网站建设费属于宣传费网站开发专业简历
17. 电话号码的字母组合
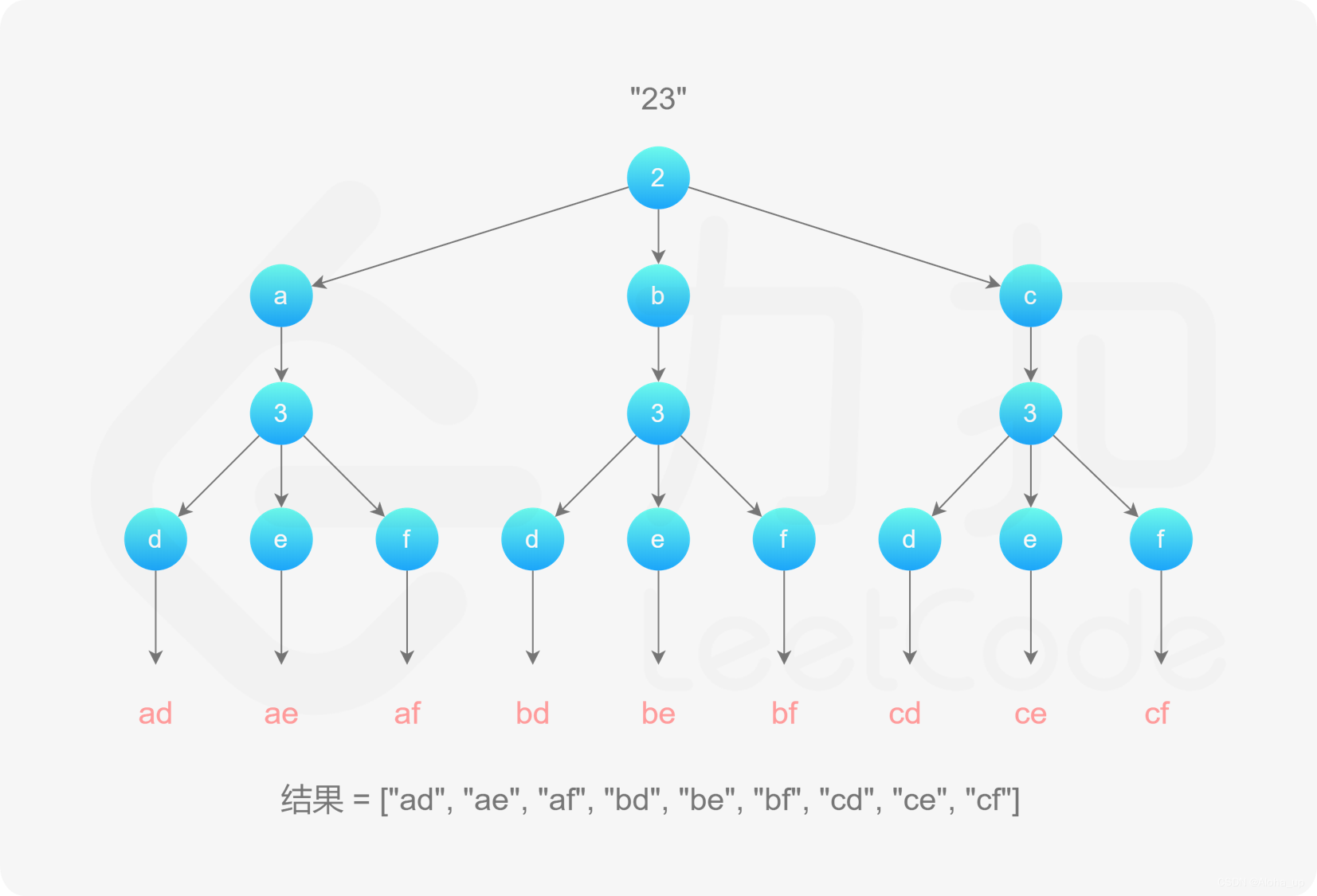
给定一个仅包含数字 2-9 的字符串,返回所有它能表示的字母组合。答案可以按 任意顺序 返回。给出数字到字母的映射如下(与电话按键相同)。注意 1 不对应任何字母。
不会,放IDEA里执行了一下大概理解了流程
直接看官方解法
class Solution {public List<String> letterCombinations(String digits) {List<String> combinations = new ArrayList<String>();if (digits.length() == 0) {return combinations;}Map<Character, String> phoneMap = new HashMap<Character, String>() {{put('2', "abc");put('3', "def");put('4', "ghi");put('5', "jkl");put('6', "mno");put('7', "pqrs");put('8', "tuv");put('9', "wxyz");}};backtrack(combinations, phoneMap, digits, 0, new StringBuffer());return combinations;}public void backtrack(List<String> combinations, Map<Character, String> phoneMap, String digits, int index, StringBuffer combination) {if (index == digits.length()) {combinations.add(combination.toString());} else {char digit = digits.charAt(index);String letters = phoneMap.get(digit);int lettersCount = letters.length();for (int i = 0; i < lettersCount; i++) {combination.append(letters.charAt(i));backtrack(combinations, phoneMap, digits, index + 1, combination);combination.deleteCharAt(index);}}}
}作者:力扣官方题解
链接:https://leetcode.cn/problems/letter-combinations-of-a-phone-number/solutions/388738/dian-hua-hao-ma-de-zi-mu-zu-he-by-leetcode-solutio/
来源:力扣(LeetCode)
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。