泰州做网站软件合肥做网站公司有哪些
deepin-terminal
安装
源里面自带了这个软件,可以直接装
sudo apt install deepin-terminal启动
按下Win键,输入deep即可快速检索出图标,点击启动
效果
分屏
Ctrl+Shift+H 水平分割
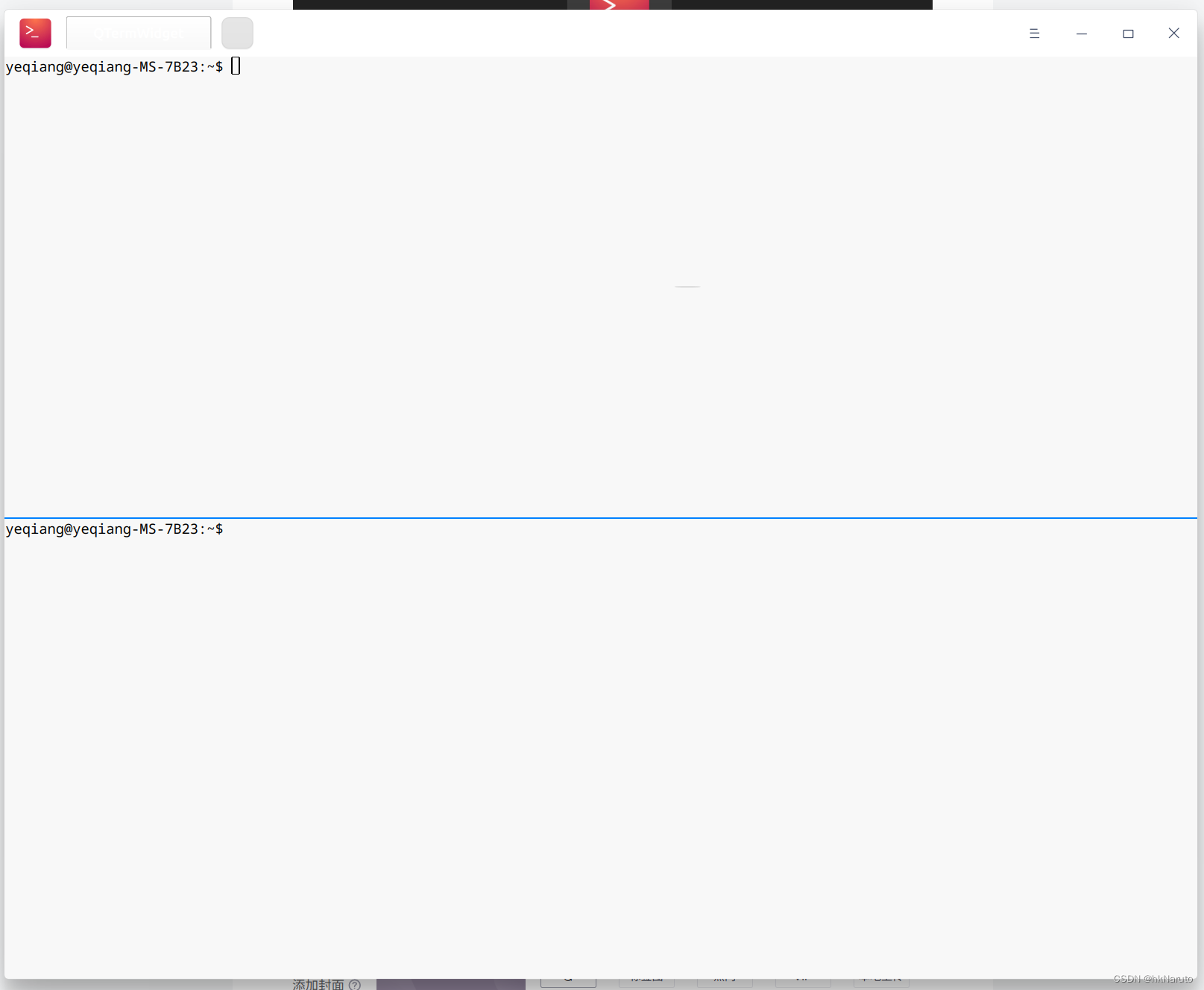
Ctrl+Shift+J 垂直分割
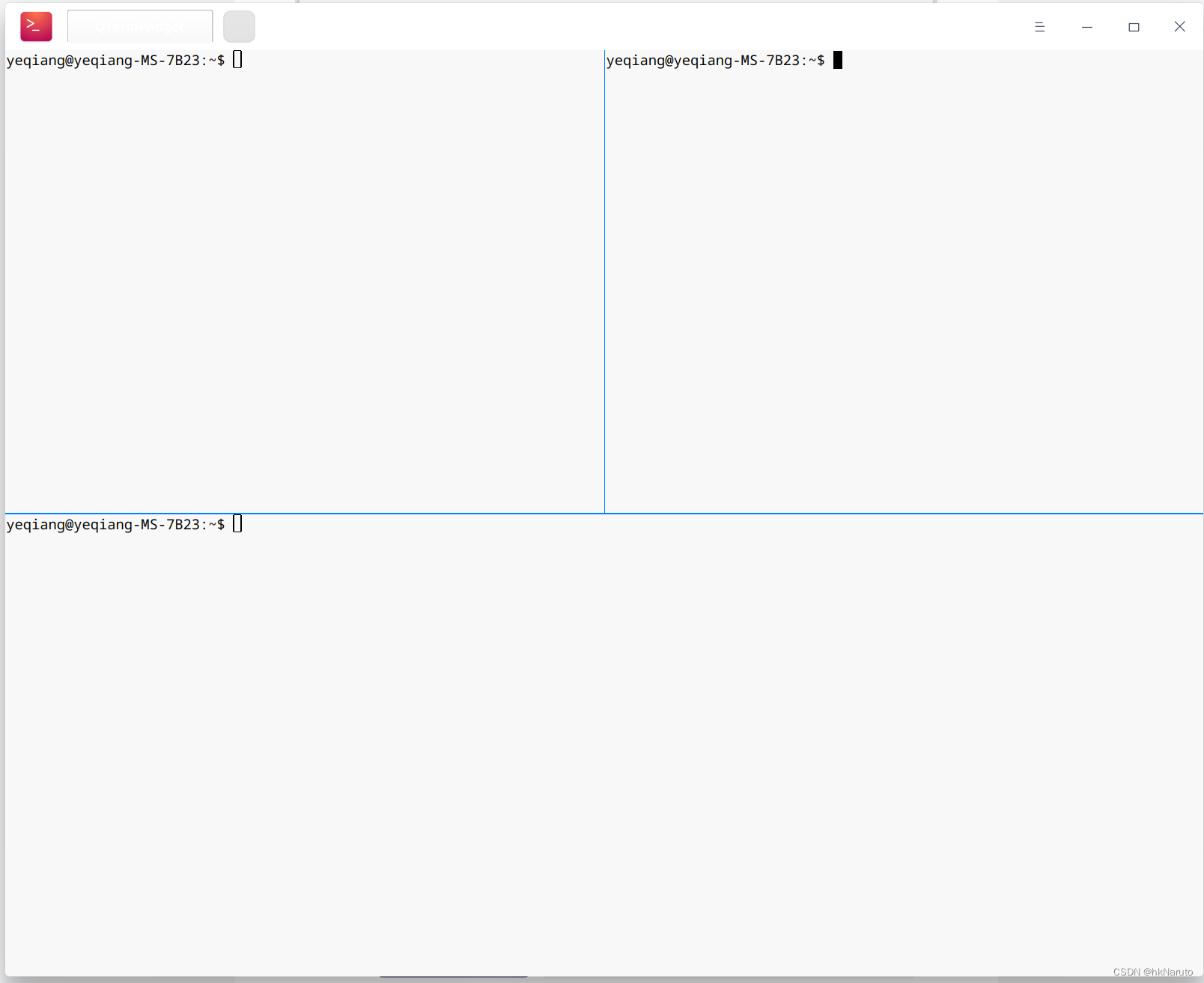
最多分割成四个小窗口,鼠标点击可以切换不同窗口
适配不好,背景颜色等都不能设置
源里面自带了这个软件,可以直接装
sudo apt install deepin-terminal按下Win键,输入deep即可快速检索出图标,点击启动
效果
最多分割成四个小窗口,鼠标点击可以切换不同窗口
适配不好,背景颜色等都不能设置