沈阳建站程序门户网站的含义

第241题
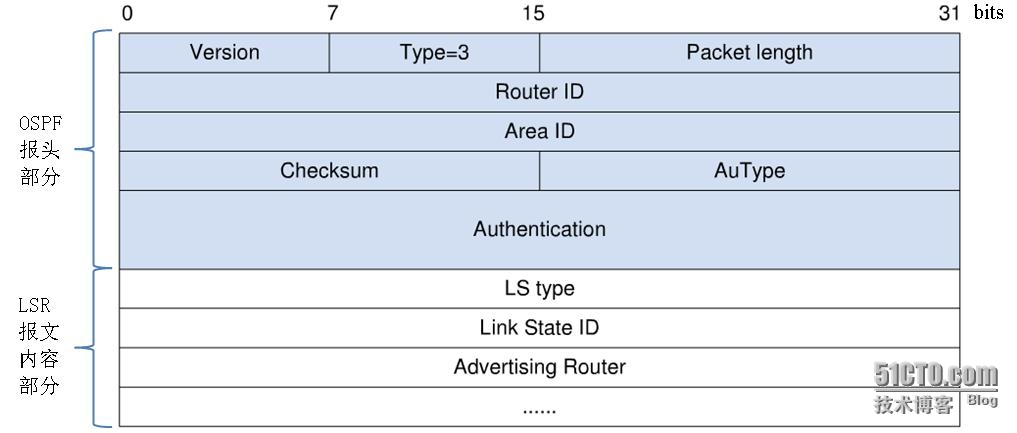
LS Request报文不包括以下哪一字段?
A、通告路由器(Advertising Router)
B、链路状态 ID (Link Srate ID)
C、数据库描述序列号(Database Dascription Sequence lumber)
D、链路状态类型 Link state type)
答案:C
解析:
LS Request 报文中包括以下字段:
- 通告路由器 (Advertising Router)
- 链路状态 ID (Link State ID)
- 链路状态类型 (Link State Type)
数据库描述序列号 (Database Description Sequence Number) 是在数据库描述报文 (DBD) 中使用的字段,而不是在 LS Request 报文中使用的。 LS Request 报文用于请求缺失的链路状态信息。
报文格式:
下图是wireshark中的抓包。