邵阳网站建设上科互联温州网站建设免费咨询
文章目录
- 原因
- 检查
- 解决步骤
- 修改jdk
- 修改SpringBoot版本
原因
出现这种错误的原因可能是:
-
本机默认使用(编译)的jdk与该项目所使用的jdk版本不同。
-
jdk版本不适用于这个Idea,很典型的一个例子就是使用的Idea是2020的,而你用到的jdk是17,jdk17是2021年推出的,所以你只能去安装新版本的idea。
-
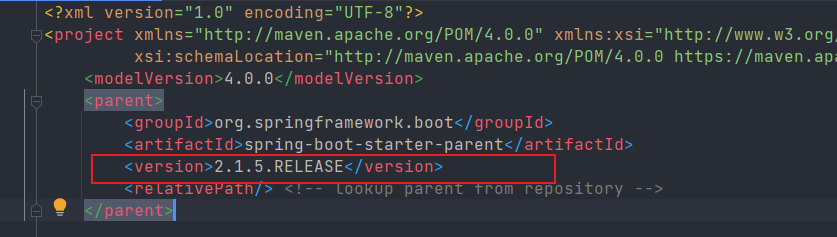
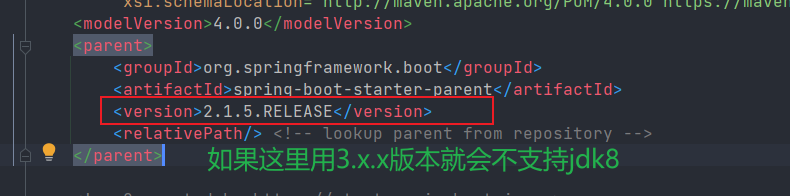
有时候SpringBoot版本太高不支持java8, 用java8的话得用低版本, 如下2.1.5可以用, 别的可以再查查
检查
该项目用的是什么版本的jdk请打开pom.xml查看:
1.修改项目使用的jdk版本,但是如果本来使用的是17,你降级为8,就可能导致某些代码不能实现。 (具体内容请看下面)
2.安装新版本的Idea从而可以使用新的jdk。

解决步骤
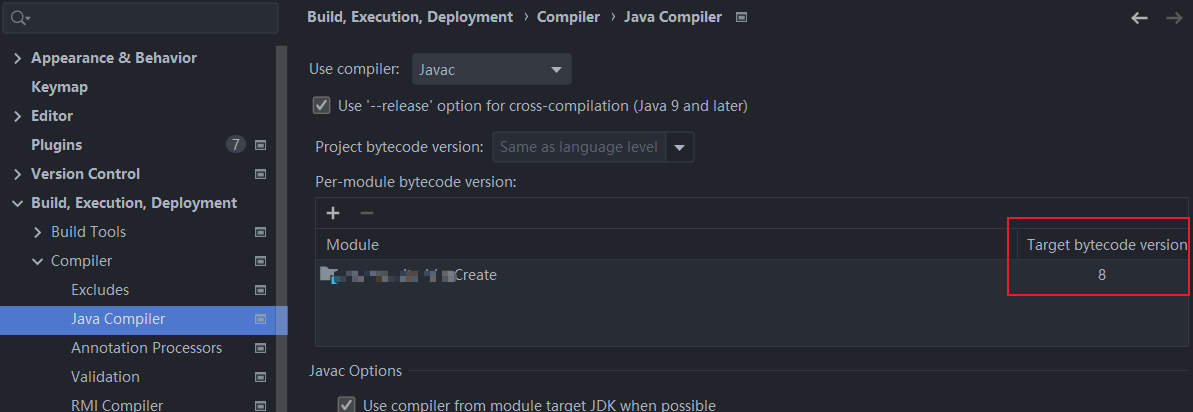
修改jdk
按如下路径找到java compiler, 以下这改成8(我的jdk是1.8,如果你的是别的版本,就改成对应版本)
下一步 ,file里找到project structure
如下图,可以看到我使用的jdk版本是1.8
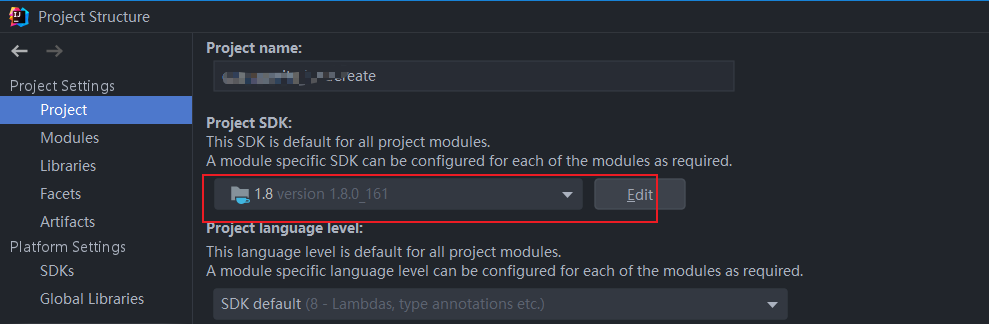
此处对应选择8
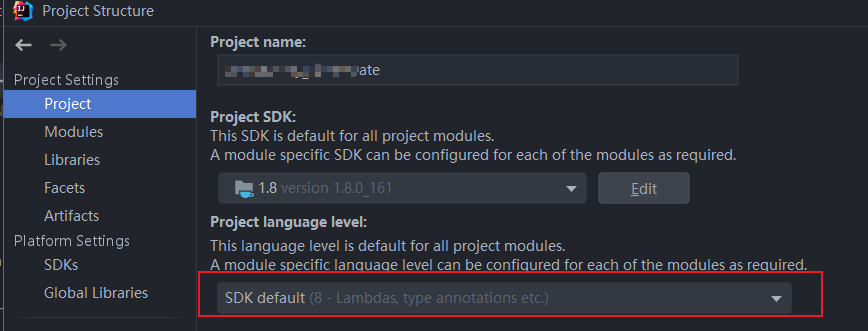
接下来在Modules里将红色框里改成8(截图中我还没改,这是我报错的原因)

点击OK,重新编译就OK啦。
当你重导maven项目的之后,再编译可能还会遇到这个问题,按照上面的办法修改即可,也可以直接去修改pom.xml配置文件,这样子就不会再出现版本问题了。
修改SpringBoot版本
修改pom.xml文件的配置信息
根据报错的信息提供的内容,它说的是某个版本太高需要修改。
参考(侵删):
IDEA编译报错:Error:java: 无效的源发行版: 17,一次搞定