响应式网络网站源码哈尔滨做网站哪家便宜
目录
数据库开发-MySQL
前言
1. MySQL概述
1.1 安装
1.2 数据模型
1.3 SQL介绍
1.4 项目开发流程
2. 数据库设计-DDL
2.1 数据库操作
2.2 图形化工具
2.3 表操作
3. 数据库操作-DML
3.1 增加(insert)
3.2 修改(update)
3.3 删除(delete)
数据库开发-MySQL
前言
在我们讲解SpringBootWeb基础知识(请求响应案例)的时候,我们讲到在web开发中,为了应用程序职责单一,方便维护,我们一般将web应用程序分为三层,即:Controller、Service、Dao 。
之前我们的案例中,是这样子的请求流程:浏览器发起请求,先请求Controller;Controller接收到请求之后,调用Service进行业务逻辑处理;Service再调用Dao,Dao再解析user.xml中所存储的数据。
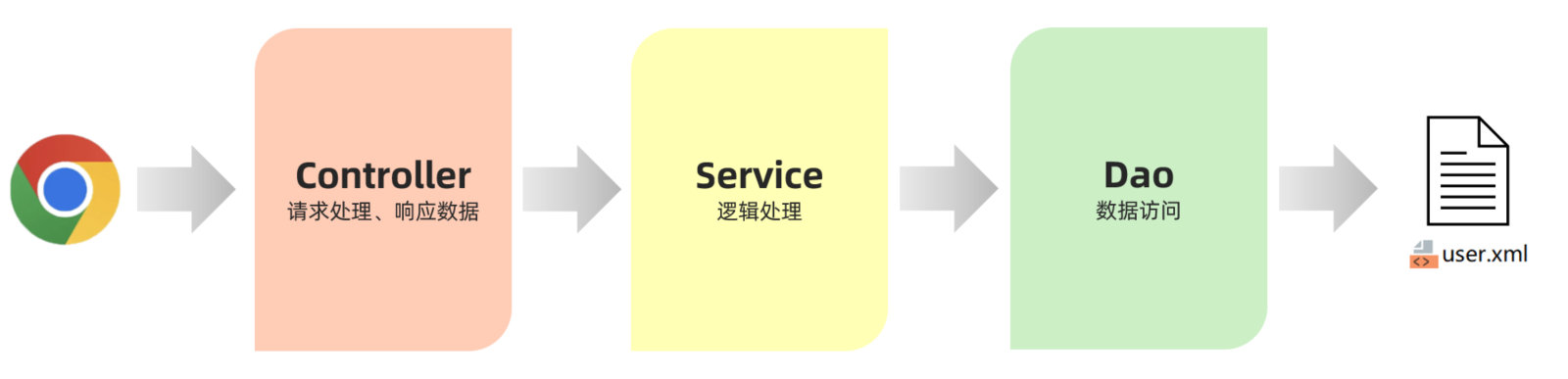
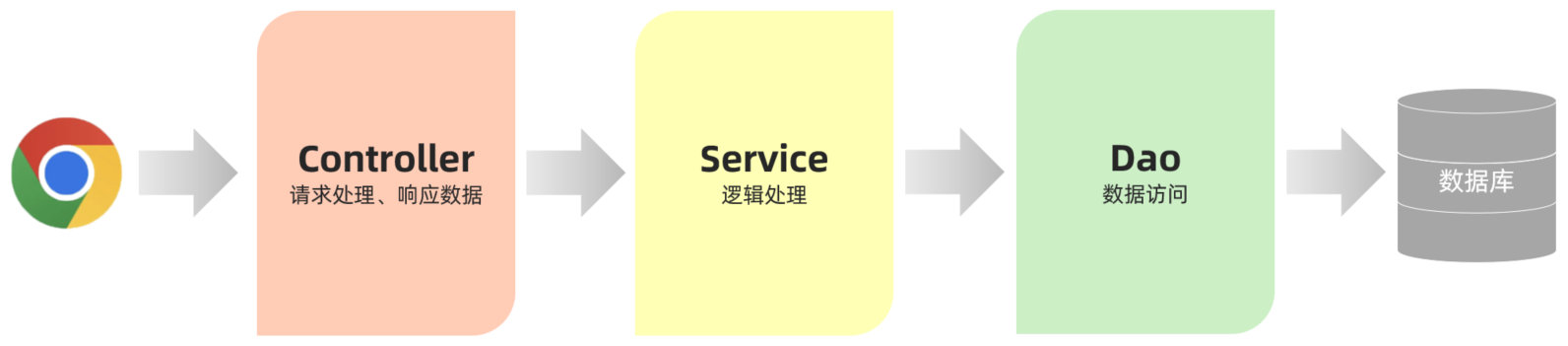
xml文件中可以存储数据,但是在企业项目开发中不会使用xml文件存储数据,因为不便管理维护,操作难度大。 在真实的企业开发中呢,都会采用数据库来存储和管理数据,那此时,web开发调用流程图如下所示:
首先来了解一下什么是数据库。
1). 什么是数据库
- 数据库:英文为 DataBase,简称DB,它是存储和管理数据的仓库。
像我们日常访问的电商网站京东,企业内部的管理系统OA、ERP、CRM这类的系统,以及大家每天都会刷的头条、抖音类的app,那这些大家所看到大数据,其实都是存储在数据库中的。最终这些数据,只是在浏览器或app中展示出来而已,最终数据的存储和管理都是数据库负责的。

数据是存储在数据库中的,那我们要如何来操作数据库以及数据库中所存放的数据呢?
那这里呢,其实涉及到一个软件:
- 数据库管理系统,英文全程DataBase Management System,简称DBMS,它是操作和管理数据库的大型软件。将来我们只需要操作这个软件,就可以通过这个软件来操纵和管理数据库了。
而我们操作这个软件会通过一门标准的语言-SQL。
- SQL:英文全程 Structured Query Language,简称SQL。它是操作关系型数据库的编程语言,定义了一套操作关系型数据库的统一标准。我们学习数据库开发,最为重要的就是学习SQL语句 。
了解了什么是数据库、数据库管理系统,以及SQL以后,我们再来看看,常见的数据库产品有哪些?我们课程中又要讲解哪款数据库呢。
2). 常见数据库产品
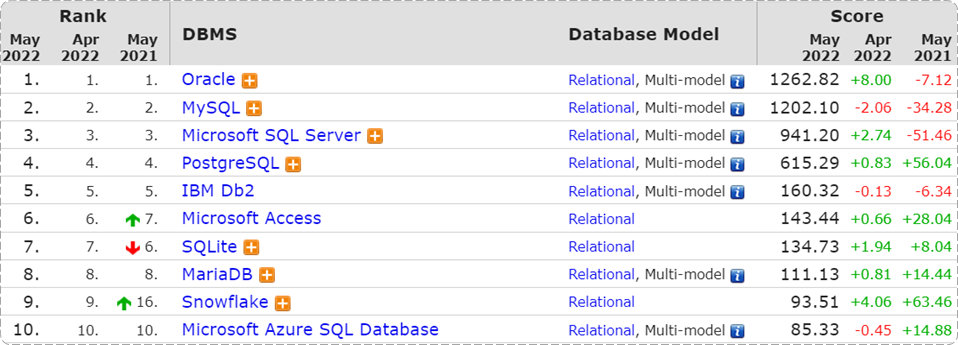
目前市面上,数据库产品有很多。这里呢,我截取了截止到目前各个数据库产品的排名情况。 我们会看到:
- Oracle:大型的收费数据库,Oracle公司产品,价格昂贵。
- MySQL:开源免费的中小型数据库,后来Sun公司收购了MySQL,而Oracle又收购了Sun公司。目前Oracle推出了收费版本的MySQL,也提供了免费的社区版本。
- SQL Server:Microsoft 公司推出的收费的中型数据库,C#、.net等语言常用。
- PostgreSQL:开源免费的中小型数据库。
- DB2:IBM公司的大型收费数据库产品。
- SQLLite:嵌入式的微型数据库。Android内置的数据库采用的就是该数据库。
- MariaDB:开源免费的中小型数据库。是MySQL数据库的另外一个分支、另外一个衍生产品,与MySQL数据库有很好的兼容性。
那这么多数据库,我们全部都需要学习吗,其实并不用,我们只需要学习其中的一个就可以了,我们此次课程中学习的数据库是现在互联网公司开发使用最为流行的MySQL数据库。
而不论我们使用的是上面的哪一个关系型数据库,最终在操作时,都是使用SQL语言来进行统一操作,因为我们前面讲到SQL语言,是操作关系型数据库的统一标准。所以即使我们现在学习的是MySQL,假如我们以后到了公司,使用的是别的关系型数据库,如:Oracle、DB2、SQLServer,也完全不用担心,因为操作的方式都是一致的。
3). 课程安排

MySQL数据库的课程呢,我们分为两个阶段,三个篇章进行讲解。 目前我们主要讲解前面两个篇章:数据库设计、数据库操作。 那对于数据库优化方便的知识呢,我们将在项目阶段的最后(面试专题课中)进行讲解。
1. MySQL概述

官网:MySQL :: Developer Zone
MySQL :: Developer Zonehttps://dev.mysql.com/
1.1 安装
1.1.1 版本
MySQL官方提供了两种不同的版本:
- 商业版本(MySQL Enterprise Edition)
该版本是收费的,我们可以使用30天。 官方会提供对应的技术支持。
- 社区版本(MySQL Community Server)
该版本是免费的,但是MySQL不会提供任何的技术支持。
本课程,采用的是MySQL的社区版本(8.0.28)
1.1.2 安装
官网下载地址:MySQL :: Download MySQL Community Server (Archived Versions)

这个安装包呢,大家可以不用下载,因为在提供的资料中已经下载完成了。

安装MySQL具体的步骤,我们只需要根据资料中的 《MySQL安装文档》 ,进行软件的安装即可。
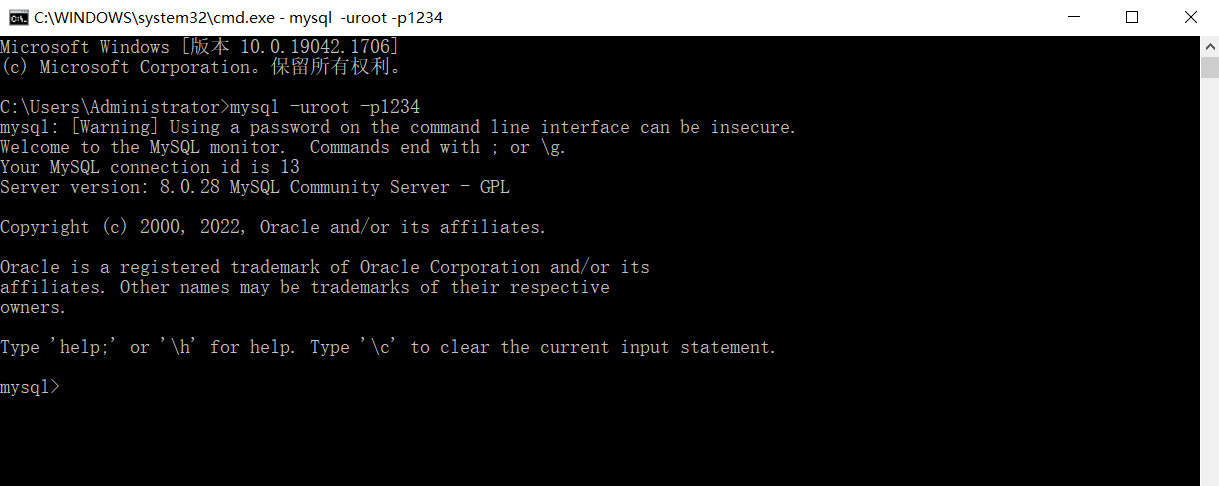
1.1.3 连接
MySQL服务器启动完毕后,然后再使用如下指令,来连接MySQL服务器:
mysql -u用户名 -p密码 [-h数据库服务器的IP地址 -P端口号]-h 参数不加,默认连接的是本地 127.0.0.1 的MySQL服务器。
-P 参数不加,默认连接的端口号是 3306。
上述指令,可以有两种形式:
1). 密码在-p回车之后,在命令行中输入,然后回车
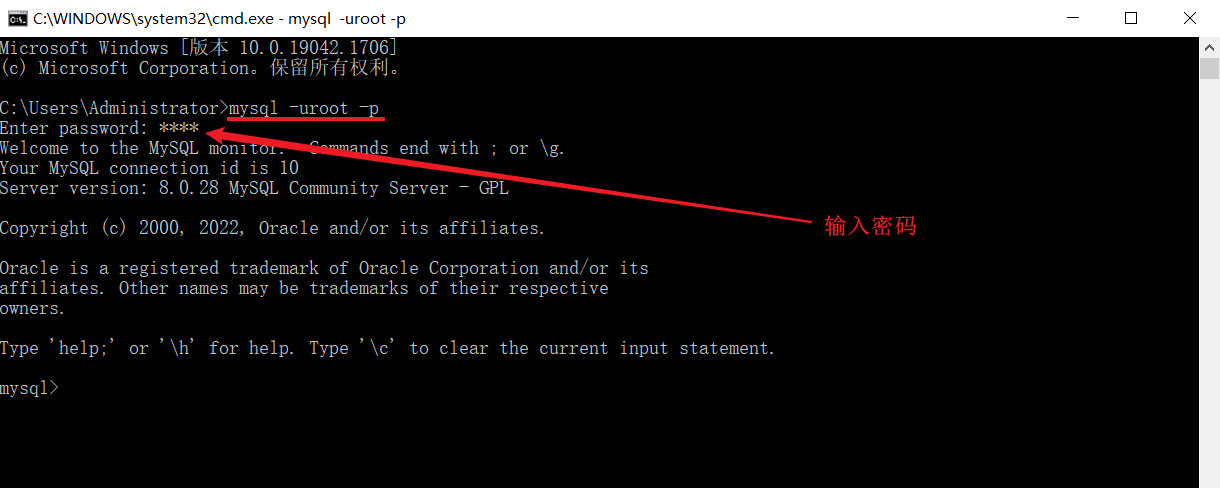
2). 密码直接在-p参数之后直接指定 (这种方式不安全,密码直接以明文形式出现在命令行)
1.1.4 企业使用方式(了解)
上述的MySQL服务器我们是安装在本地的,这个仅仅是在我们学习阶段,在真实的企业开发中,MySQL数据库服务器是不会在我们本地安装的,是在公司的服务器上安装的,而服务器还需要放置在专门的IDC机房中的,IDC机房呢,就需要保证恒温、恒湿、恒压,而且还要保证网络、电源的可靠性(备用电源及网络)。
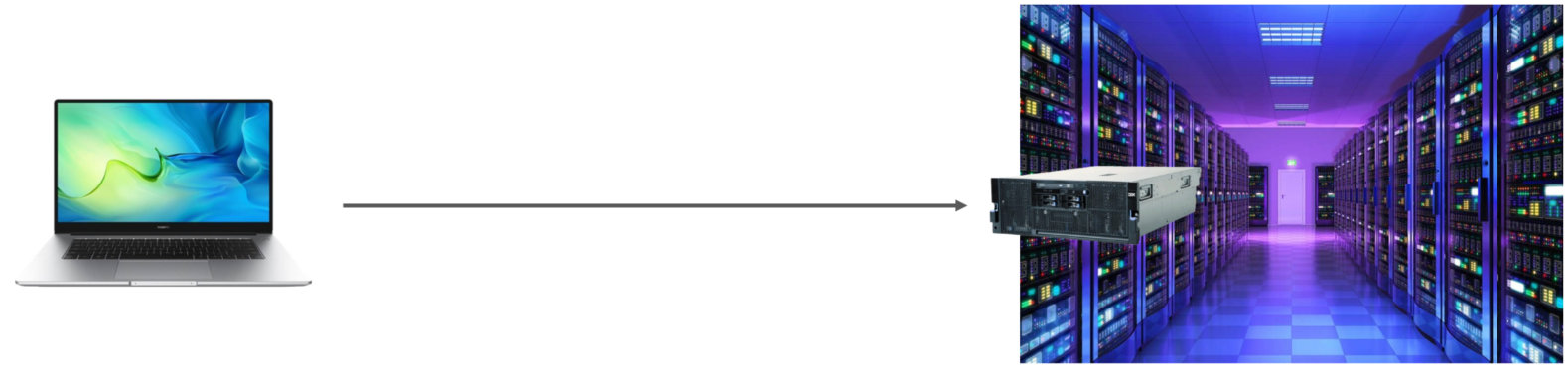
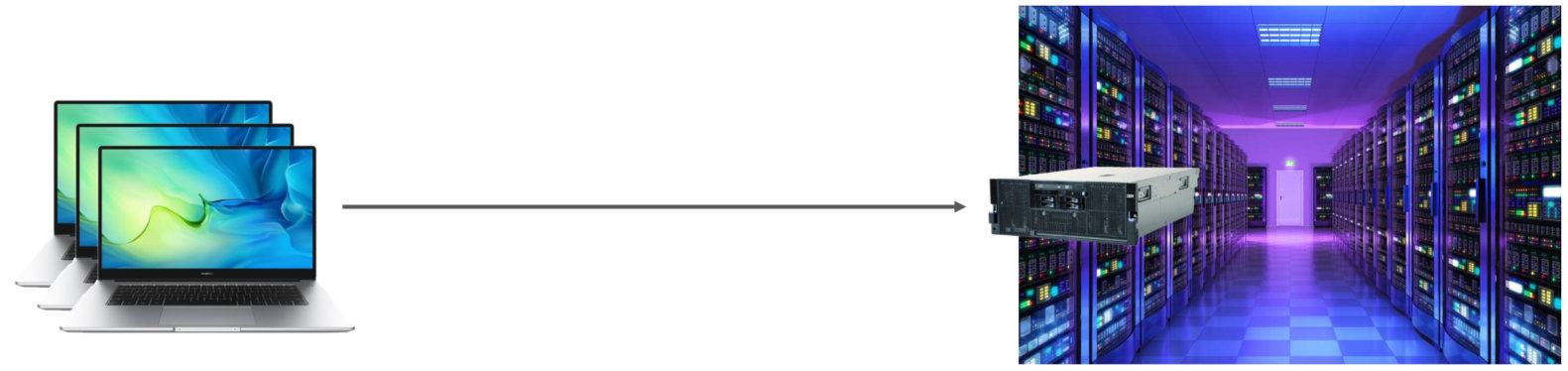
那我们要想使用服务器上的这台MySQL服务器,就需要在我们的电脑上去远程连接这台MySQL。 而服务器上安装的MySQL数据库呢,并不是你一个人在访问,我们项目组的其他开发人员也是需要访问这台MySQL的。
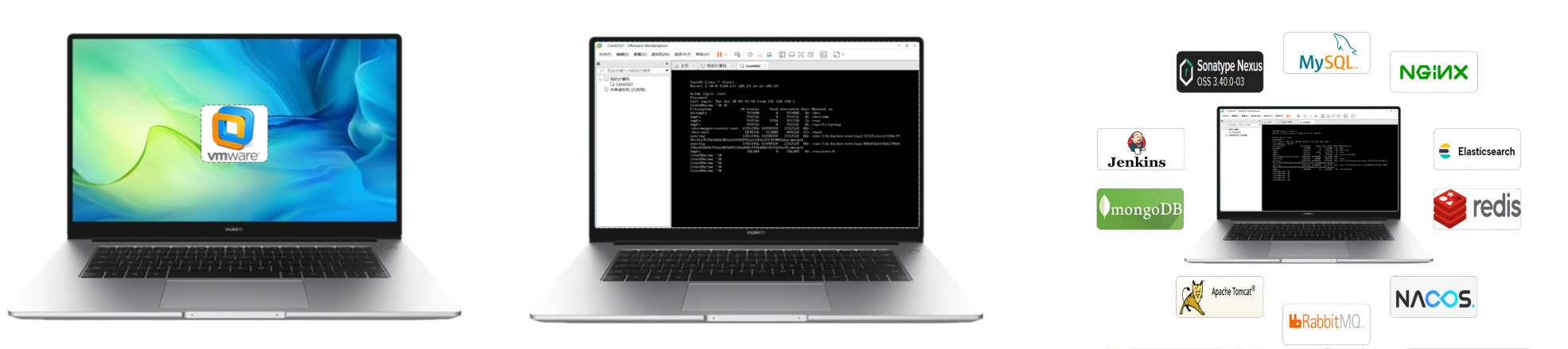
我们在学习阶段,如果想提前体验一下企业中数据库的使用方式,可以借助于VMware虚拟机来实现。我们可以在我们的电脑上安装一个VMware,然后在Vmware虚拟机上在安装一个服务器操作系统Linux,然后再在Linux服务器上安装各种企业级软件。
接下来,就来演示一下,通过MySQL的客户端命令行,如何来连接服务器上部署的MySQL :
mysql -u用户名 -p密码 [-h数据库服务器的IP地址 -P端口号]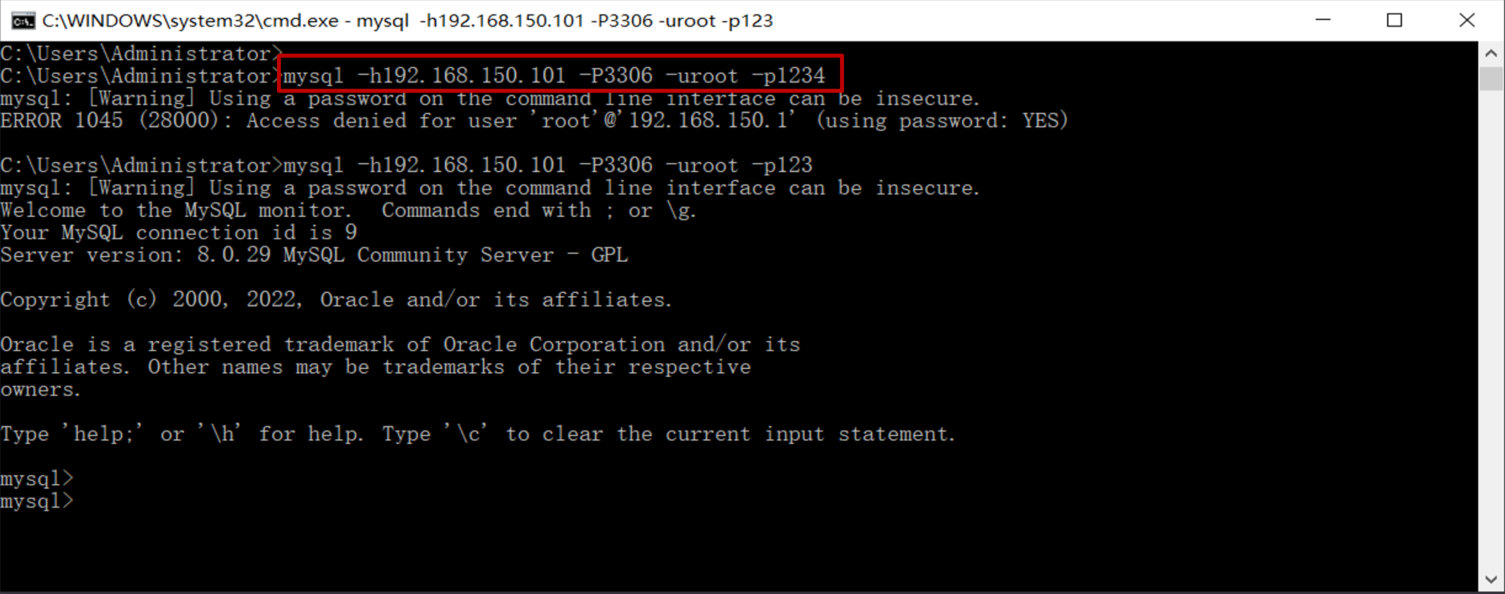
1.2 数据模型
1). 关系型数据库(RDBMS)
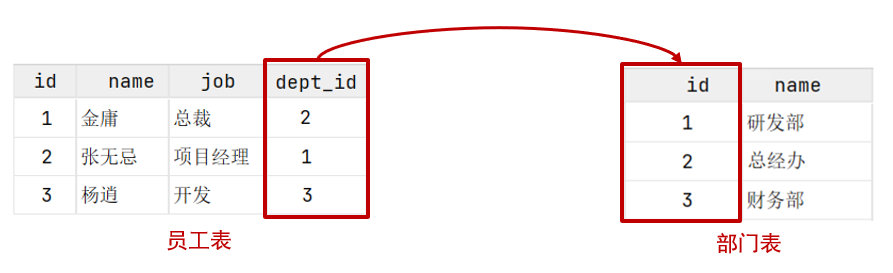
概念:建立在关系模型基础上,由多张相互连接的二维表组成的数据库。
而所谓二维表,指的是由行和列组成的表,如下图(就类似于Excel表格数据,有表头、有列、有行,还可以通过一列关联另外一个表格中的某一列数据)。我们之前提到的MySQL、Oracle、DB2、SQLServer这些都是属于关系型数据库,里面都是基于二维表存储数据的。简单说,基于二维表存储数据的数据库就成为关系型数据库,不是基于二维表存储数据的数据库,就是非关系型数据库。
特点:
A. 使用表存储数据,格式统一,便于维护。
B. 使用SQL语言操作,标准统一,使用方便,可用于复杂查询。
2). 数据模型
MySQL是关系型数据库,是基于二维表进行数据存储的,具体的结构图下:
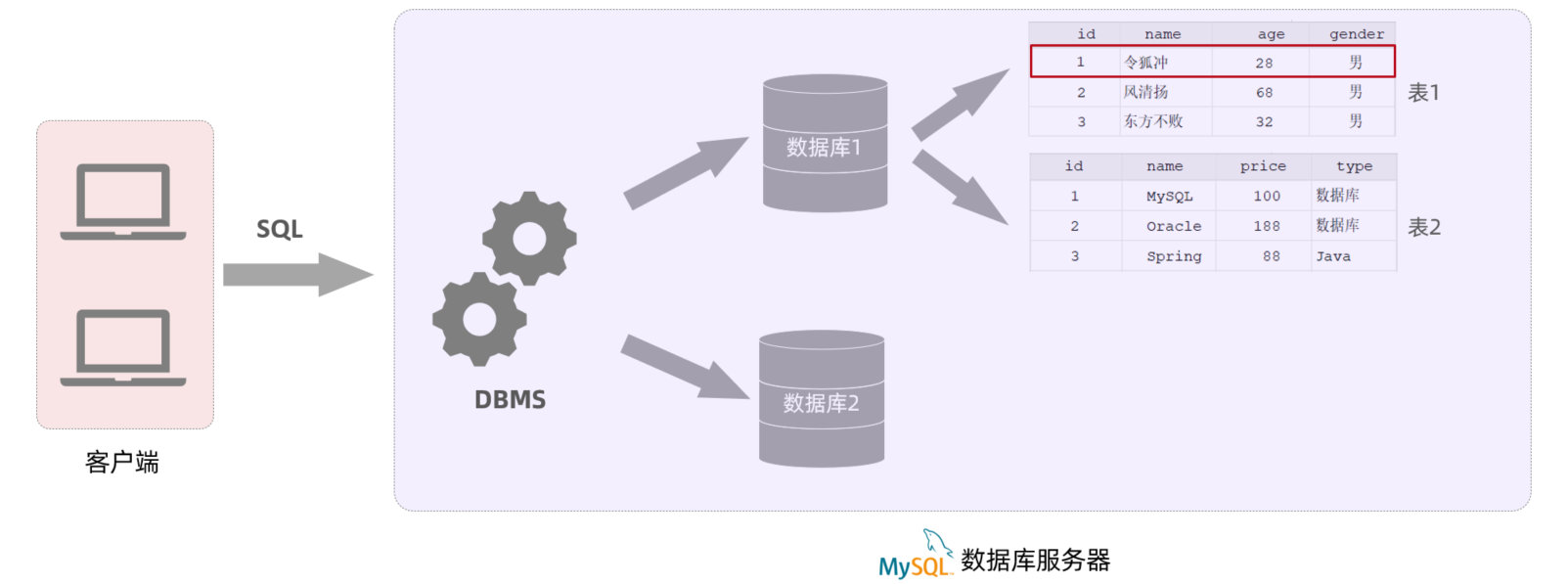
- 我们可以通过MySQL客户端连接数据库管理系统DBMS,然后通过DBMS操作数据库。
- 可以使用SQL语句,通过数据库管理系统操作数据库,以及操作数据库中的表结构及数据。
- 一个数据库服务器中可以创建多个数据库,一个数据库中也可以包含多张表,而一张表中又可以包含多行记录。
1.3 SQL介绍
SQL:全称 Structured Query Language,结构化查询语言。操作关系型数据库的编程语言,定义了一套操作关系型数据库统一标准 。
在学习具体的SQL语句之前,先来了解一下SQL语言的语法。
1.3.1 SQL通用语法
1). SQL语句可以单行或多行书写,以分号结尾。
2). SQL语句可以使用空格/缩进来增强语句的可读性。
3). MySQL数据库的SQL语句关键字不区分大小写。
4). 注释:
- 单行注释:-- 注释内容 或 # 注释内容- 多行注释:/* 注释内容 */1.3.2 分类
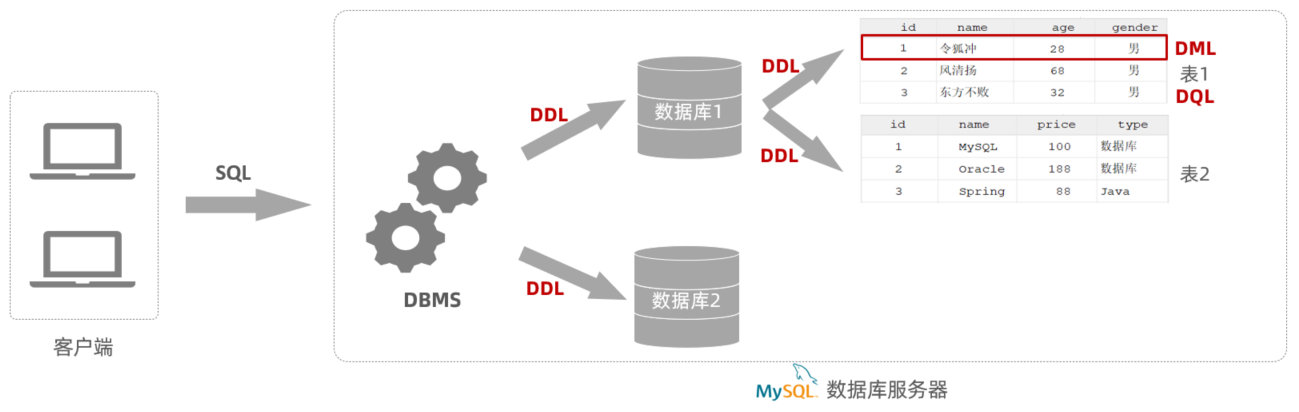
SQL语句,根据其功能,主要分为四类:DDL、DML、DQL、DCL 。
| 分类 | 全称 | 说明 |
| DDL | Data Definition Language | 数据定义语言,用来定义数据库对象(数据库,表,字段) |
| DML | Data Manipulation Language | 数据操作语言,用来对数据库表中的数据进行增删改 |
| DQL | Data Query Language | 数据查询语言,用来查询数据库中表的记录 |
| DCL | Data Control Language | 数据控制语言,用来创建数据库用户、控制数据库的访问权限 |
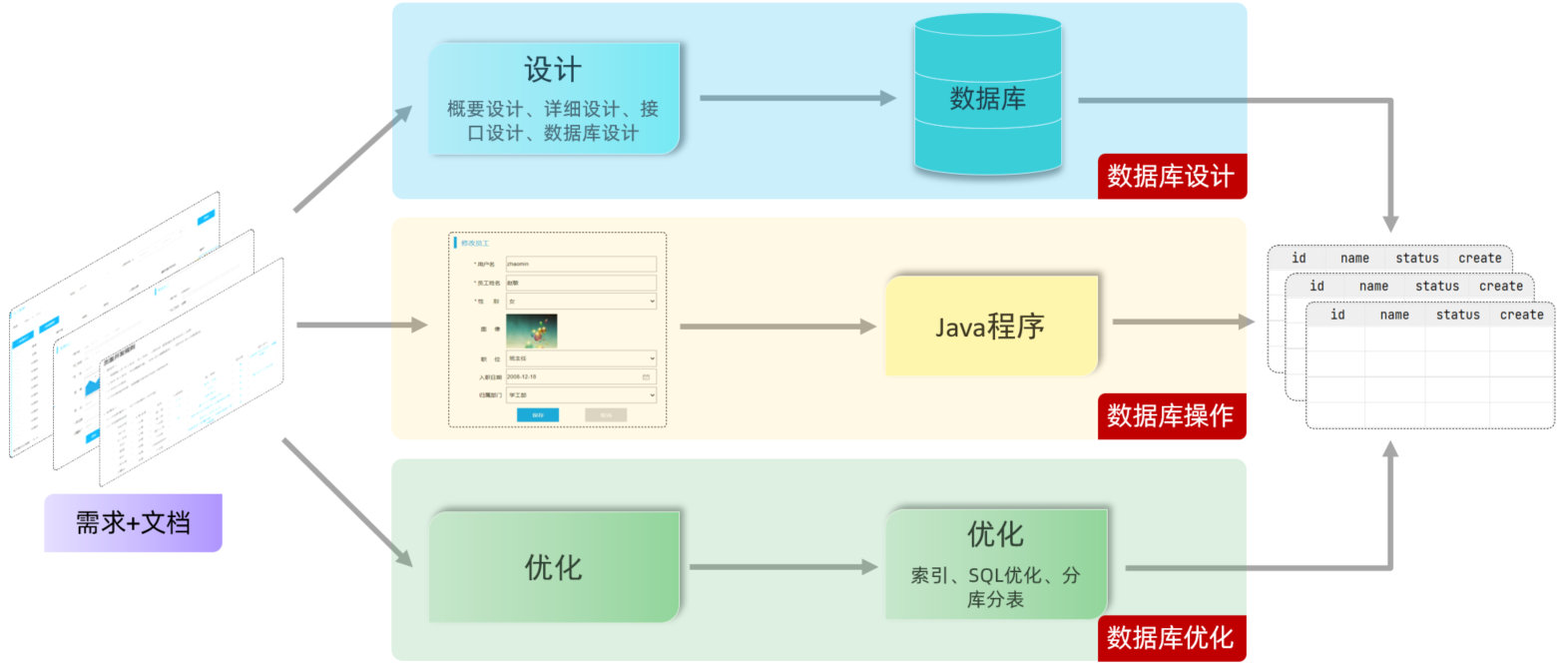
1.4 项目开发流程
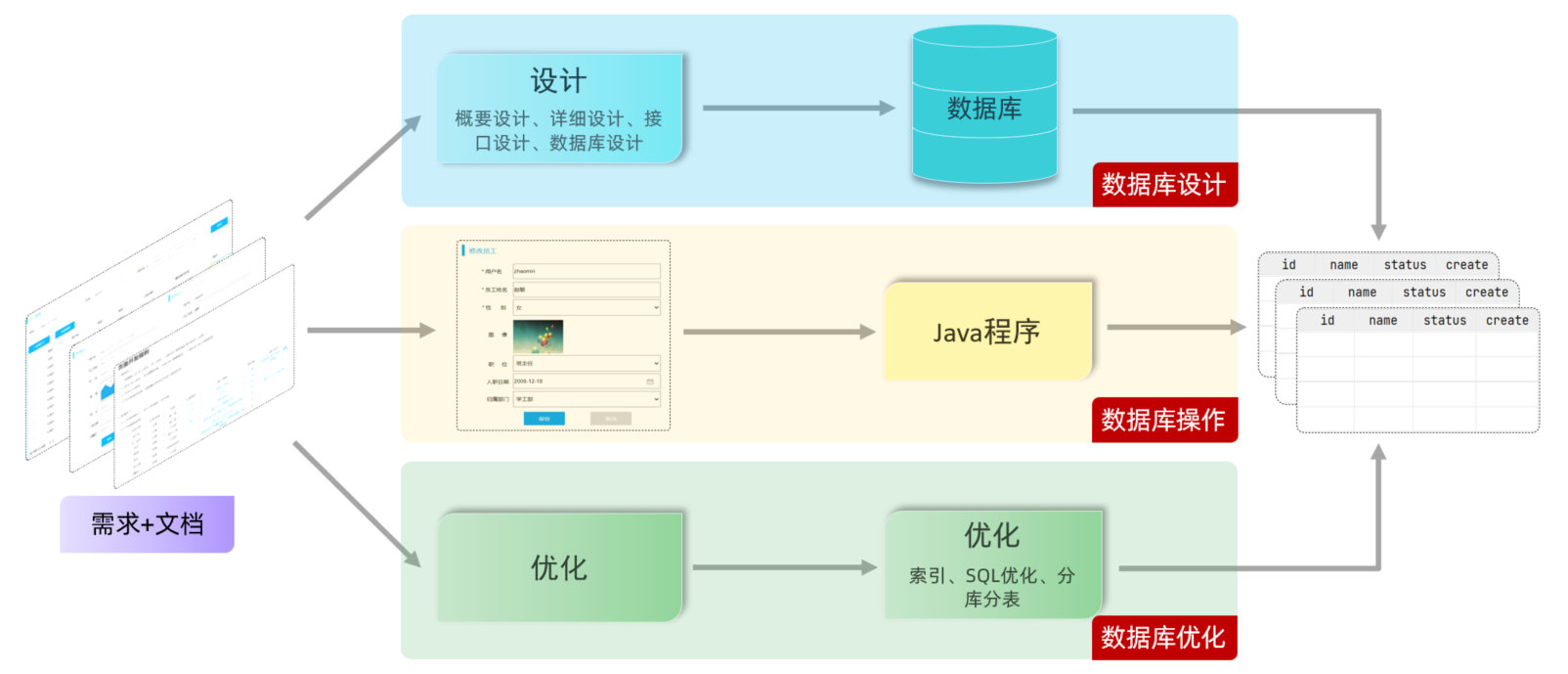
1). 数据库设计阶段
在项目开发时,首先开发人员需要根据产品经理出具的页面原型 和 需求文档进行需求的分析,然后进行项目的设计,包括:概要设计、详细设计、接口设计、数据库设计等。那这里呢,有很重要的一环,就是数据库设计,要设计数据库以及存储数据的表接口。 这是第一阶段,数据库设计阶段。
2). 数据库操作阶段
我们根据页面原型及需求分档,分析需求,实现业务功能,最终要通过java程序操作数据库中的数据,完成数据的增删改查操作。而要操作数据库,我们就得通过SQL语句去操作,所以在这一阶段,最重要的就是数据库。
3). 数据库优化阶段
我们的基本业务功能实现完毕后,还得考虑项目的优化,而项目优化,很重要的一环就是数据库的优化。当然数据库优化的手段有很多,包括:索引、SQL优化、分库分表等等。
2. 数据库设计-DDL
DDL英文全程是 :Data Definition Language,数据定义语言,用来定义数据库对象(数据库,表) 。
2.1 数据库操作
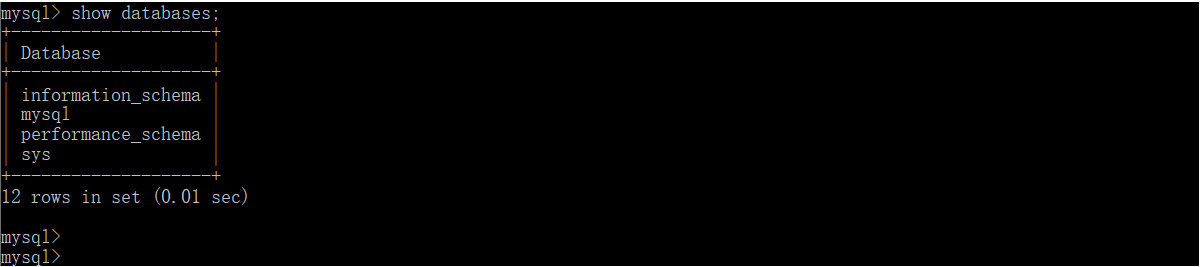
1). 查询所有数据库
show databases ;命令行中执行效果如下:
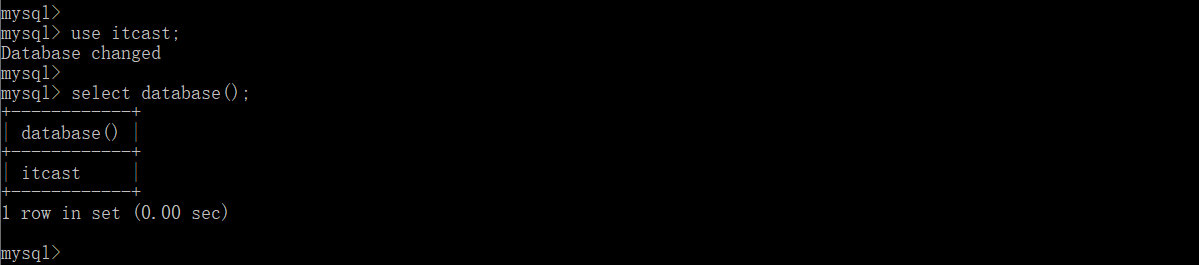
2). 查询当前数据库
select database() ;我们要操作某一个数据库,必须要切换到对应的数据库中。 通过上述指令,就可以查询到当前所处的数据库 。
3). 创建数据库
create database [ if not exists ] 数据库名;案例: 创建一个itcast数据库。
create database itcast;命令行执行效果如下:

在同一个数据库服务器中,不能创建两个名称相同的数据库,否则将会报错。

可以通过if not exists 参数来解决这个问题,数据库不存在, 则创建该数据库,如果存在,则不创建。
create database if not extists itcast;命令行执行效果如下:

4). 切换数据库
use 数据库名 ;我们要操作某一个数据库下的表时,就需要通过该指令,切换到对应的数据库下,否则是不能操作的。比如,切换到itcast数据,执行如下SQL:
use itcast;命令执行效果如下:
5). 删除数据库
drop database [ if exists ] 数据库名 ;如果删除一个不存在的数据库,将会报错。此时,可以加上参数 if exists ,如果数据库存在,再执行删除,否则不执行删除。
命令执行效果如下:

- 上述语法中的database,也可以替换成 schema。
-
- 如:create schema db01;
- 如:show schemas;
2.2 图形化工具
2.2.1 介绍
上述,我们已经讲解了通过DDL语句,如何操作数据库,而通过DDL语句执行在命令行进行操作,主要存在以下两点问题:
1). 会影响开发效率 ;
2). 使用起来,并不直观,并不方便 ;
所以呢,我们在日常的开发中,会借助于MySQL的图形化界面,来简化开发,提高开发效率。而目前mysql主流的图形化界面工具,有以下几种:
而本次课程中,选择最后一种DataGrip,这种图形化界面工具,功能更加强大,界面提示更加友好,是我们使用MySQL的不二之选。接下来,我们来介绍一下DataGrip该如何安装、使用。
2.2.2 安装
1). 关于DataGrip的安装及配置,请参考资料中提供的 《DataGrip使用手册》。
2). 也可以直接使用IDEA来连接数据库。(简单方便-推荐)
2.2.3 使用
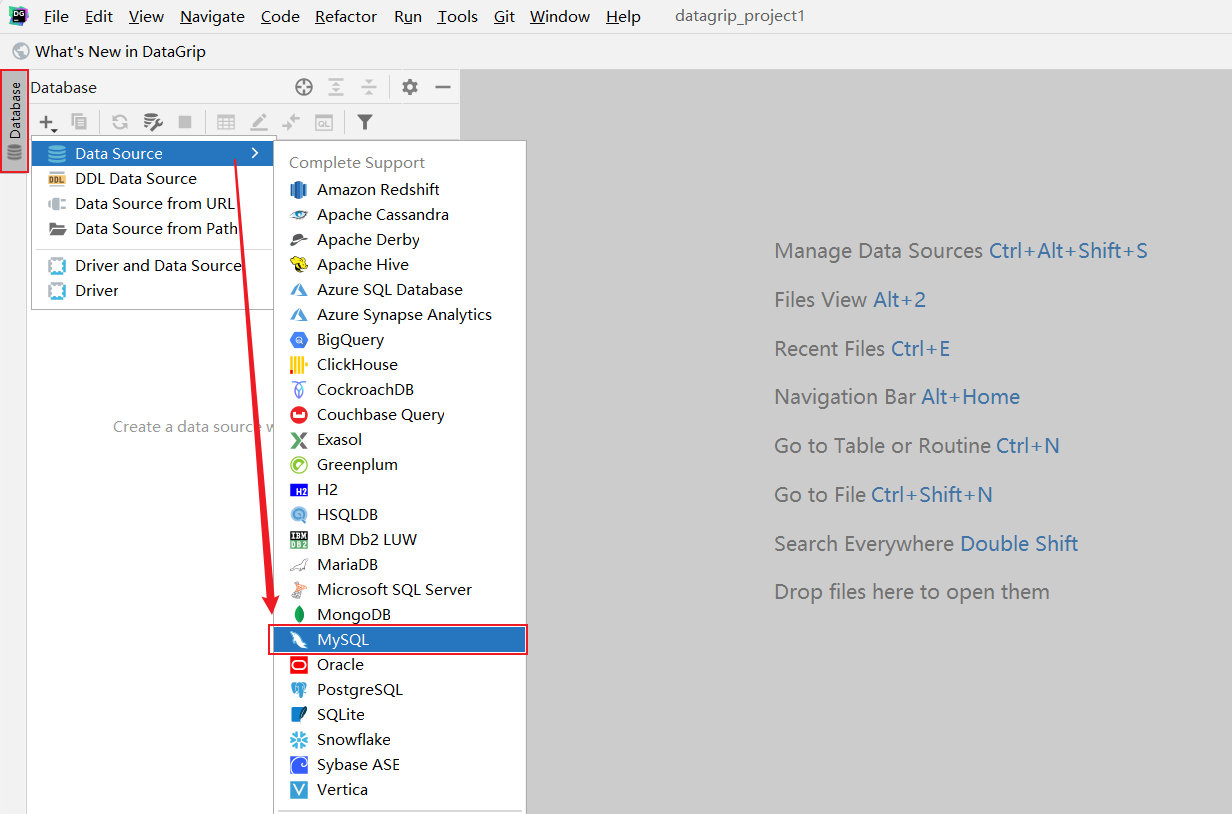
2.2.3.1 连接数据库
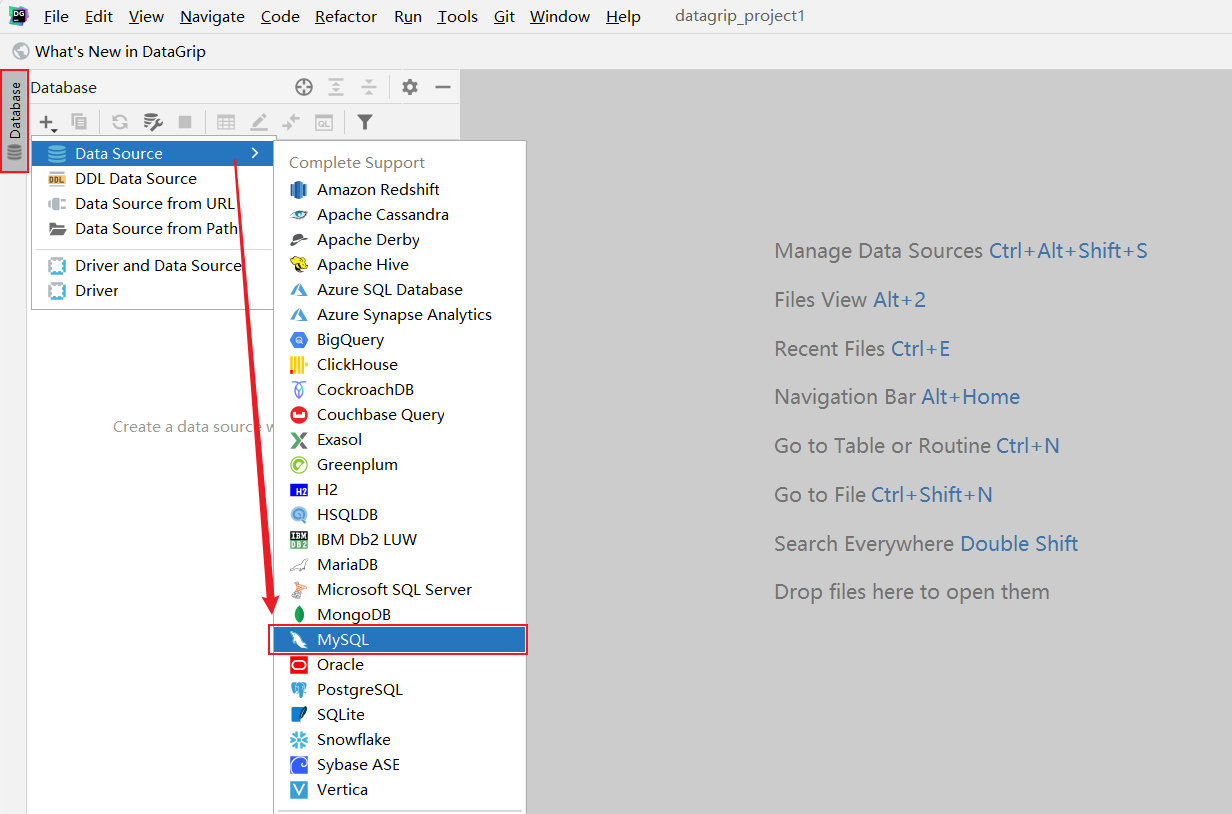
输入comment备注信息 ; 输入连接的Host主机地址,默认localhost;输入用户名,默认root ;输入密码 , 安装mysql的时候, 设置的mysql的访问密码 。
然后点击 Download 下载数据库连接驱动。
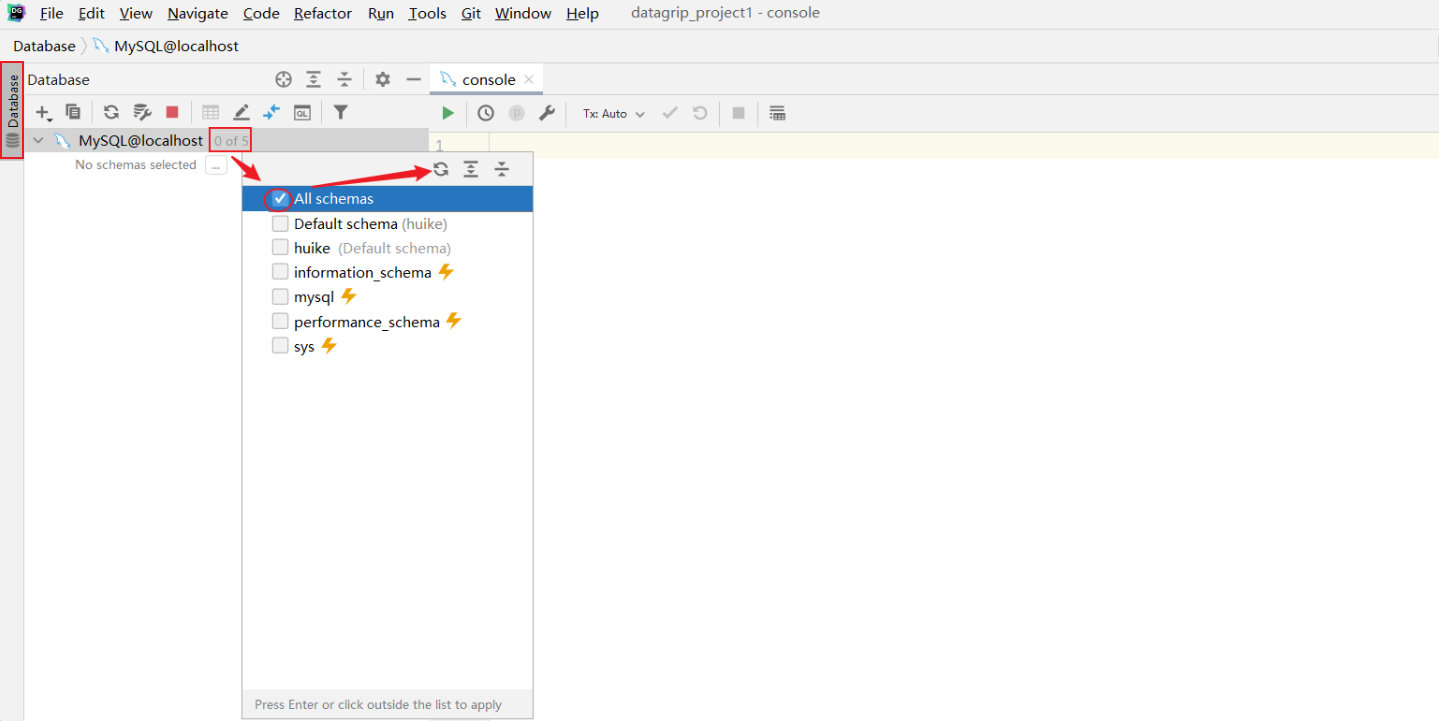
驱动下载完成之后, 点击 Test Connection。 如果显示 Successed 就说明连接成功了。 然后点击 OK 按钮,连接数据库。
默认情况下 , 连接上了MySQL数据库之后, 数据库并没有全部展示出来。 需要选择要展示哪些数据库。
2.2.3.2 创建数据库
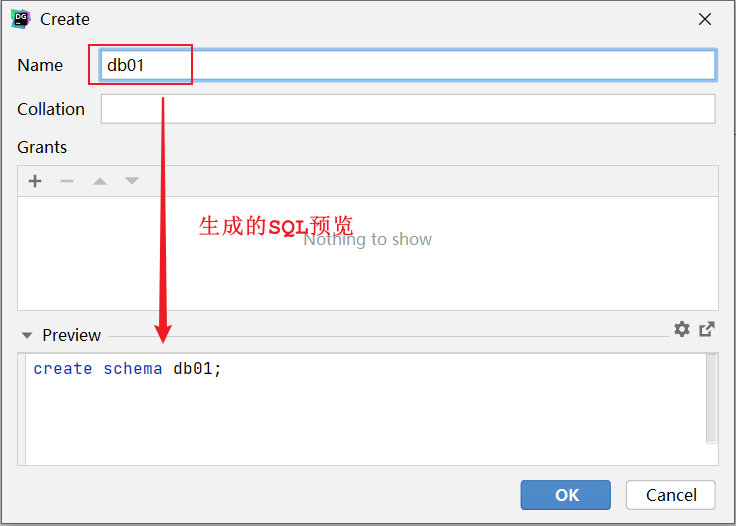
有了图形化界面工具后,我们就可以方便的使用图形化工具,来创建数据库,创建表、修改表等DDL操作。其实,底层也是通过DDL语句操作的数据库,只不过这些SQL语句时图形化界面工具帮我们自动完成的。
2.3 表操作
2.3.1 创建
2.3.1.1 语法
create table 表名(字段1 字段1类型 [约束] [comment 字段1注释 ],字段2 字段2类型 [约束] [comment 字段2注释 ],字段3 字段3类型 [约束] [comment 字段3注释 ],......字段n 字段n类型 [约束] [comment 字段n注释 ]
) [ comment 表注释 ] ;注意: [ ... ] 为可选参数, 最后一个字段后面没有逗号
比如,我们创建一张表 tb_user ,对应的结构如下:
那么建表语句为:
create table tb_user (id int comment 'ID',username varchar(20) comment '用户名',name varchar(10) comment '姓名',age int comment '年龄',gender char(1) comment '性别'
) comment '用户表';2.3.1.2 约束
概念:约束是作用于表中字段上的规则,用于限制存储在表中的数据。
目的:保证数据库中数据的正确、有效性和完整性。
分类:
| 约束 | 描述 | 关键字 |
| 非空约束 | 限制该字段的数据不能为null | NOT NULL |
| 唯一约束 | 保证该字段的所有数据都是唯一、不重复的 | UNIQUE |
| 主键约束 | 主键是一行数据的唯一标识,要求非空且唯一 | PRIMARY KEY |
| 默认约束 | 保存数据时,如果未指定该字段的值,则采用默认值 | DEFAULT |
| 外键约束 | 用来让两张表的数据之间建立连接,保证数据的一致性和完整性 | FOREIGN KEY |
注意:约束是作用于表中字段上的,可以在创建表/修改表的时候添加约束。
比如,我们创建一张表 tb_user2 ,对应的结构如下:

在上述的表结构中:
A. id 是一行数据的唯一标识。
B. username 用户名字段是非空且唯一的。
C. name 姓名字段是不允许存储空值的。
D. gender 性别字段是有默认值的,默认为男。
对应的建表语句为:
create table tb_user2 (id int primary key auto_increment comment 'ID',username varchar(20) not null unique comment '用户名',name varchar(10) not null comment '姓名',age int comment '年龄',gender char(1) default '男' comment '性别'
) comment '用户表';主键自增 auto_increment:
具有auto_increment属性的数据列应该是一个正数序列(从1开始自增),auto_increment数据列必须有唯一索引,以避免序号重复;必须具备NOT NULL属性。
表结构创建完毕后,我们可以 双击左侧菜单的表结构, 然后点击 + 号,就可以手动的通过图形化界面的形式来往表中添加数据,来测试一下约束是否生效。
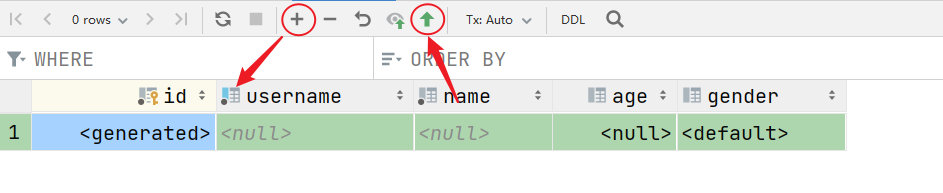
编辑完数据之后,需要点击 提交按钮,确认提交数据。
2.3.1.3 数据类型
在上述的建表语句中,我们在指定字段的数据类型时,用到了int 、varchar、char,那么在MySQL中除了以上的数据类型,还有哪些常见的数据类型呢? 接下来,我们就来详细介绍一下MySQL的数据类型。
MySQL中的数据类型有很多,主要分为三类:数值类型、字符串类型、日期时间类型。
1). 数值类型
| 类型 | 大小 | 有符号(SIGNED)范围 | 无符号(UNSIGNED)范围 | 描述 |
| TINYINT | 1byte | (-128,127) | (0,255) | 小整数值 |
| SMALLINT | 2bytes | (-32768,32767) | (0,65535) | 大整数值 |
| MEDIUMINT | 3bytes | (-8388608,8388607) | (0,16777215) | 大整数值 |
| INT/INTEGER | 4bytes | (-2147483648,2147483647) | (0,4294967295) | 大整数值 |
| BIGINT | 8bytes | (-263,263-1) | (0,2^64-1) | 极大整数值 |
| FLOAT | 4bytes | (-3.402823466 E+38,3.402823466351 E+38) | 0 和 (1.175494351 E-38,3.402823466 E+38) | 单精度浮点数值 |
| DOUBLE | 8bytes | (-1.7976931348623157 E+308,1.7976931348623157 E+308) | 0 和 (2.2250738585072014 E-308,1.7976931348623157 E+308) | 双精度浮点数值 |
| DECIMAL | 依赖于M(精度)和D(标度)的值 | 依赖于M(精度)和D(标度)的值 | 小数值(精确定点数) |
如: 1). 年龄字段 -- 不会出现负数, 而且人的年龄不会太大age tinyint unsigned2). 分数 -- 总分100分, 最多出现一位小数score double(4,1)2). 字符串类型
| 类型 | 大小 | 描述 |
| CHAR | 0-255 bytes | 定长字符串(需要指定长度) |
| VARCHAR | 0-65535 bytes | 变长字符串(需要指定长度) |
| TINYBLOB | 0-255 bytes | 不超过255个字符的二进制数据 |
| TINYTEXT | 0-255 bytes | 短文本字符串 |
| BLOB | 0-65 535 bytes | 二进制形式的长文本数据 |
| TEXT | 0-65 535 bytes | 长文本数据 |
| MEDIUMBLOB | 0-16 777 215 bytes | 二进制形式的中等长度文本数据 |
| MEDIUMTEXT | 0-16 777 215 bytes | 中等长度文本数据 |
| LONGBLOB | 0-4 294 967 295 bytes | 二进制形式的极大文本数据 |
| LONGTEXT | 0-4 294 967 295 bytes | 极大文本数据 |
char 与 varchar 都可以描述字符串,char是定长字符串,指定长度多长,就占用多少个字符,和字段值的长度无关 。而varchar是变长字符串,指定的长度为最大占用长度 。相对来说,char的性能会更高些。
如: 1). 用户名 username ------> 长度不定, 最长不会超过50username varchar(50)3). 手机号 phone --------> 固定长度为11phone char(11)
3). 日期时间类型
| 类型 | 大小 | 范围 | 格式 | 描述 |
| DATE | 3 | 1000-01-01 至 9999-12-31 | YYYY-MM-DD | 日期值 |
| TIME | 3 | -838:59:59 至 838:59:59 | HH:MM:SS | 时间值或持续时间 |
| YEAR | 1 | 1901 至 2155 | YYYY | 年份值 |
| DATETIME | 8 | 1000-01-01 00:00:00 至 9999-12-31 23:59:59 | YYYY-MM-DD HH:MM:SS | 混合日期和时间值 |
| TIMESTAMP | 4 | 1970-01-01 00:00:01 至 2038-01-19 03:14:07 | YYYY-MM-DD HH:MM:SS | 混合日期和时间值,时间戳 |
如: 1). 生日字段 birthdaybirthday date2). 创建时间 createtimecreatetime datetime
2.3.1.4 案例
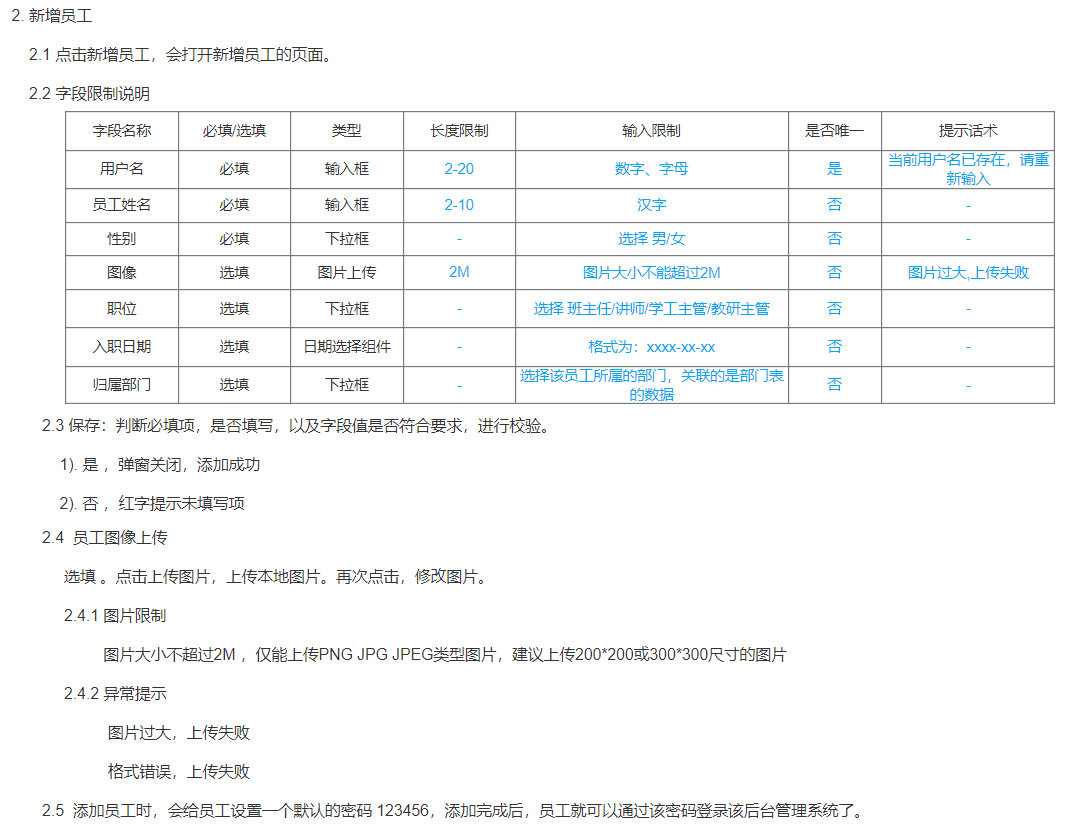
需求:根据产品原型/需求创建表(设计合理的数据类型、长度)
注意:暂时不考虑所属部门字段
产品原型及需求如下:


步骤:
A. 阅读产品原型及需求文档,看看里面涉及到哪些字段。
B. 查看需求文档说明,确认各个字段的类型以及字段存储数据的长度限制。
C. 在页面原型中描述的基础字段的基础上,再增加额外的基础字段。
SQL:
create table emp (id int unsigned primary key auto_increment comment 'ID',username varchar(20) not null unique comment '用户名',password varchar(32) default '123456' comment '密码',name varchar(10) not null comment '姓名',gender tinyint unsigned not null comment '性别, 说明: 1 男, 2 女',image varchar(300) comment '图像',job tinyint unsigned comment '职位, 说明: 1 班主任,2 讲师, 3 学工主管, 4 教研主管',entrydate date comment '入职时间',create_time datetime not null comment '创建时间',update_time datetime not null comment '修改时间'
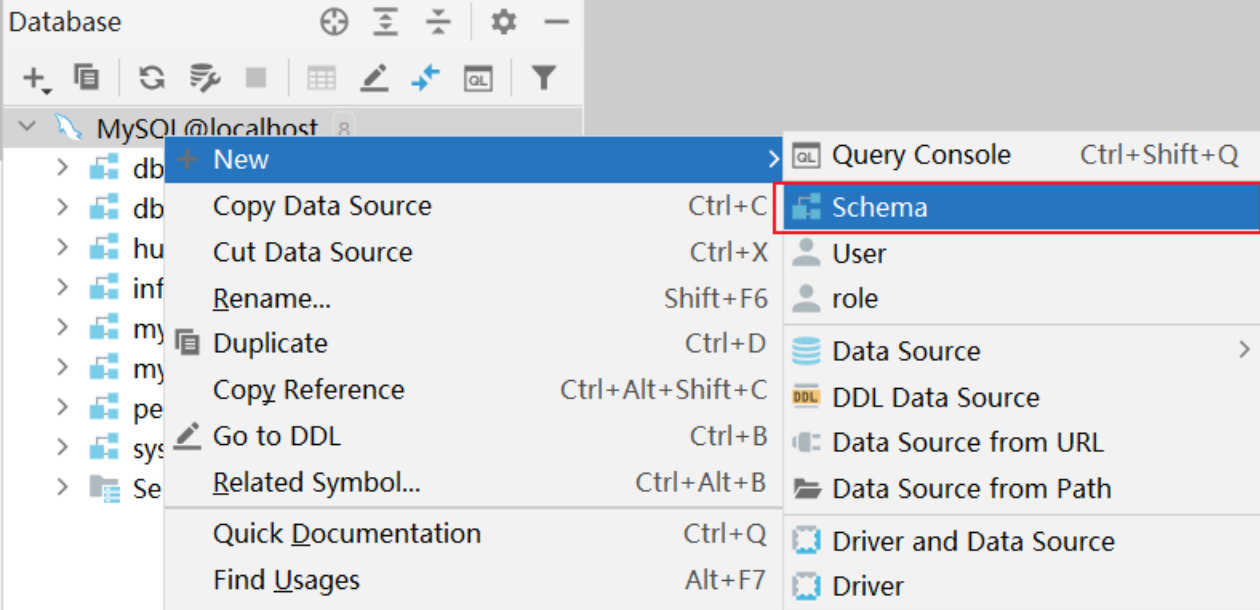
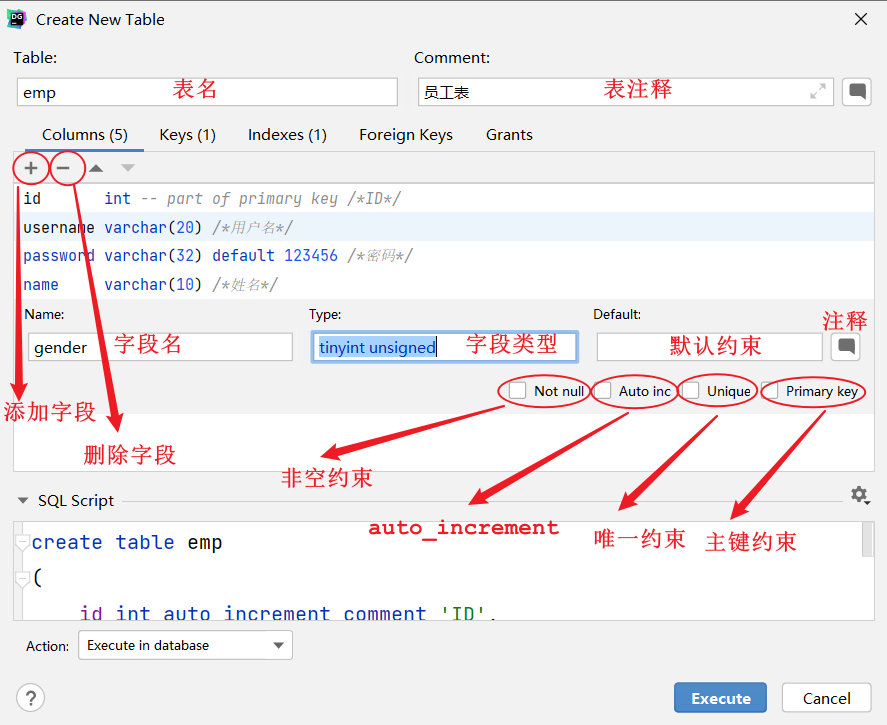
) comment '员工表';那其实,在实际的开发过程中,创建表结构,我们一般会借助于图形化界面来创建,这样更加直观,更加方便。具体的操作步骤为:
1). 在指定操作的数据库上,右键 New---> Table
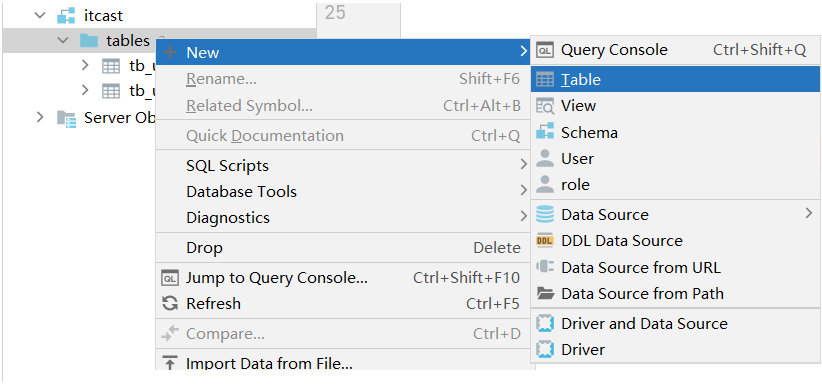
2). 编辑表结构的相关信息
2.3.1.5 创建表流程
通过这样一个案例,我们明白了,设计一张表,基本的流程如下:
A. 阅读页面原型及需求文档
B. 确定原型中的表结构所包含的字段,以及字段的类型、长度限制
C. 再增加一张表所需要的业务基础字段
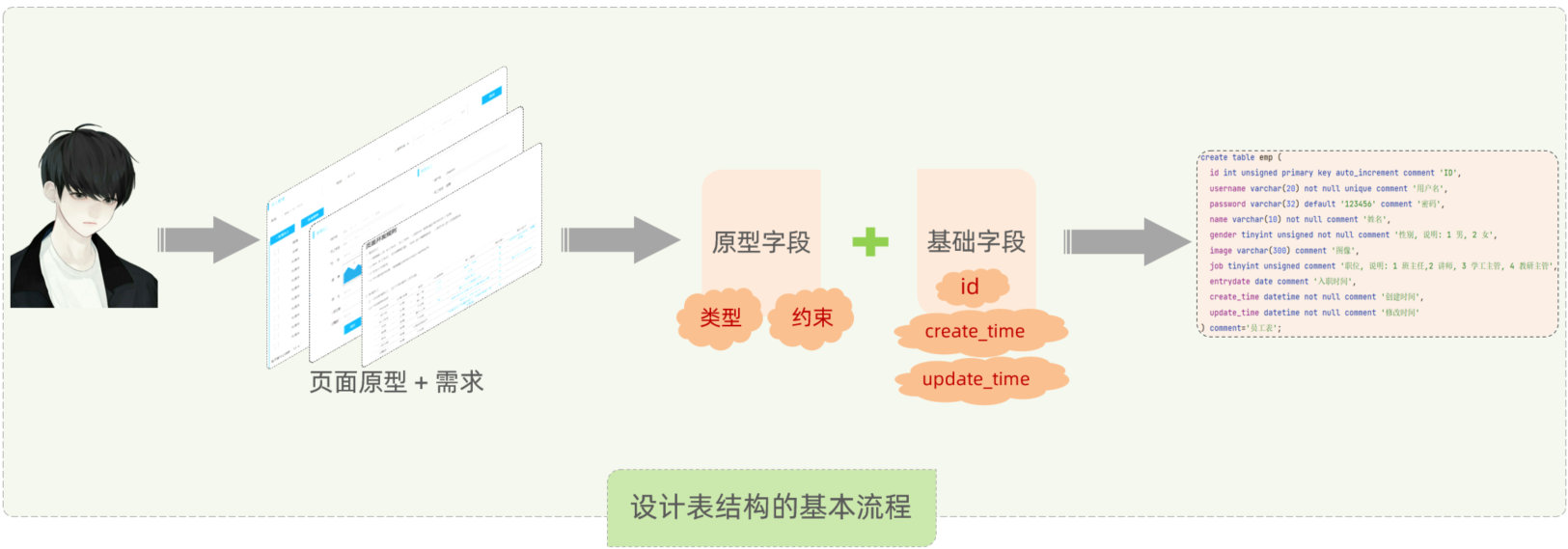
注意事项:
create_time:记录的是当前这条数据插入的时间。
update_time:记录当前这条数据最后更新的时间。
表结构创建好了,里面的name字段是varchar类型,最大长度为10,也就意味着如果超过10将会报错,如果我们想修改这个字段的类型 或 修改字段的长度该如何操作呢?接下来再来讲解DDL语句中,如何操作表字段。
2.3.2 查询
关于表结构的查询操作,工作中一般都是直接基于图形化界面操作。
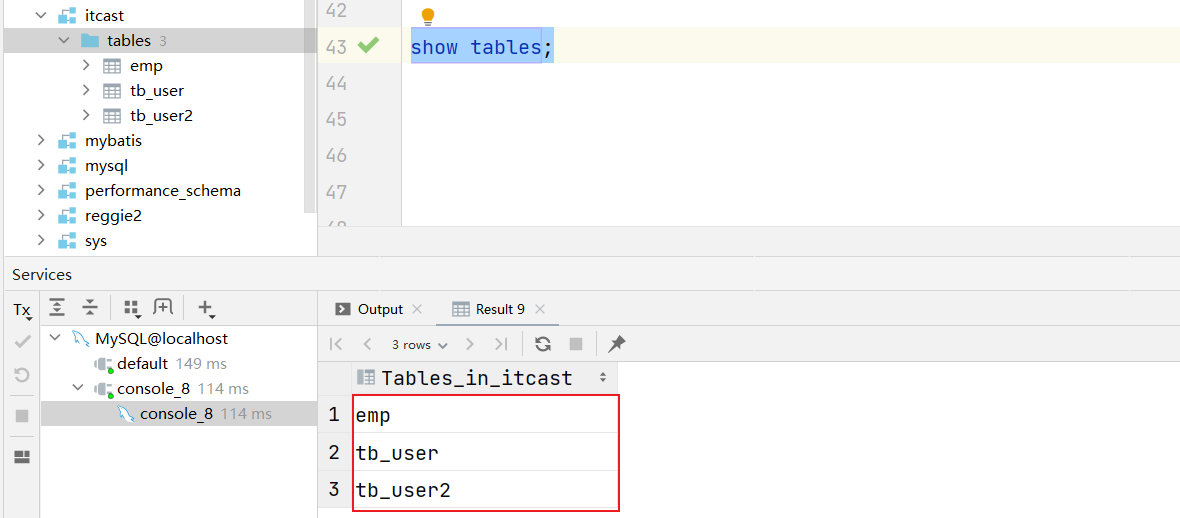
1). 查询当前数据库所有表
show tables;比如,我们可以切换到itcast这个系统数据库,并查看系统数据库中的所有表结构。
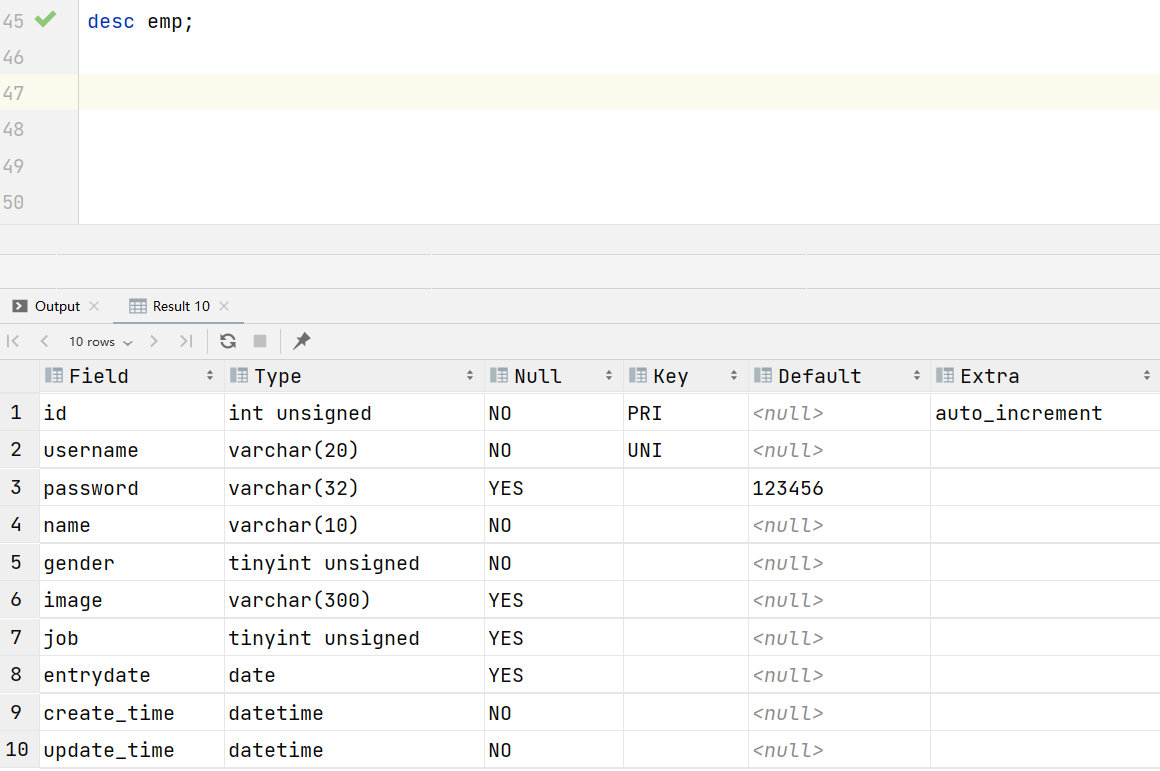
2). 查看指定表结构
desc 表名 ;通过这条指令,我们可以查看到指定表的字段,字段的类型、是否可以为NULL,是否存在默认值等信息。
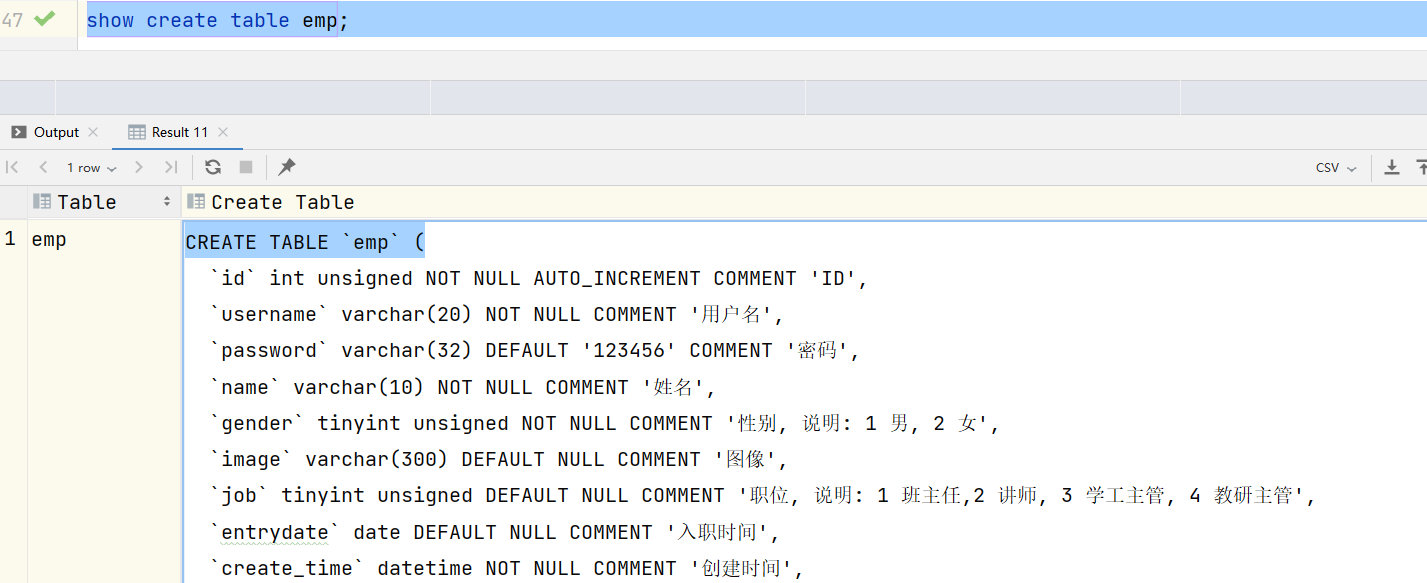
3). 查询指定表的建表语句
show create table 表名 ;通过这条指令,主要是用来查看建表语句的,而有部分参数我们在创建表的时候,并未指定也会查询到,因为这部分是数据库的默认值,如:存储引擎、字符集等。
4.2.3 修改
关于表结构的修改操作,工作中一般都是直接基于图形化界面操作。
1). 添加字段
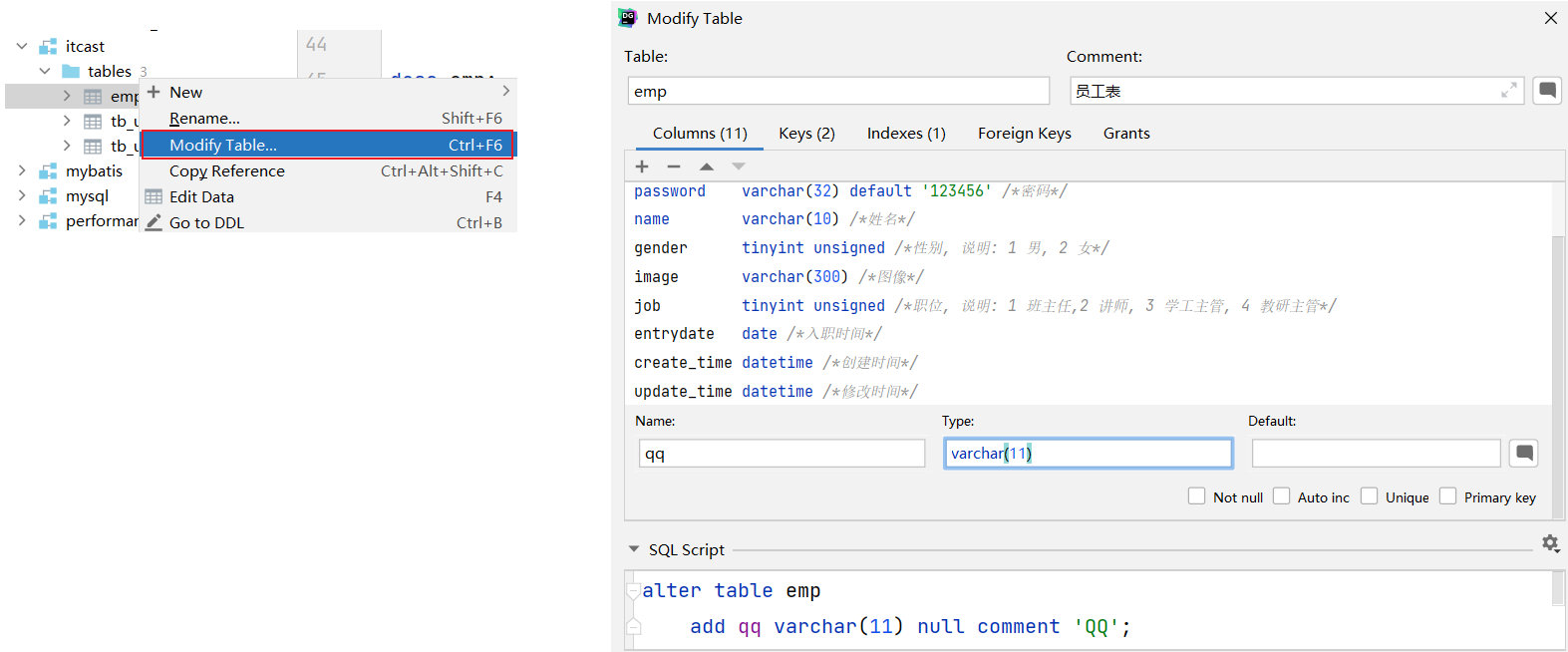
alter table 表名 add 字段名 类型 (长度) [ comment 注释 ] [ 约束 ];比如: 为employee表添加字段 qq,字段类型为 varchar(11)
alter table emp add qq varchar(11) comment 'QQ号码';图形化界面操作:
2). 修改数据类型
alter table 表名 modify 字段名 新数据类型 (长度);比如:修改qq字段的字段类型,将其长度由11修改为13
alter table 表名 modify 字段名 新数据类型 (长度);图形化界面操作:

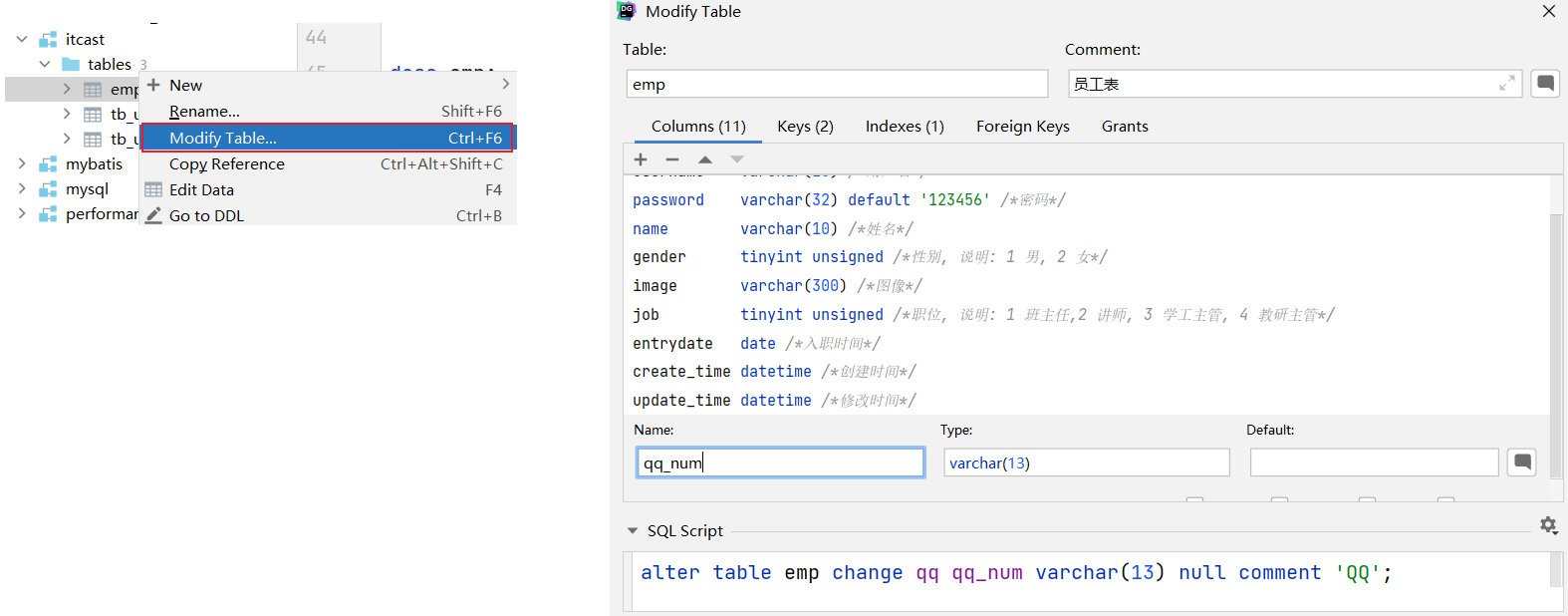
3). 修改字段名和字段类型
alter table 表名 change 旧字段名 新字段名 类型 (长度) [ comment 注释 ] [ 约束 ];比如:修改qq字段名为 qq_num,字段类型varchar(13)
alter table emp change qq qq_num varchar(13) comment 'QQ';图形化界面操作:
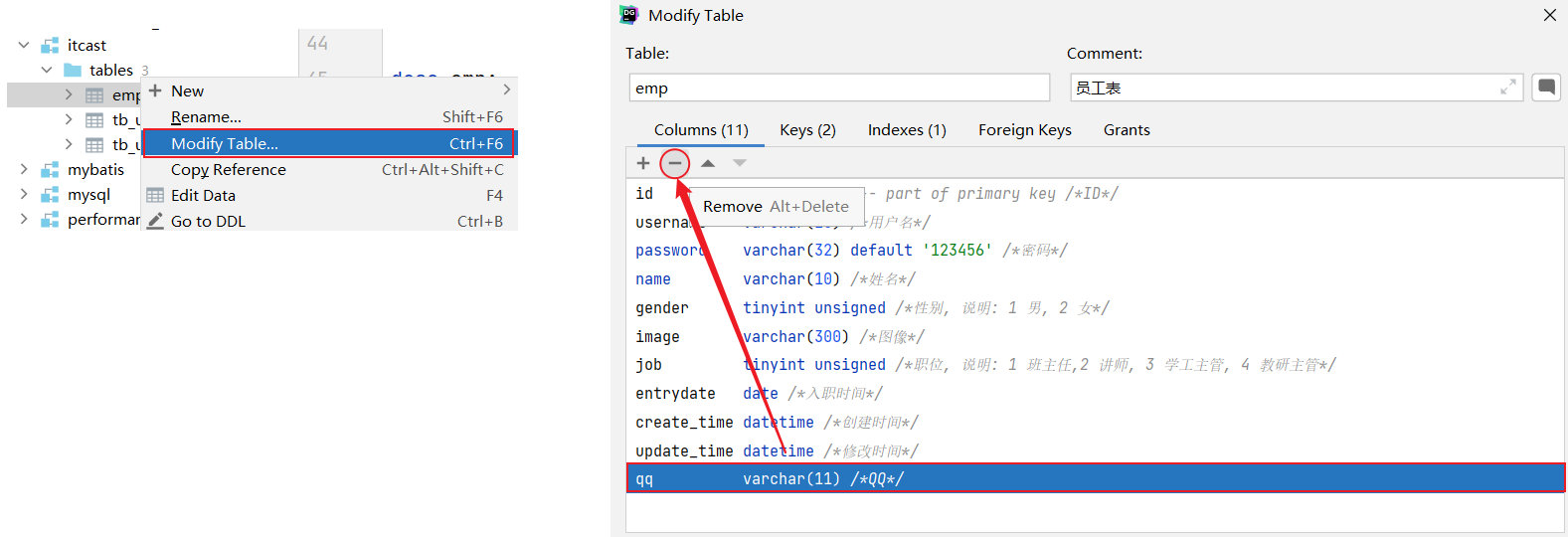
4). 删除字段
alter table 表名 drop 字段名;比如:删除employee表中的qq_num字段
alter table emp drop qq_num;
图形化界面操作:
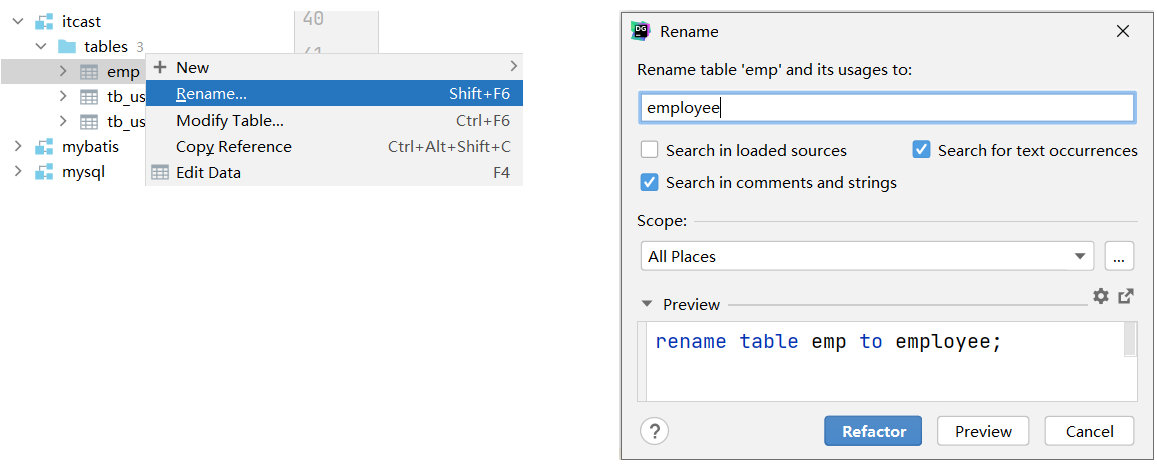
5). 修改表名
rename table 表名 to 新表名;比如:将当前的emp表的表名修改为employee
rename table emp to employee;图形化界面:
4.2.4 删除
关于表结构的删除操作,工作中一般都是直接基于图形化界面操作。
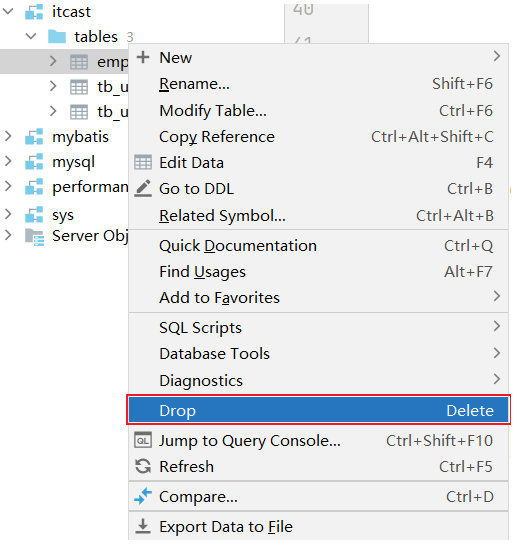
1). 删除表
drop table [ if exists ] 表名;可选项 if exists 代表,只有表名存在时才会删除该表,表名不存在,则不执行删除操作(如果不加该参数项,删除一张不存在的表,执行将会报错)。
案例:
如果user表存在,则删除user表
drop table if exists user;图形化界面操作:
2). 删除指定表, 并重新创建表
truncate table 表名;注意: 在删除表的时候,表中的全部数据也都会被删除。
本章节,我们主要讲解了通过DDL语句如何操作数据库及表结构,已经通过页面原型及需求文档设计表结构,那这部分都是属于数据库设计方面的能力。数据库及表结构我们已经设计好了,那接下来呢,我们就需要来讲解第二部分,通过SQL语句操作数据库表结构中的数据。
3. 数据库操作-DML
DML英文全称是Data Manipulation Language(数据操作语言),用来对数据库中表的数据记录进行增、删、改操作。
- 添加数据(INSERT)
- 修改数据(UPDATE)
- 删除数据(DELETE)
3.1 增加(insert)
1). 给指定字段添加数据
insert into 表名 (字段名1, 字段名2, ...) values (值1, 值2, ...);- 案例: 给emp表的指定字段添加数据 ;
insert into emp (username, name, gender, create_time, update_time) VALUES ('jinmaoshiwang','谢逊',1,now(),now());插入数据完成之后,我们有两种方式,查询数据库的数据:
A. 方式一
在左侧的表名上双击,就可以查看这张表的数据。

B. 方式二
可以直接通过一条查询数据的SQL语句, 语句如下:
select * from emp;- 案例: 给emp表所有的字段添加数据
执行如下SQL,添加的 username 字段值为jinmaoshiwangjinmaoshiwang,超过20位。
insert into emp (username, name, gender, create_time, update_time) VALUES ('jinmaoshiwangjinmaoshiwang','谢逊2',1,now(),now());执行上述的SQL语句时,报错了,具体的错误信息如下:

因为 emp 表的 username字段类型为varchar(20),最多只能存储20个字符 ,如果存储的字符串长度超过20,将会报错。
2). 给全部字段添加数据
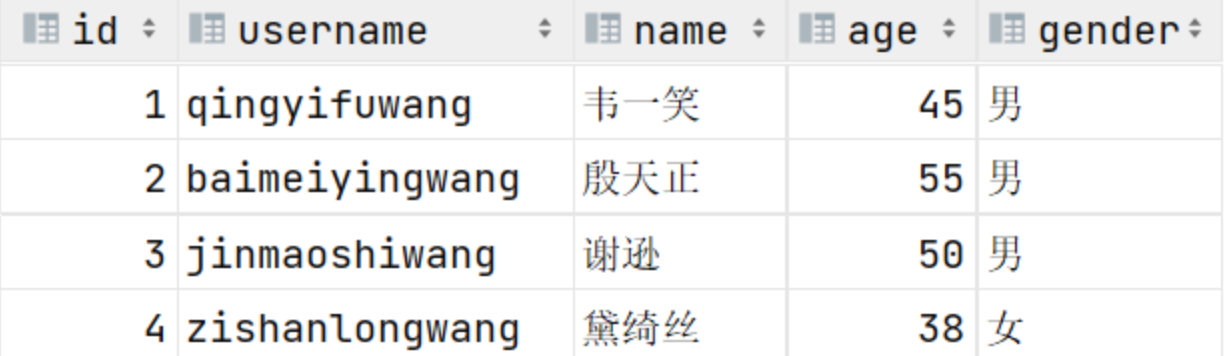
INSERT INTO 表名 VALUES (值1, 值2, ...);案例:插入数据到employee表,具体的SQL如下:
insert into emp VALUES (null,'qingyifuwang','123456','韦一笑',1,'1.jpg',1,'2005-01-01',now(),now());注意:执行上述SQL语句插入数据时,字段顺序必须与values后面指定的字段值的顺序完全一致。
3). 批量添加数据
insert into 表名 (字段名1, 字段名2, ...) values (值1, 值2, ...), (值1, 值2, ...), (值1, 值2, ...) ;insert into 表名 values (值1, 值2, ...), (值1, 值2, ...), (值1, 值2, ...) ;案例:批量插入数据到employee表,具体的SQL如下:
insert into emp VALUES (null,'baimeiyingwang','123456','殷天正',1,'1.jpg',1,'2005-01-01',now(),now()),(null,'zishanlongwang','123456','黛绮丝',1,'2.jpg',1,'2005-01-01',now(),now());注意事项:
• 插入数据时,指定的字段顺序需要与值的顺序是一一对应的。
• 字符串和日期型数据应该包含在引号中。
• 插入的数据大小,应该在字段的规定范围内。
3.2 修改(update)
修改数据的具体语法为:
update 表名 set 字段名1 = 值1 , 字段名2 = 值2 , .... [ where 条件 ] ;案例:
A. 修改id为1的数据,将username修改为itheima1
update emp set username = 'itheima1' where id = 1;B. 修改id为1的数据, 将name修改为黑马1
update emp set name = '黑马1' , update_time = now() where id = 1;C. 将所有的员工的状态修改为1
update emp set gender = 1, update_time = now();注意事项:
A. 修改语句的条件可以有,也可以没有,如果没有条件,则会修改整张表的所有数据。
B. 在修改数据时,一般需要同时修改公共字段update_time,将其修改为当前操作时间。
3.3 删除(delete)
删除数据的具体语法为:
delete from 表名 [ where 条件 ] ;案例:
A. 删除gender为2的员工
delete from emp where gender = 2;B. 删除所有员工
delete from emp;注意事项:
• DELETE 语句的条件可以有,也可以没有,如果没有条件,则会删除整张表的所有数据。
• DELETE 语句不能删除某一个字段的值(可以使用UPDATE,将该字段值置为NULL即可)。
• 当进行删除全部数据操作时,datagrip会提示我们,询问是否确认删除,我们直接点击Execute即可。