网站建设和维护公司国外风格网站
此教程仅适用于演示站有留言的主题,演示站没有留言的主题,就别往下看了,免费浪费时间。
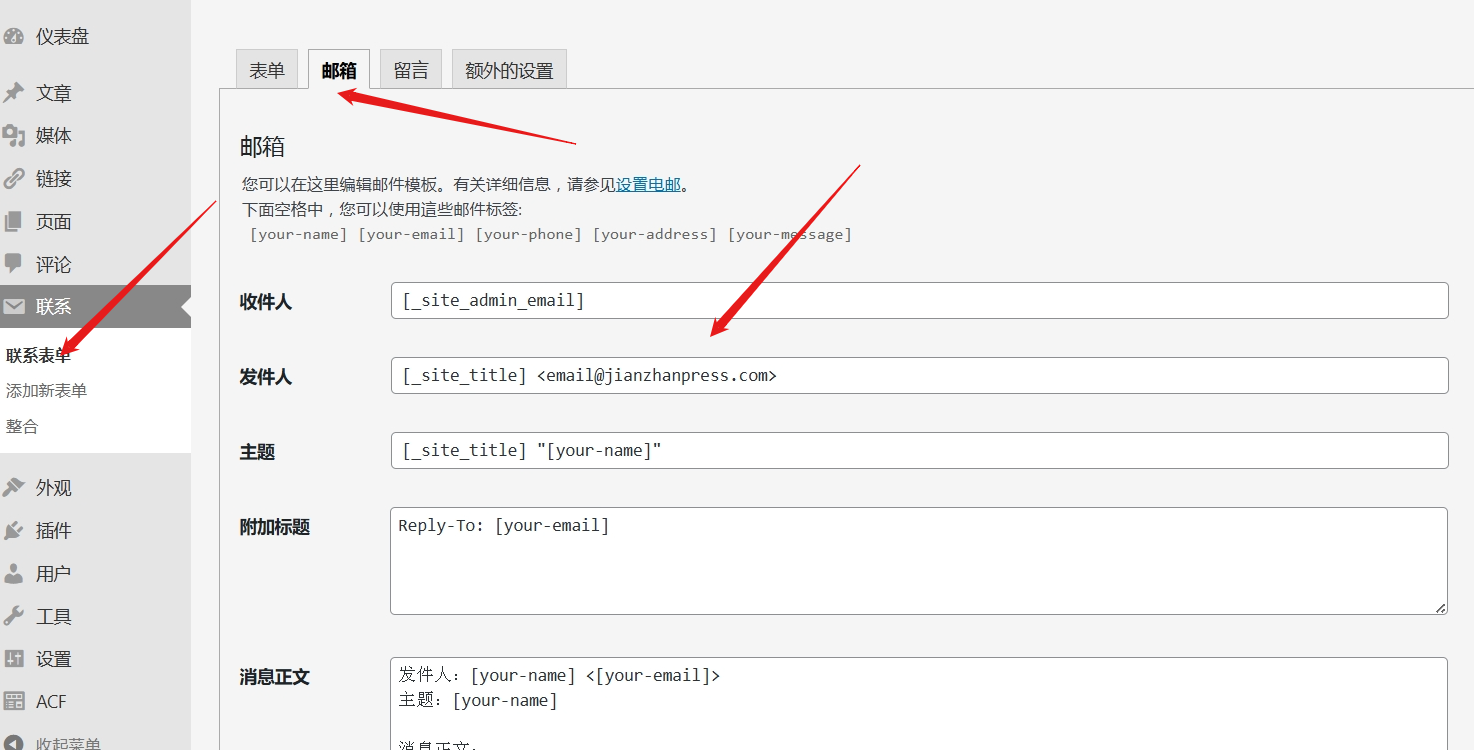
使用了Contact form 7插件的简站WordPress主题,在有人留言时,就会发邮件到网站的系统邮箱(一般与管理员邮箱为同一个)里。上面显示的发件人邮箱也为系统邮箱。如果不让想发件人邮箱显示为系统邮箱,想要发件人邮箱显示为域名邮箱,可以修改如下图所示的位置,把管理员邮箱改为以域名为后缀的邮箱。
原文
https://www.jianzhanpress.com/?p=7397