o2o网站建设怎么样网站怎么做站内美化
随着拼团模式的日益流行,越来越多的商家和消费者开始关注拼团小程序的制作。对于没有技术背景的普通人来说,制作一个拼团小程序似乎是一项艰巨的任务。但实际上,选择一个简单易用的第三方平台或工具,可以轻松完成拼团小程序的制作。本文将以乔拓云平台为例,介绍如何快速学会制作拼团小程序。
第一步:选择第三方平台或工具
乔拓云平台是一个简单易用的第三方平台,提供多种拼团模板,支持商家快速制作拼团小程序。在使用乔拓云平台之前,需要先安装相关的控件和插件,以便在编辑过程中使用。

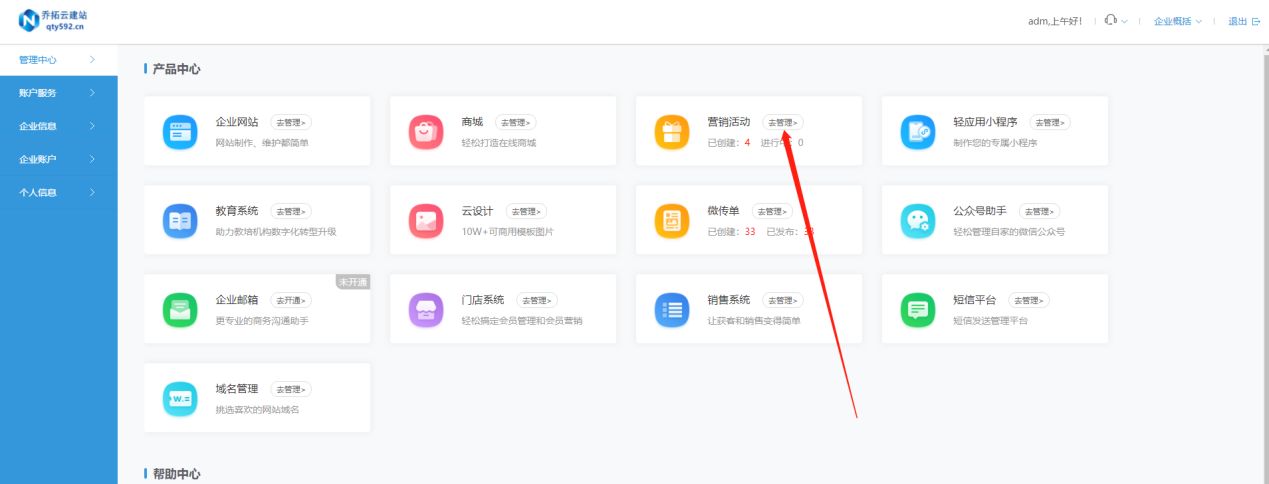
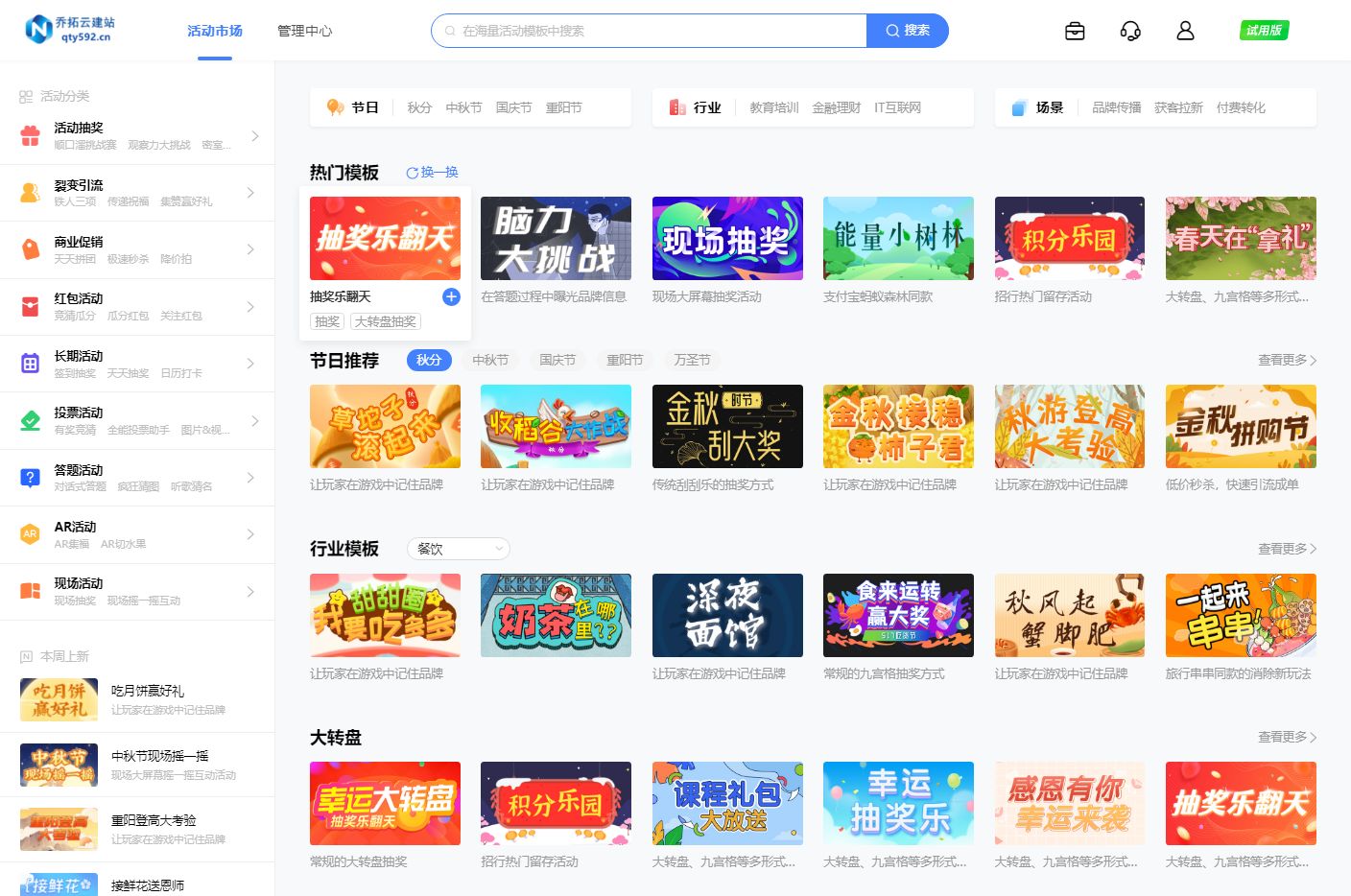
第二步:登录平台,进入活动市场页面
登录乔拓云平台后,进入活动市场页面。在这个页面上,可以在搜索框中输入关键词,例如“拼团”、“团购”等,找到适合自己的模板。也可以根据平台提供的分类进行筛选,找到符合自己需求的模板。
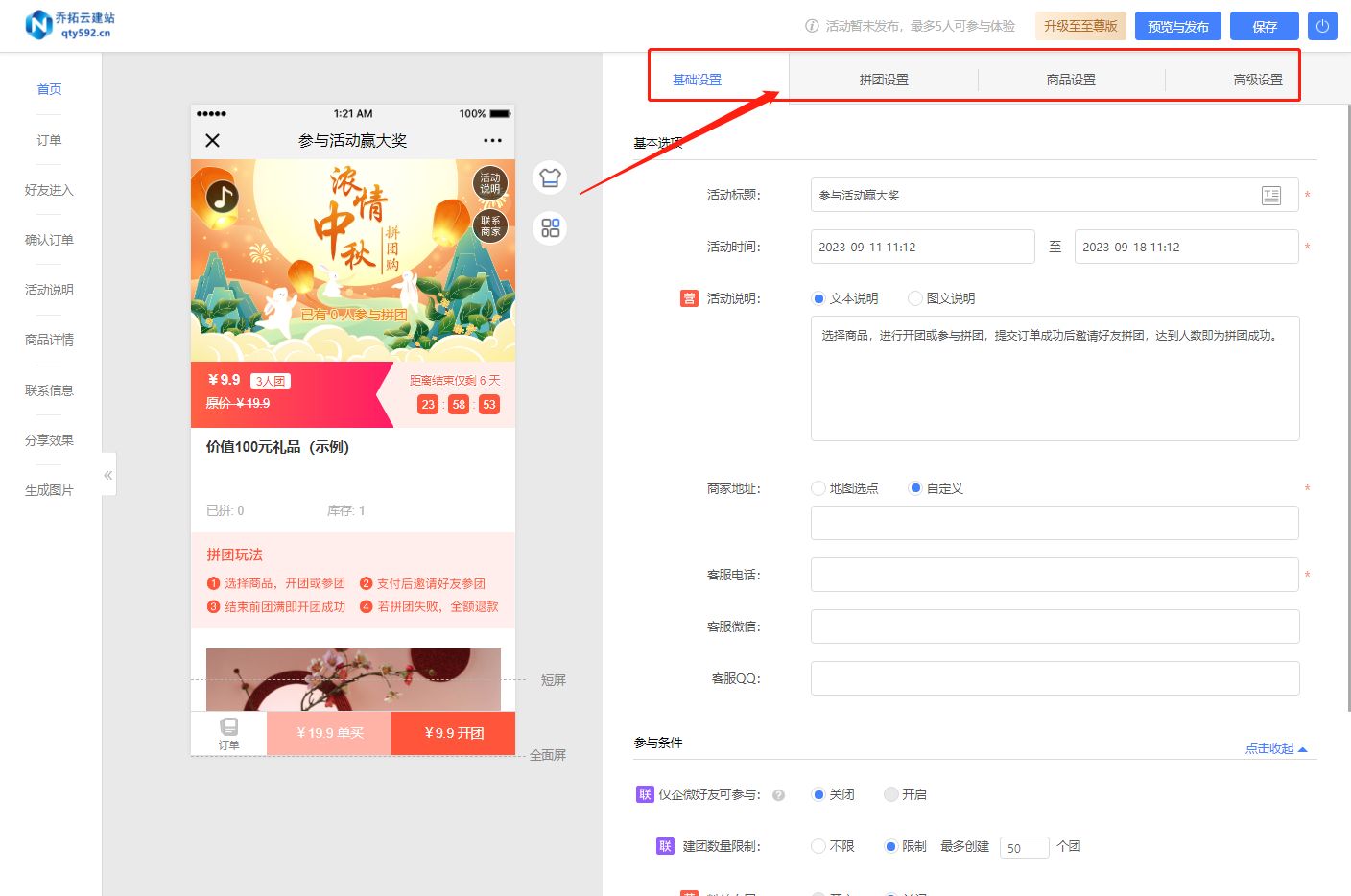
第三步:编辑和修改模板
在模板市场页面,可以点击“新建模板”按钮,进入编辑页面。在编辑页面上,可以对图片、文字、商品等内容进行添加和修改。乔拓云平台提供丰富的控件和模板,让商家可以自由发挥创意,制作出独特的拼团小程序。
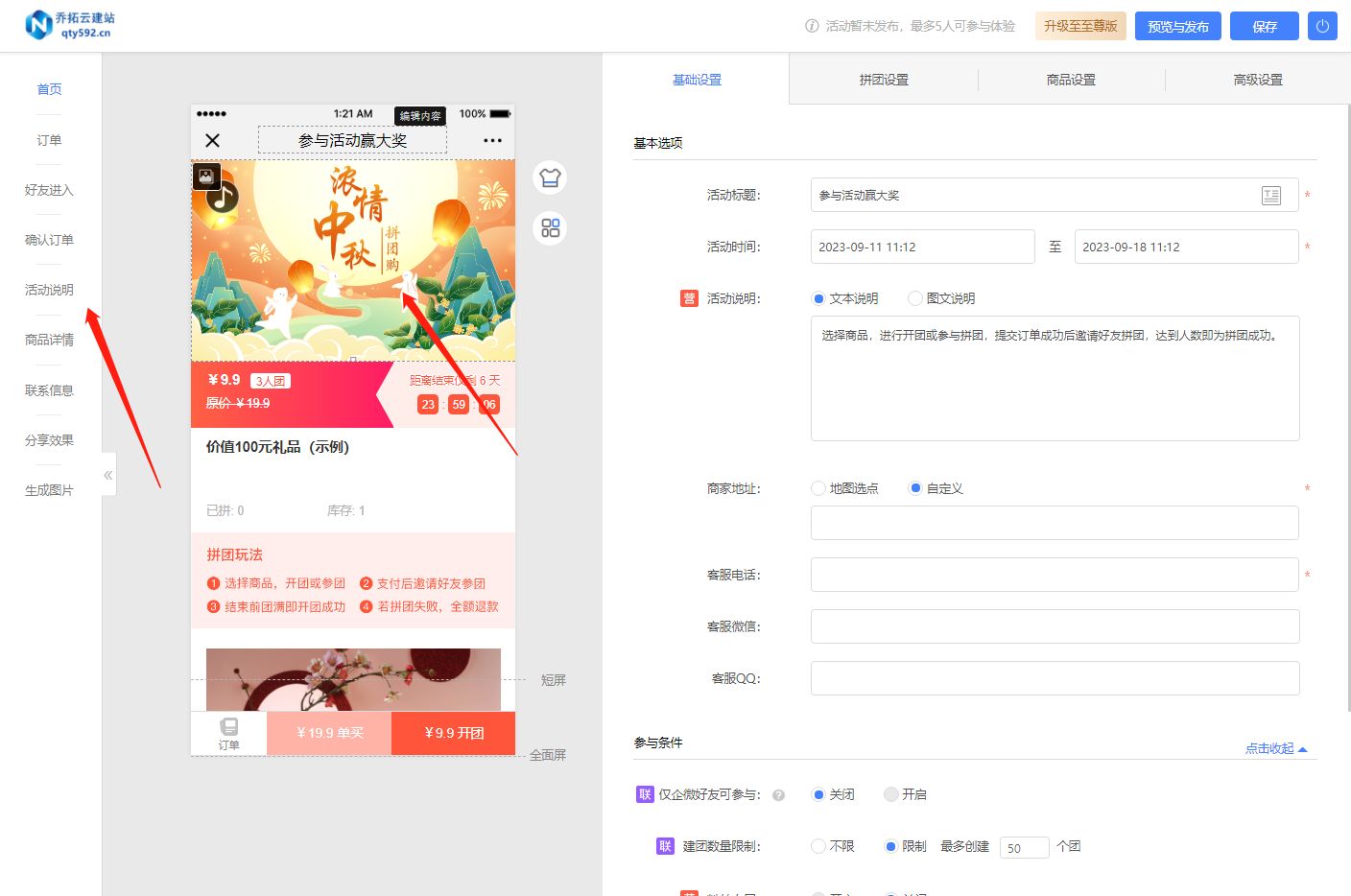
具体而言,商家可以根据自己的需求调整图片、文字的大小、颜色、位置等属性,同时可以添加商品信息、调整价格、选择不同的拼团规则等。在编辑过程中,商家还可以随时预览效果,以便确认无误后进行发布。
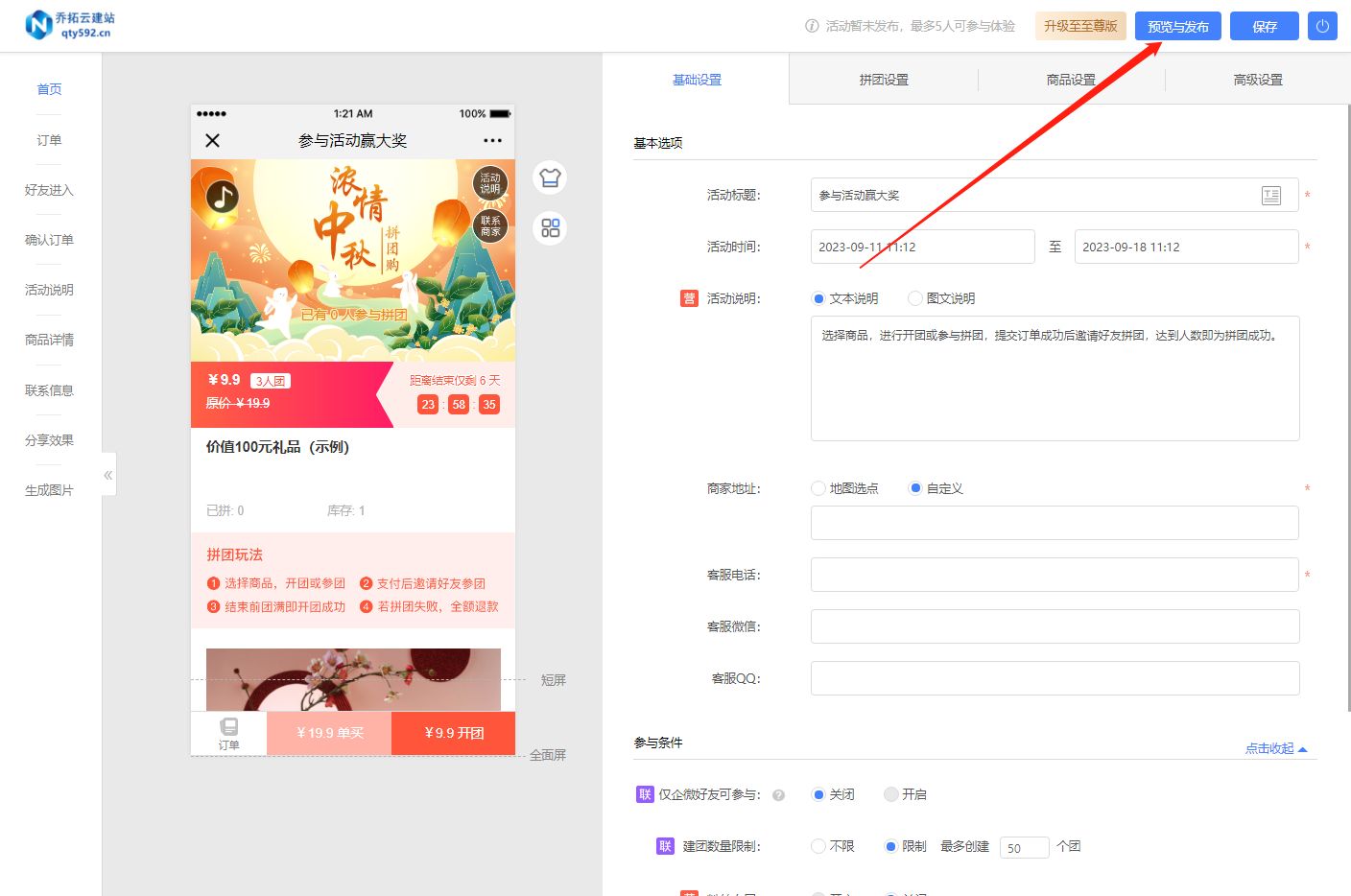
第四步:发布活动
完成编辑后,商家可以点击“发布活动”按钮,将拼团小程序上线。在发布之前,商家需要填写活动信息,如活动名称、活动时间、活动规则等。填写完成后,即可发布活动。
总结:
制作拼团小程序并不难,只需要选择一个简单易用的第三方平台或工具,如乔拓云平台,然后登录平台,搜索合适的模板,对模板进行编辑和修改,最后发布活动即可。通过这种方式,商家可以快速制作出符合自己需求的拼团小程序,提高销售业绩。