsClient client = new DefaultAcsClient(profile);SendSmsRequest request = new SendSmsRequest();request.setSysRegionId("cn-hangzhou");request.setPhoneNumbers(phoneNumbers);request.setSignName(signName);request.setTemplateCode(templateCode);request.setTemplateParam("{\"code\":\"" + param + "\"}");try {SendSmsResponse response = client.getAcsResponse(request);System.out.println("短信发送成功");} catch (ClientException e) {e.printStackTrace();}}}ValidateCodeUtils 随机生成验证码工具类
package com.ruigei.demo.Utils;import java.util.Random;/*** 随机生成验证码工具类*/
public class ValidateCodeUtils {/*** 随机生成验证码* @param length 长度为4位或者6位* @return*/public static Integer generateValidateCode(int length){Integer code =null;if(length == 4){code = new Random().nextInt(9999);//生成随机数,最大为9999if(code < 1000){code = code + 1000;//保证随机数为4位数字}}else if(length == 6){code = new Random().nextInt(999999);//生成随机数,最大为999999if(code < 100000){code = code + 100000;//保证随机数为6位数字}}else{throw new RuntimeException("只能生成4位或6位数字验证码");}return code;}/*** 随机生成指定长度字符串验证码* @param length 长度* @return*/public static String generateValidateCode4String(int length){Random rdm = new Random();String hash1 = Integer.toHexString(rdm.nextInt());String capstr = hash1.substring(0, length);return capstr;}
}写接口
/*** 获取验证码** @param user* @return*/@Overridepublic R<String> sendMsg(User user, HttpSession session) {//获取手机号String phone = user.getPhone();if (StringUtils.hasText(phone)) {//生成 随机的4位验证码String code = ValidateCodeUtils.generateValidateCode(4).toString();log.info("code={}" + code);//调用阿里云提供的短信服务API 完成发送短信//参数分别是signName, templateCode, phoneNumbers, paramSMSUtils.sendMessage("阿里云短信测试","SMS_154123456",phone,code);//需要将生成的验证码 保存到??token中session.setAttribute(phone, code);return R.success("手机验证码短信发送成功");}return R.error("手机验证码短信发送失败");}
}

点 上图的 蓝色按钮 调用API发送短信测试一下

输入 之前你绑定的 测试手机号 ,点发起调用。
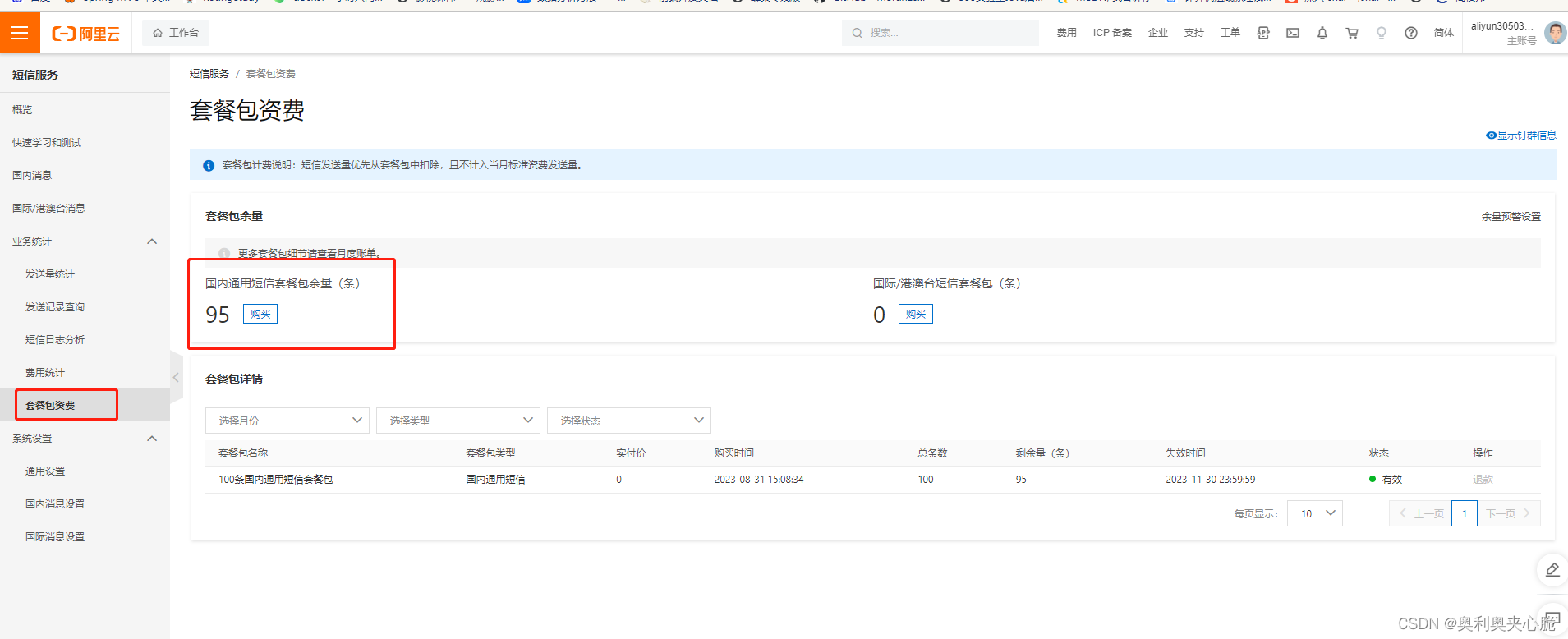
应该没反应,要买短信套餐,是免费的100条短信
再回到 蓝色按钮 调用API发送短信测试一下,收到短信测试成功