做网络营销如何建立自己的网站永川区网站建设咨询
高速PCB板布线过程中,经常遇到等长设置问题,例如DDR的一组数据线和地址线等。但是由于数据线和地址线中间有一个电阻(或排阻),这种情况下设置等长就要引入Xnet的概念,通过设置Xnet的等长来确保数据线和地址线的等长。
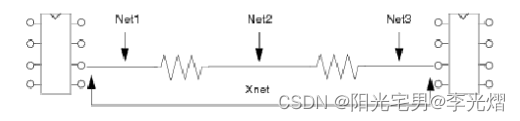
由无源、分立器件(电阻、电容、电感)连接起来的几段网络的组合称为Xnet,如下图所示两个芯片的管脚之间连接了两个电阻,分成三个Net网络,Xnet的定义就是三个网络加电阻整合成的一个网络。
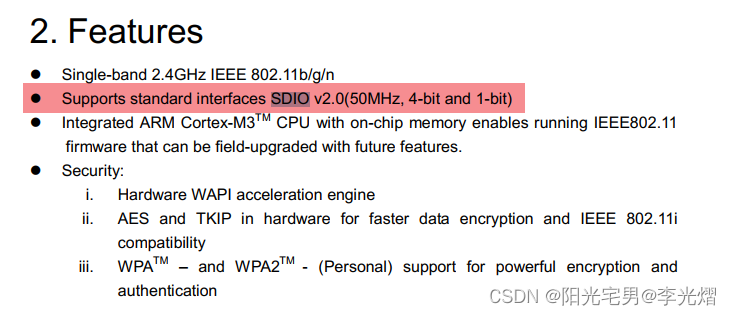
以WIFI芯片为例,如下所示为WIFI芯片规格书为SDIO通信,速率能跑到50MHz.
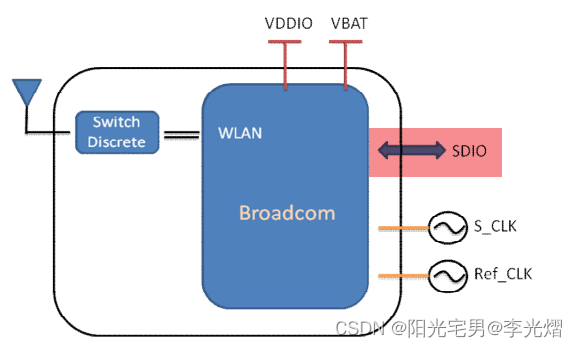
走线规则为SDIO走线长度等长及平行,并且避免靠近电源或CLK布线。