买域名和服务器做自己的网站seo免费视频教程
文章目录
- 前言
- 一、什么是多态
- 二、如何实现多态
- 三、代码讲解
- 四、静态联编,动态联编
- 总结
前言
在C++编程中,多态性(Polymorphism)是一种重要的概念,它允许基于对象的实际类型来调用不同的函数。多态性提供了灵活性和可扩展性,使得代码更易于维护和扩展。
一、什么是多态
多态性的定义:
多态性是一种面向对象编程的特性,它允许使用基类的指针或引用来调用派生类对象的特定成员函数。多态性能够在编译时或运行时确定函数的调用,从而实现不同的行为。
例如:
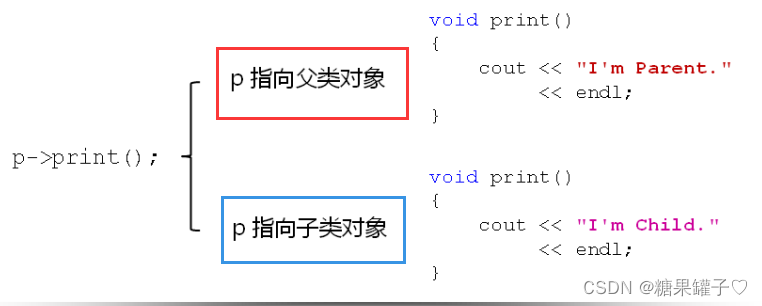
定义一个基类的 指针 p , 基类 和 子类的都定义有 print() 函数。当 p 指向一个父类的对象时,会调用父类的 print 函数;当 p 指向一个 子类对象时, 会调用 子类的 print 函数。(如下图)
注意:
这里 的 两个 print 函数并不是 函数重载,因为 函数重载要发生在同一个作用域内。这 属于函数重写。
二、如何实现多态
C++ 语言 直接支持多态的概念。
- 通过使用
virtual关键字 对多态进行支持。 - 被 virtual 声明的函数被重写后具有多态特性。
- 被 virtual 声明的函数叫做
虚函数。
class Base {
public:virtual void display() // virtual 虚函数{cout << "Base class display function" << endl;}
};
如果一个基类中有虚函数,说明 它可能被继承。子类中可能重新定义了 该函数的新用法。
三、代码讲解
下面代码中 ,父类 和 子类中 都定义了 print 函数。当 父类指针 指向不同的对象时,会根据实际的对象类型决定函数的具体目标。
class Parent // 父类 (基类)
{
public:virtual void print() // 虚函数{ printf("I'm parent.\n");}
};class Child : public Parent // 继承 Parent 的子类
{
public:void print() //重定义 该函数的新用法{printf("I'm Child\n");}
};void to_printf(Parent* p) // 参数为 父类指针,用于指向 父类/子类对象
{p->print();
}int main(void)
{Parent p1;Child c1;to_printf(&p1); //指向 父类对象,调用父类的 print 函数to_printf(&c1); //指向 子类对象,调用子类的 print 函数return 0;
}
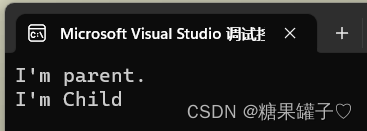
当调用 print 函数时, 同样的调用语句 在实际运行时有多种不同的表现形态,体现了多态性。
注意:
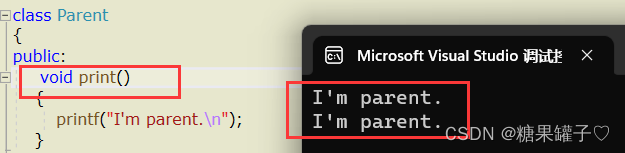
如果,没有 加上 关键字 virtual ,则两次都会调用 父类的函数。因为 编译器不知道指针 p 究竟指向了什么,为了更安全,编译器就直接调用了父类的函数,赋值兼容性。
四、静态联编,动态联编
理论的概念:
静态联编: 在程序的编译期间就能确定具体的函数调用。
如: 函数重载。
动态联编: 在程序运行后才能确定具体的函数调用。
如:函数重写。
总结
多态性 是 C++ 编程中一个重要且强大的概念。通过使用虚函数和函数重写,我们可以实现多态性,从而提高代码的可维护性、可扩展性和灵活性。在编写代码时,我们应该充分利用多态性的优势,并遵循良好的面向对象设计原则来正确使用多态性。