彩票网站开发系统如何搭建长沙有哪些大型工厂
利用 OCR 和强大的 GPT-4o 迷你模型对收据进行信息提取
利用 OCR 和强大的 GPT-4o 迷你模型对收据进行信息提取
欢迎来到雲闪世界。,我将向您展示如何从收据中提取信息,并提供收据的简单图像。首先,我们将利用 OCR 从收据中提取信息。然后,此信息将发送到 GPT-4o 迷你模型进行信息提取。我在这个项目中的目标是开发一个应用程序,只需拍摄收据图像并选择哪些物品属于哪个人,它就可以帮助朋友分摊账单。本文将重点介绍此目标的信息提取部分。

动机
例如,在去餐馆后,查看收据并计算每个人的份额是一件麻烦事。我多次遇到过这个问题,因此想要一个解决方案来使这个过程更有效。因此我想到了BillSplitter应用程序。这个想法是,用户可以拍摄收据的图像,应用程序将利用 OCR 和语言模型来处理收据并提取每个项目及其相应的价格,用户可以简单地选择哪个人应该为哪个项目付款。最终,用户会收到每个人欠款金额的概览。本文将介绍如何开发此应用程序的收据处理部分,而前端部分将留待另一篇文章。这意味着本文将假设您有一张收据的图像,目标是从收据中提取每个项目及其在列表中的相应价格。稍后,可以开发一个前端应用程序来利用我们将在本文中开发的内容。
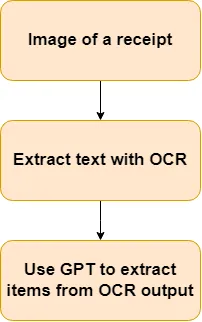
从收据中提取文本
首先,可以使用 OCR 引擎提取收据中的文本。开源 OCR 引擎不计其数,但本项目将使用EasyOCR,因为它高效且易于使用。
首先,您必须导入所需的包:
import easyocr
import cv2
import matplotlib.pyplot as plt
import requests
import torch
import pytesseract
from PIL import Image
import json
import numpy as np您可以使用 pip 安装。请注意,要在 GPU 上运行 EasyOCR(强烈推荐,因为它可以节省大量时间),我必须使用以下命令在 GPU 上明确安装 PyTorch:
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118我在 Windows 和 CUDA 11.8 上使用了它,但如果您使用其他操作系统或 CUDA 版本,正确的命令在PyTorch 网站上。
然后我拍了一些收据的图片。您可以使用自己的收据,但如果您不愿意,也可以使用我在Google Drive上的收据,这些收据来自挪威超市。我将包含收据图片的文件夹命名为ReceiptData,并使用以下命令将图片路径加载到变量中:
img_path1 = "ReceiptData/20231016_180324.jpg""ReceiptData/20231016_180324.jpg"
img_path2 = "ReceiptData/20231010_210904.jpg"
img_path3 = "ReceiptData/20231014_182753.jpg"
img_path4 = "ReceiptData/20230917_131726.jpg"
img_path5 = "ReceiptData/20231002_190427.jpg"我还喜欢为我正在使用的收据设置一个变量,以便于阅读和轻松更改收据。
PATH_TO_USE = img_path2要加载 EasyOCR,您可以使用下面的代码行。请注意,如果您正在阅读不同语言的文本,您可以将no更改为您想要的语言(例如en表示英语)。您可以在此网站上找到所有可用语言及其代码名称的列表。此外,如果您不使用 GPU,您可以设置 gpu=False。
reader = easyocr.Reader(['no'], gpu=True) # this needs to run only once to load the model into memory'no'], gpu=True) # this needs to run only once to load the model into memory然后我读取图像,将其转换为灰度以提高 OCR 性能,并运行 OCR。此外,我还将 OCR 输出合并为一个字符串。
img = cv2.imread(PATH_TO_USE)
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
result = reader.readtext(img, detail=0)0)result_string = ""
for ele in result:result_string += ele + " "如果您想查看收据,您可以这样做:
cv2.namedWindow('img', cv2.WINDOW_NORMAL)'img', cv2.WINDOW_NORMAL)
cv2.imshow("img", img)
cv2.waitKey(0)
cv2.destroyAllWindows()恭喜,您现在已经成功从收据中提取了文本。请注意,某些 OCR 输出可能看起来像是无意义的,例如,一张收据的 OCR 输出开头看起来像:Al rema 10@@ Salaskvittering REMA 1ooo GausdAL,这自然不是最佳的。发生这种情况的原因有很多,但主要原因是收据中的文本非常小,这使得 OCR 难以辨认出所有字符。不过,正如您将在本文后面看到的那样,OCR 足够有效,可以成功从收据中提取项目。但应该注意的是,提高 OCR 质量应该是未来工作的重点。
使用 GPT-4o mini 提取信息
我花了很多时间尝试使用 Python 逻辑、正则表达式和类似方法从收据中提取信息。然而,这些方法的问题在于它们难以处理 OCR 输出的各种输出。然而,像 GPT-4o mini 这样的大型语言模型彻底改变了这一过程,既能够处理不同的输入,又能输出结构化的响应。这使得大型语言模型非常适合我们想要在这里实现的任务,即从收据的 OCR 输出中提取商品和价格。在本文中,我将使用 GPT-4o mini,尽管在这种情况下也可以使用许多其他 LLM。
首先,你应该登录或创建一个OpenAI帐户。这将为你提供访问 OpenAI API 所需的 API 密钥。你还必须输入付款方式来支付 API 请求。我建议尽快对你的账户设置消费限额,因为人们很容易开始花很多钱。然而,在收据数据上使用 GPT-4o mini 相当便宜,你可以在OpenAI 的网站上全面了解定价。
然后,您应该安全地存储 API。有几种方法可以做到这一点,但我只需创建一个如下所示的 constants.py 文件:
OPEN_AI_API_KEY = "123123123""123123123"然后,您可以使用以下代码将密钥导入到单独的文件中:
from constants import OPEN_AI_API_KEY
OPEN_AI_API_KEY = str(OPEN_AI_API_KEY)
assert OPEN_AI_API_KEY.startswith("sk-") and OPEN_AI_API_KEY.endswith("123")
client = OpenAI(api_key=OPEN_AI_API_KEY)请记住替换断言中的两个字符串以匹配您的 API 密钥。此断言语句可确保您使用的是正确的 API 密钥。
然后,您可以创建一个 OpenAI 客户端来使用以下命令发出 API 请求:
from openai import OpenAI
import os
client = OpenAI(api_key=OPEN_AI_API_KEY)您可以使用以下方式发送 API 请求:
MODEL = "gpt-4o-mini""gpt-4o-mini"def prompt_gpt(prompt):return client.chat.completions.create(model=MODEL,messages=[{"role": "system", "content": "You are a helpful assistant."},{"role": "user", "content": prompt}]).choices[0].message.content然后,我使用下面的代码创建一个提示。很难找到一个有效的提示,在处理这个问题时,我特别纠结于 GPT-4o mini 提供的过长的答案。为了解决这个问题,我添加了两个句子,只用列表来回答,没有其他内容,当然,这是物品和价格的清单。最后一部分很有趣,因为我在提示本身中包含了响应的开头,我读到这可以帮助避免 LLM 过长的解释,而在这种情况下,这是不希望的。
prompt = f"Given a string of text from an OCR of a receipt. Find each item and price in the receipt, and return with a list of tuples like this: [(item1, price1), (item2, price2), ...]. Only respond with the list, and nothing else. The string is: {result_string}""Given a string of text from an OCR of a receipt. Find each item and price in the receipt, and return with a list of tuples like this: [(item1, price1), (item2, price2), ...]. Only respond with the list, and nothing else. The string is: {result_string}"
prompt += " . Sure, here is the list of items and prices: " 然后你可以使用以下命令提示 GPT-4o mini:
response = prompt_gpt(prompt)以下是我收到的一些回复示例:
# for image 'ReceiptData/20231010_210904.jpg'
[("KylLING HotwiNGS", "57,00"), ("Iskaffe Hocca", "18,90"), ("TORTILLACHIP ZINGY", "16,90"), ("SøTPOTeT FRIES", "37,00"), ("Creamy PEANøTTSHeR", "46,00"), ("GluTEn FReE TORT", "43,90"), ("DIP TEX MEX STyLE", "40,90")]# for image 'ReceiptData/20231016_180324.jpg'
[('RISTO HOZZA _ 2PK', 89.90), ('SUPERHEL T , GROYBRøP', 35.00), ('B#REPOSE', 25.00), ('Dr Oetker', 26.97)]# for image 'ReceiptData/20231002_190427.jpg'
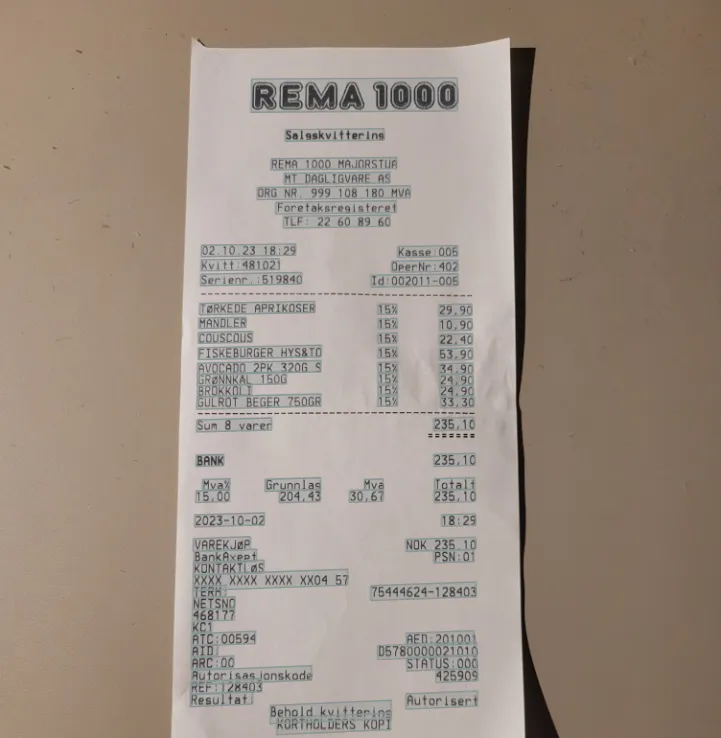
[('TøRKEDE APRIKOSER', 29.90), ('MANDLER', 10.90), ('Couscous', 22.40), ('FISKEBURGER HYS8TO', 53.90), ('AVOCADO 2PK', 40.00), ('GRøNNKÅL', 0.00), ('BROKKOLI', 0.00), ('GULROT BEGER 75OGR', 3.00)]审查结果
设置好所有代码以从收据中提取信息后,是时候检查一下该方法的效果了。我将使用定性方法,逐一查看一些收据,以判断信息提取的效果。我将检查上面显示的 3 张输出图像。
第一张收据

对于这张收据,您可以看到信息提取管道能够使用正确的流程提取所有项目。我认为这非常令人印象深刻,因为图像不是非常清晰,并且图像中有很多不属于收据的背景。不幸的是,物品名称中有一些拼写错误,但我认为在这种情况下这是可以接受的,因为您仍然可以轻松了解它是什么物品。
第二张收据
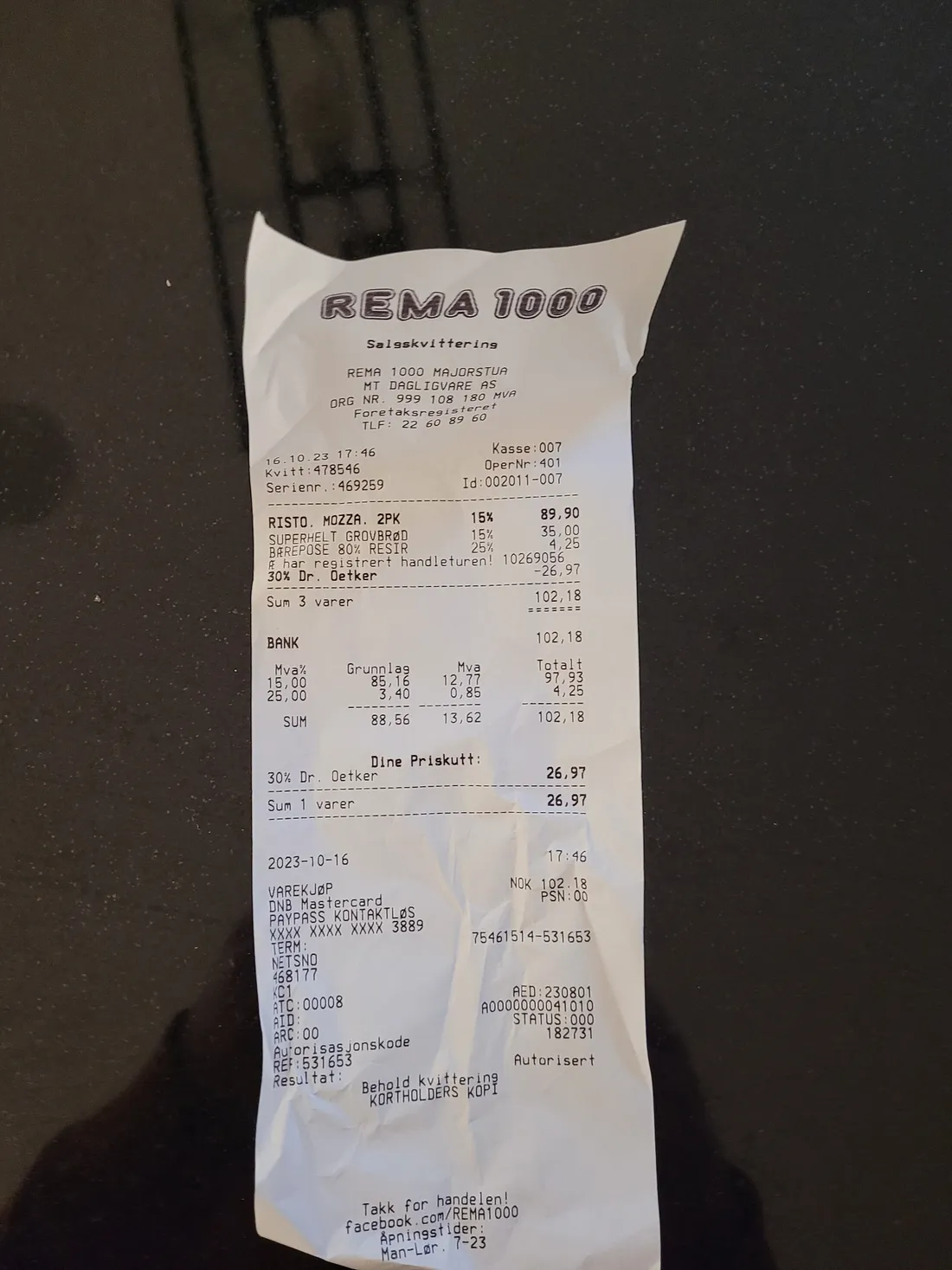
在这张收据上,信息提取管道遇到了困难。前两个商品和价格是正确的,但模型给出了bærepose的错误价格(发生这种情况是因为 OCR 无法为商品选择正确的价格),这让 LLM 感到困惑。收据商品部分的最后一行是第一件商品的折扣,LLM 无法理解,并错误地输出这是一件单独的商品。我认为这是可以接受的;但是,因为模型很难理解最后一行是另一件商品的折扣,而不是商品本身。
第三张收据
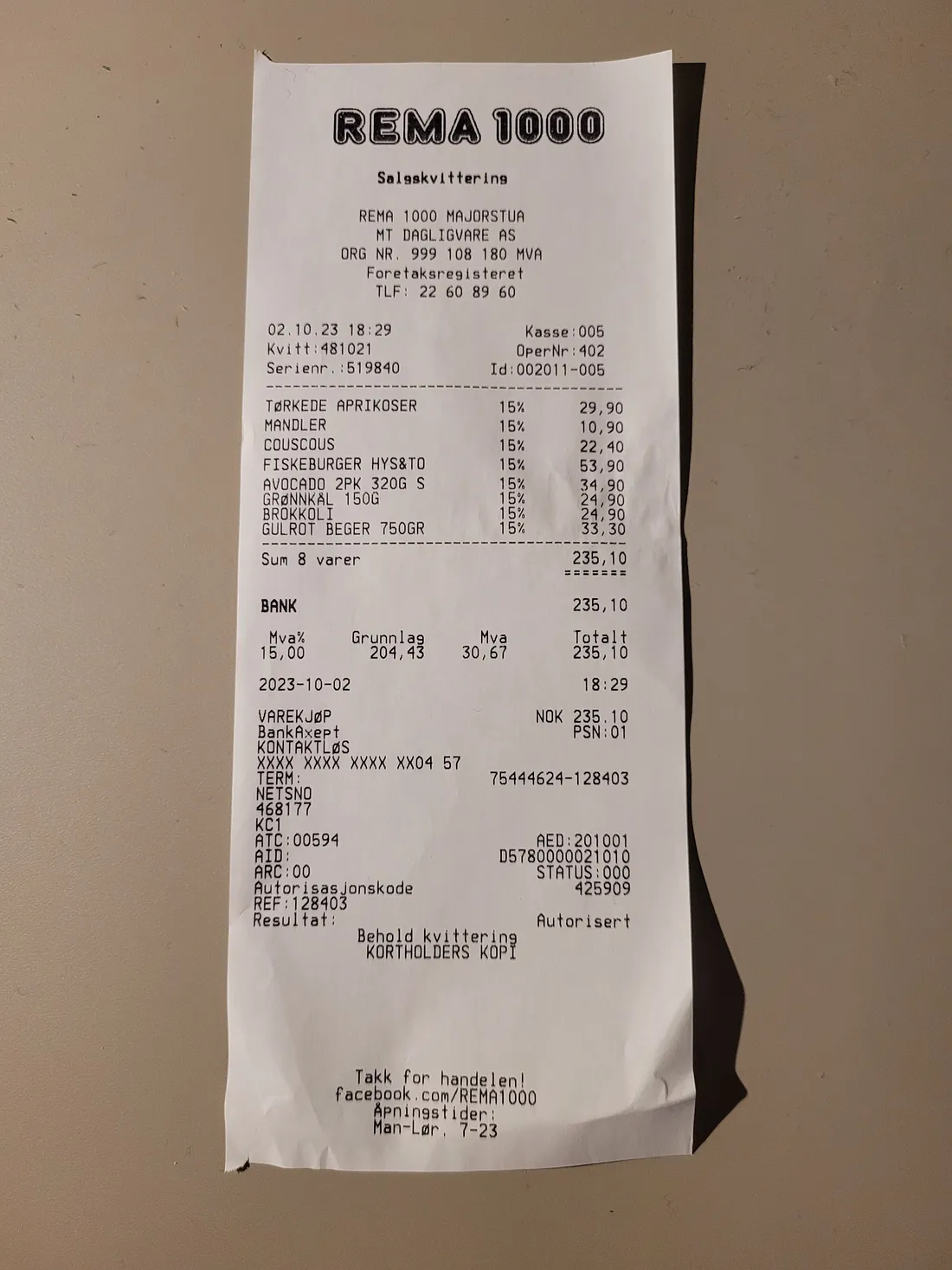
对于这张收据的前四项,管道表现非常好,但不幸的是,对于剩下的四项,管道却失败了。考虑到图像更清晰,背景噪音更少,这张收据应该比前两张收据更容易,但不幸的是,实际情况并非如此。我查看了这张收据的 OCR 输出,以了解错误来自何处。前四项的输出清晰正确,而模型突然对后四项失败,这表明不正确的 OCR 输出可能会给 GPT-4o mini 带来严重问题。
了解如何改进管道
为了改进管道,我们必须了解它的弱点。如前所述,问题似乎出在 OCR 上。为了进一步研究这个问题,我们将更深入地研究 OCR 输出。EasyOCR 中的 OCR 包含两个步骤。第一步称为文本检测,它检测图像中存在文本的区域。这是通过使用边界框标记带有文本的区域来完成的。第二步称为文本识别,给定一个包含文本的边界框,它将输出边界框中存在的文本。因此,本文中实现的信息提取管道的问题可能出在两个步骤之一上。
首先,我们研究文本识别,通过打印出 OCR 找到的边界框来实现。您可以使用以下代码执行此操作。首先,运行 OCR 并让函数也返回边界框(通过设置 detail=1 而不是像我们之前所做的那样设置 detail=0 来实现)
result2 = reader.readtext(img, detail=1)1)然后,您可以使用以下命令打印出图像的边界框:
# Loop through the results and draw bounding boxes on the original image
for (bbox, text, prob) in result2:top_left = tuple(bbox[0])bottom_right = tuple(bbox[2])# Draw the bounding box on the original imagecv2.rectangle(img, top_left, bottom_right, (0, 255, 0), 2) # Green box with thickness 2# Optionally, put the recognized text on the original imagecv2.putText(img, text, (top_left[0], top_left[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 255, 0), 2)# Now resize the image to a smaller sizescale_percent = 20 # percent of original size
width = int(img.shape[1] * scale_percent / 100)
height = int(img.shape[0] * scale_percent / 100)
dim = (width, height)# Resize the image
resized_img = cv2.resize(img, dim, interpolation=cv2.INTER_AREA)# Save or display the resized image with bounding boxes
cv2.imwrite('output_image_with_boxes.jpg', resized_img)
cv2.imshow('Resized Image with Bounding Boxes', resized_img)
cv2.waitKey(0)
cv2.destroyAllWindows()对于第三张收据,返回了下面的收据。您可以看到模型很难读取最后四件商品的价格。这导致文本识别步骤表现不佳,进而导致 GPT-4o mini 难以对收据上的商品和价格做出准确的响应。
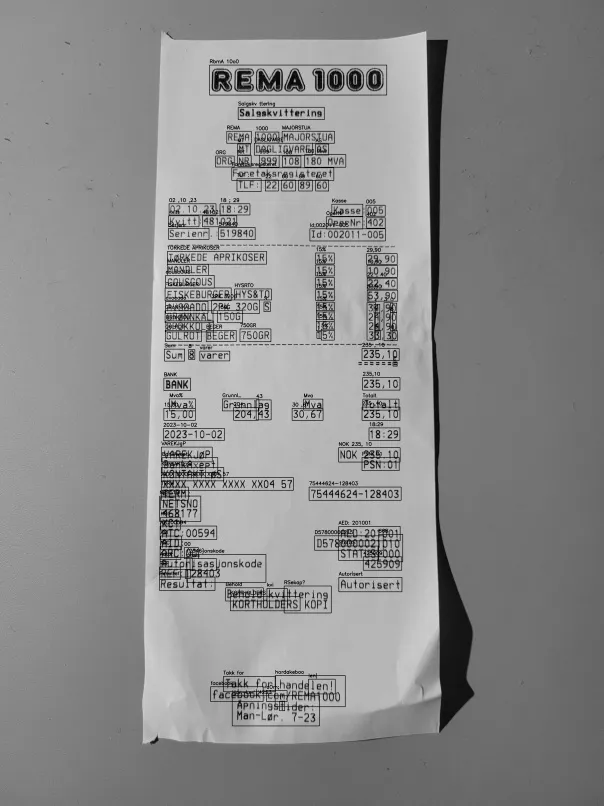
添加图片注释,不超过 140 字(可选)
如果对第二张收据重复上述步骤,就会发现同样的问题。
解决这个问题主要有两种方法。第一步是拍摄更清晰的收据照片,使 OCR 更容易读取文本。但是,我认为第三张收据的图像非常清晰,OCR 应该能够读取它。另一种主要方法是改进 OCR,要么使用不同的 OCR 引擎(例如,PaddleOCR、Tesseract或付费 OCR 服务,如AWS Textract),要么通过微调 OCR,正如我在关于微调 EasyOCR 的文本识别部分的文章中展示的那样。请注意,在从事这个项目时,我尝试了 PaddleOCR 和 Tesseract,它们的表现都比 EasyOCR 差。
最后,我还测试了 Amazon Textract 选项以查看其有效性。以下是第二张收据的结果,您可以看到 Amazon Textract 基本上完美地定位了所有文本,使其成为从收据中提取文本的非常有效的选项。在下一节中,我将在管道中实施 AWS Textract,以查看应用程序的运行情况。
添加图片注释,不超过 140 字(可选)
使用 Textract 测试改进的解决方案
为了了解从收据中提取信息的效果如何,我将使用 AWS Textract 而不是 EasyOCR 进行 OCR。通常,我更愿意在本地使用 OCR,因为这样我可以更好地控制流程,而且使用 AI 的乐趣之一就是自己处理模型,而不仅仅是调用 API。但是,我想看看付费 OCR API 服务在这种情况下的效果如何。使用 AWS Textract 需要设置一个 AWS 账户,以便拥有访问密钥来调用 Textract API。请注意,AWS 的初始设置可能有点繁琐,主要是出于安全原因,但我向您保证,正确设置它非常值得您花时间。这是因为您将学习如何设置 AWS(一种流行的云提供商),并确保密钥的安全,这是一项需要维护的重要做法,特别是如果您开发的应用程序有很多用户。我不会在这里提供有关设置帐户的教程,但 AWS 已经为这个过程编写了一些高质量的文档,并且那里还有大量关于该主题的其他文章。
Textract 服务也相当便宜,撰写本文时的价格为每月前 100 万页 1.5 美元/1000 页,每月超过 100 万页 0.6 美元/1000 页。如果您使用检测文档文本 API,您还可以通过 AWS 免费套餐每月获得 1000 页免费页面。
设置访问凭据后,您可以使用以下代码使用 Textract API。首先,导入一些内容。请注意,我将凭据存储在名为 constants.py 的单独文件中。
import boto3
from io import BytesIO
from constants import AWS_ACCESS_KEY_ID, AWS_SECRET_ACCESS_KEY, AWS_REGION
import os然后,您必须创建一个客户端来调用 API。
def get_aws_textract_client():return boto3.client('textract',aws_access_key_id=AWS_ACCESS_KEY_ID,aws_secret_access_key=AWS_SECRET_ACCESS_KEY,region_name=AWS_REGION)然后我使用以下函数来调用 API。
def get_textract_text_from_image(client, image_path):assert os.path.exists(image_path), f"Image file not found: {image_path}"with open(image_path, 'rb') as document:img = bytearray(document.read())# Call Amazon Textractresponse = client.detect_document_text(Document={'Bytes': img})return responsedef extract_text_from_response(response):result_string = ""for block in response["Blocks"]:if block["BlockType"] == "WORD" or block["BlockType"] == "LINE":result_string += block["Text"] + " "return result_string我使用以下几行调用这两个函数
response = get_textract_text_from_image(client, PATH_TO_USE)
result_string = extract_text_from_response(response)然后,我对第三张收据运行此操作,并使用提取的文本提示 GPT-4o mini,结果如下:
[('TORKEDE APRIKOSER', 29.90), ('MANDLER', 10.90), ('COUSCOUS', 22.40), ('FISKEBURGER HYS&TO', 53.90), ('AVOCADO 2PK 320G', 34.90), ('GRONNKAL 150G', 24.90), ('BROKKOLI', 24.90), ('GULROT BEGER 750GR', 24.90)]'TORKEDE APRIKOSER', 29.90), ('MANDLER', 10.90), ('COUSCOUS', 22.40), ('FISKEBURGER HYS&TO', 53.90), ('AVOCADO 2PK 320G', 34.90), ('GRONNKAL 150G', 24.90), ('BROKKOLI', 24.90), ('GULROT BEGER 750GR', 24.90)]如您所见,AWS Textract 和 GPT-4o mini 可以从收据中提取所有价格正确的商品,但最后一项商品的价格不正确。我也对第二张收据进行了尝试,结果得到了以下响应:
[('RISTO. MOZZA. 2PK 15%', 89.90), ('SUPERHELT GROVBROD 15%', 35.00), ('BAREPOSE 80% RESIR 25%', 4.25), ('30% Dr. Oetker', -26.97)]'RISTO. MOZZA. 2PK 15%', 89.90), ('SUPERHELT GROVBROD 15%', 35.00), ('BAREPOSE 80% RESIR 25%', 4.25), ('30% Dr. Oetker', -26.97)]在这种情况下,AWS Textract 和 GPT-4o mini 可以完美地提取所有商品和价格。请注意,GPT-4o mini 返回的最后一件商品的价格为负数,我认为这是可以接受的,应该在应用程序的前端处理。
结论
在本文中,我向您展示了如何开发信息提取管道以从收据中检索商品和价格。我们首先实施 EasyOCR 从收据中提取文本,然后使用 GPT-4o mini 根据 OCR 输出提供商品和价格。然后,我们检查了三张单独收据的结果。检查显示,管道对某些商品表现良好,提取了正确的商品和价格,尽管商品名称有一些拼写错误。但是,管道对其他商品完全失败,这主要归因于 OCR 错误。除了 EasyOCR,我还测试了 Tesseract OCR 和 PaddleOCR,它们并没有为本文中的三张收据提供更好的结果。AWS Textract 被设置为处理 OCR 错误,它提供的结果比 EasyOCR、Tesseract 和 PaddleOCR 好得多。使用 AWS Textract 和 GPT-4o mini 的组合,我们能够非常准确地从收据中导出商品和价格。
感谢关注雲闪世界。(Aws解决方案架构师vs开发人员&GCP解决方案架构师vs开发人员)