做生物卷子的网站网页传奇挂机脚本
MySQL高可用
Hi,我是阿昌,今天学习记录的是关于MySQL高可用的内容。
正常情况下,只要主库执行更新生成的所有 binlog,都可以传到备库并被正确地执行,备库就能达到跟主库一致的状态,这就是最终一致性。但是,MySQL 要提供高可用能力,只有最终一致性是不够的。为什么这么说呢?
一、主备延迟
主备切换 可能是一个主动运维动作,比如软件升级、主库所在机器按计划下线等,也可能是被动操作,比如主库所在机器掉电。
一个概念,即“同步延迟”。与数据同步有关的时间点主要包括以下三个:
- 主库 A 执行完成一个事务,写入 binlog,把这个时刻记为 T1;
- 之后传给备库 B,把备库 B 接收完这个 binlog 的时刻记为 T2;
- 备库 B 执行完成这个事务,把这个时刻记为 T3。
所谓主备延迟,就是同一个事务,在备库执行完成的时间和主库执行完成的时间之间的差值,也就是 T3-T1。
可以在备库上执行 show slave status 命令,它的返回结果里面会显示 seconds_behind_master,用于表示当前备库延迟了多少秒。
seconds_behind_master 的计算方法是这样的:
- 每个事务的 binlog 里面都有一个时间字段,用于记录主库上写入的时间;
- 备库取出当前正在执行的事务的时间字段的值,计算它与当前系统时间的差值,得到 seconds_behind_master。
可以看到,其实 seconds_behind_master 这个参数计算的就是 T3-T1。
所以,可以用 seconds_behind_master 来作为主备延迟的值,这个值的时间精度是秒。
如果主备库机器的系统时间设置不一致,会不会导致主备延迟的值不准?其实不会的。
因为,备库连接到主库的时候,会通过执行 SELECT UNIX_TIMESTAMP() 函数来获得当前主库的系统时间。
如果这时候发现主库的系统时间与自己不一致,备库在执行 seconds_behind_master 计算的时候会自动扣掉这个差值。
需要说明的是,在网络正常的时候,日志从主库传给备库所需的时间是很短的,即 T2-T1 的值是非常小的。
也就是说,网络正常情况下,主备延迟的主要来源是备库接收完 binlog 和执行完这个事务之间的时间差。
所以说,主备延迟最直接的表现是,备库消费中转日志(relay log)的速度,比主库生产 binlog 的速度要慢。
二、主备延迟的来源
首先,有些部署条件下,备库所在机器的性能要比主库所在的机器性能差。
一般情况下,有人这么部署时的想法是,反正备库没有请求,所以可以用差一点儿的机器。
或者,他们会把 20 个主库放在 4 台机器上,而把备库集中在一台机器上。
其实都知道,更新请求对 IOPS 的压力,在主库和备库上是无差别的。
所以,做这种部署时,一般都会将备库设置为“非双 1”的模式。但实际上,更新过程中也会触发大量的读操作。
所以,当备库主机上的多个备库都在争抢资源的时候,就可能会导致主备延迟了。当然,这种部署现在比较少了。
因为主备可能发生切换,备库随时可能变成主库,所以主备库选用相同规格的机器,并且做对称部署,是现在比较常见的情况。
追问 1:但是,做了对称部署以后,还可能会有延迟。这是为什么呢?
这就是第二种常见的可能了,即备库的压力大。
一般的想法是,主库既然提供了写能力,那么备库可以提供一些读能力。
或者一些运营后台需要的分析语句,不能影响正常业务,所以只能在备库上跑。
真就见过不少这样的情况。由于主库直接影响业务,大家使用起来会比较克制,反而忽视了备库的压力控制。
结果就是,备库上的查询耗费了大量的 CPU 资源,影响了同步速度,造成主备延迟。
这种情况,一般可以这么处理:
- 一主多从。除了备库外,可以多接几个从库,让这些从库来分担读的压力。
- 通过 binlog 输出到外部系统,比如 Hadoop 这类系统,让外部系统提供统计类查询的能力。
其中,一主多从的方式大都会被采用。因为作为数据库系统,还必须保证有定期全量备份的能力。而从库,就很适合用来做备份。
追问 2:采用了一主多从,保证备库的压力不会超过主库,还有什么情况可能导致主备延迟吗?
这就是第三种可能了,即`大事务。大事务这种情况很好理解。因为主库上必须等事务执行完成才会写入 binlog,再传给备库。
所以,如果一个主库上的语句执行 10 分钟,那这个事务很可能就会导致从库延迟 10 分钟
不知道所在公司的 DBA 有没有跟你这么说过:不要一次性地用 delete 语句删除太多数据。
其实,这就是一个典型的大事务场景。比如,一些归档类的数据,平时没有注意删除历史数据,等到空间快满了,业务开发人员要一次性地删掉大量历史数据。
同时,又因为要避免在高峰期操作会影响业务(至少有这个意识还是很不错的),所以会在晚上执行这些大量数据的删除操作。
结果,负责的 DBA 同学半夜就会收到延迟报警。然后,DBA 团队就要求你后续再删除数据的时候,要控制每个事务删除的数据量,分成多次删除。
另一种典型的大事务场景,就是大表 DDL。
追问 3:如果主库上也不做大事务了,还有什么原因会导致主备延迟吗?
造成主备延迟还有一个大方向的原因,就是备库的并行复制能力。
三、可靠性优先策略
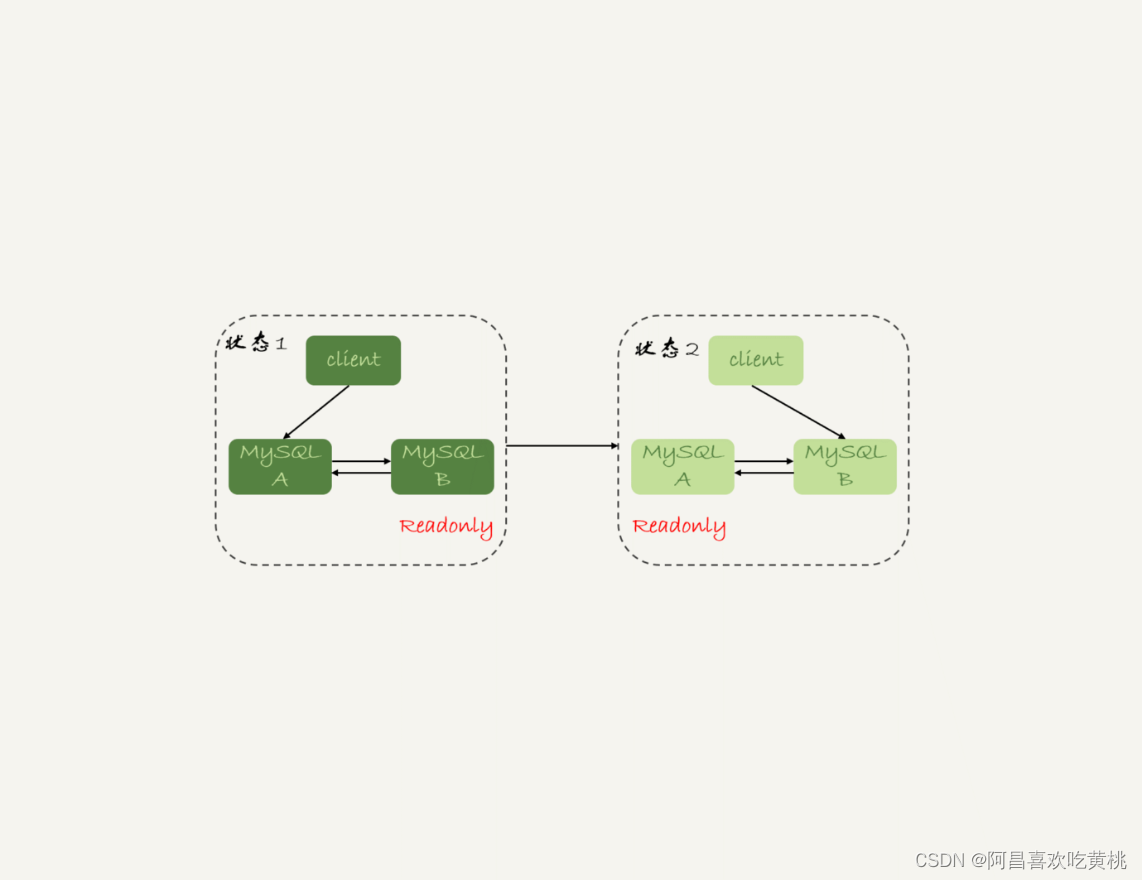
在图 1 的双 M 结构下,从状态 1 到状态 2 切换的详细过程是这样的:
- 判断备库 B 现在的 seconds_behind_master,如果小于某个值(比如 5 秒)继续下一步,否则持续重试这一步;
- 把主库 A 改成只读状态,即把 readonly 设置为 true;
- 判断备库 B 的 seconds_behind_master 的值,直到这个值变成 0 为止;
- 把备库 B 改成可读写状态,也就是把 readonly 设置为 false;
- 把业务请求切到备库 B。
这个切换流程,一般是由专门的 HA 系统来完成的,暂时称之为可靠性优先流程。

备注:图中的 SBM,是 seconds_behind_master 参数的简写。可以看到,这个切换流程中是有不可用时间的。
因为在步骤 2 之后,主库 A 和备库 B 都处于 readonly 状态,也就是说这时系统处于不可写状态,直到步骤 5 完成后才能恢复。
在这个不可用状态中,比较耗费时间的是步骤 3,可能需要耗费好几秒的时间。
这也是为什么需要在步骤 1 先做判断,确保 seconds_behind_master 的值足够小。
试想如果一开始主备延迟就长达 30 分钟,而不先做判断直接切换的话,系统的不可用时间就会长达 30 分钟,这种情况一般业务都是不可接受的。
当然,系统的不可用时间,是由这个数据可靠性优先的策略决定的。
也可以选择可用性优先的策略,来把这个不可用时间几乎降为 0。
四、可用性优先策略
如果强行把步骤 4、5 调整到最开始执行,也就是说不等主备数据同步,直接把连接切到备库 B,并且让备库 B 可以读写,那么系统几乎就没有不可用时间了。把这个切换流程,暂时称作可用性优先流程。
这个切换流程的代价,就是可能出现数据不一致的情况。
分享一个可用性优先流程产生数据不一致的例子。
假设有一个表 t:
mysql> CREATE TABLE `t` (`id` int(11) unsigned NOT NULL AUTO_INCREMENT,`c` int(11) unsigned DEFAULT NULL,PRIMARY KEY (`id`)
) ENGINE=InnoDB;insert into t(c) values(1),(2),(3);
这个表定义了一个自增主键 id,初始化数据后,主库和备库上都是 3 行数据。
接下来,要继续在表 t 上执行两条插入语句的命令,依次是:
insert into t(c) values(4);
insert into t(c) values(5);
假设,现在主库上其他的数据表有大量的更新,导致主备延迟达到 5 秒。
在插入一条 c=4 的语句后,发起了主备切换。
图 3 是可用性优先策略,且 binlog_format=mixed 时的切换流程和数据结果。
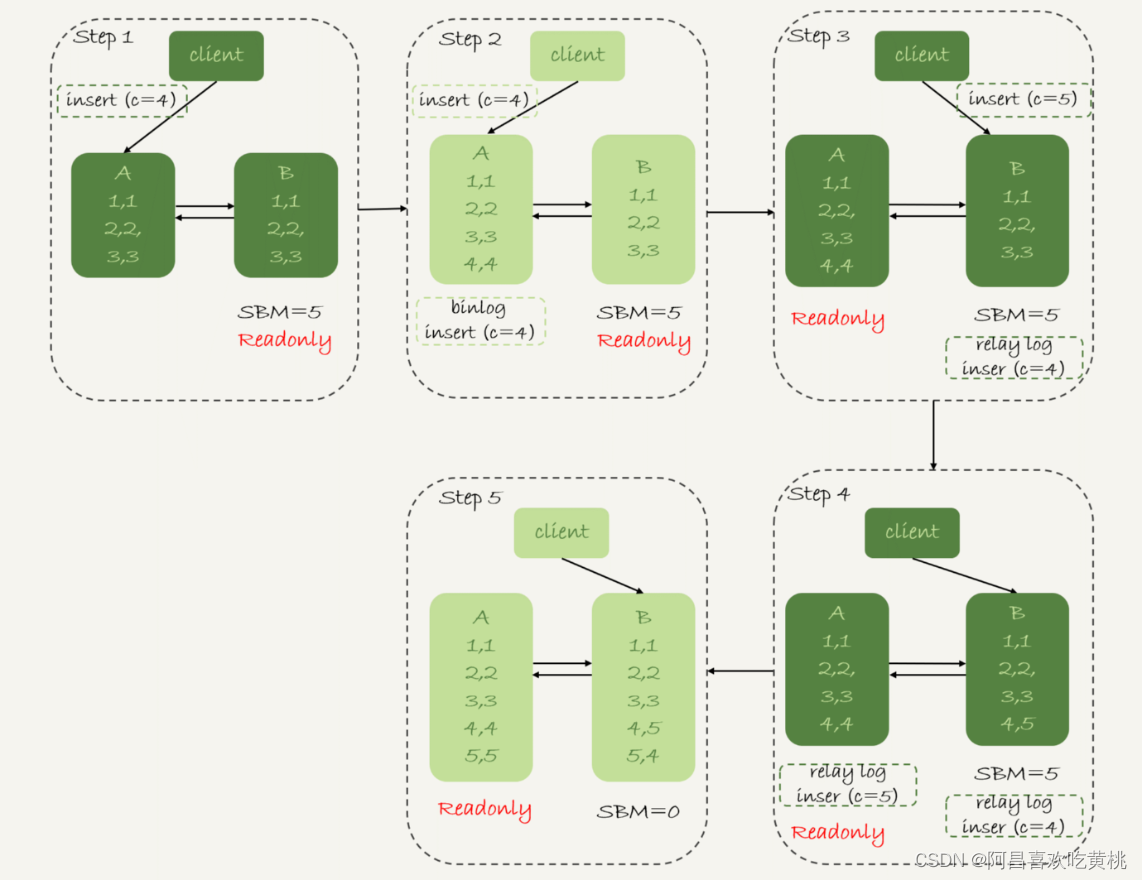
现在,一起分析下这个切换流程:
- 步骤 2 中,主库 A 执行完 insert 语句,插入了一行数据(4,4),之后开始进行主备切换。
- 步骤 3 中,由于主备之间有 5 秒的延迟,所以备库 B 还没来得及应用“插入 c=4”这个中转日志,就开始接收客户端“插入 c=5”的命令。
- 步骤 4 中,备库 B 插入了一行数据(4,5),并且把这个 binlog 发给主库 A。
- 步骤 5 中,备库 B 执行“插入 c=4”这个中转日志,插入了一行数据(5,4)。而直接在备库 B 执行的“插入 c=5”这个语句,传到主库 A,就插入了一行新数据(5,5)。
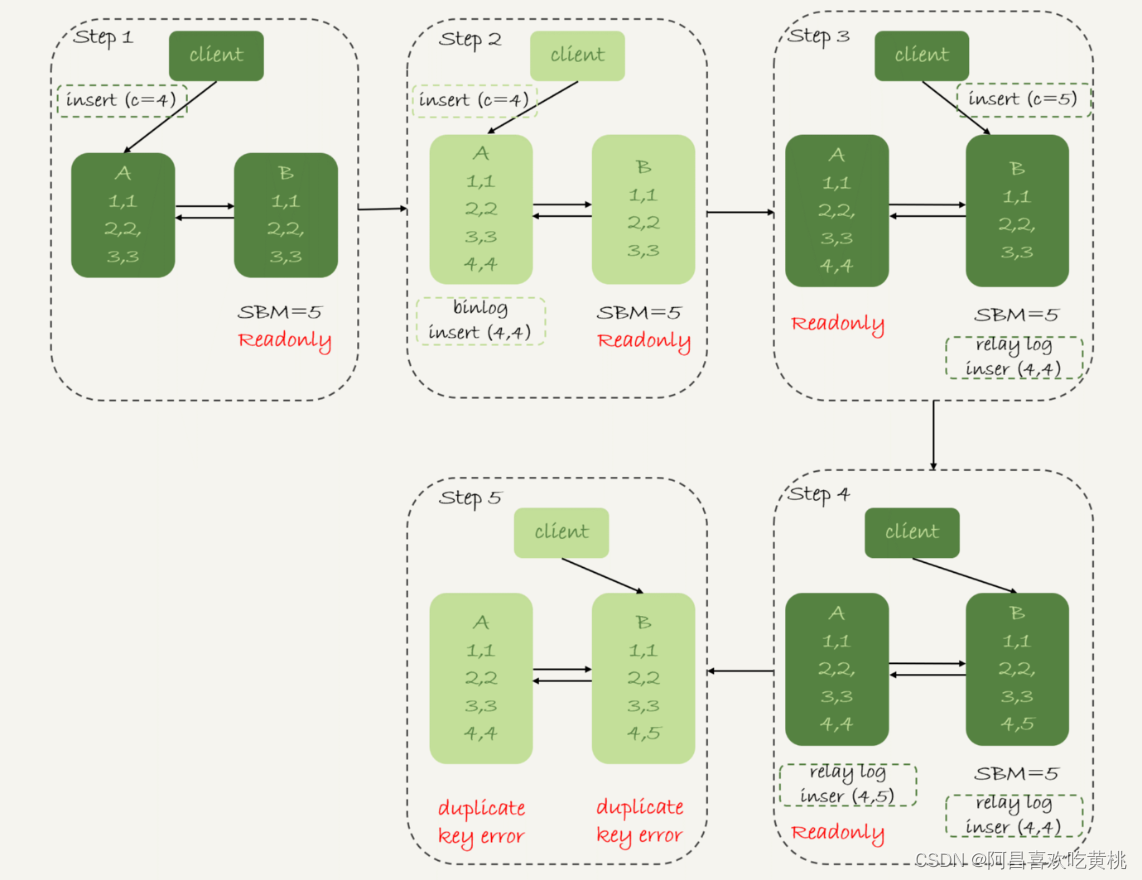
最后的结果就是,主库 A 和备库 B 上出现了两行不一致的数据。可以看到,这个数据不一致,是由可用性优先流程导致的。那么,如果我还是用可用性优先策略,但设置 binlog_format=row,情况又会怎样呢?
因为 row 格式在记录 binlog 的时候,会记录新插入的行的所有字段值,所以最后只会有一行不一致。而且,两边的主备同步的应用线程会报错 duplicate key error 并停止。
也就是说,这种情况下,备库 B 的 (5,4) 和主库 A 的 (5,5) 这两行数据,都不会被对方执行。
图 4 中画出了详细过程,分析一下。
从上面的分析中,可以看到一些结论:
- 使用 row 格式的 binlog 时,数据不一致的问题更容易被发现。而使用 mixed 或者 statement 格式的 binlog 时,数据很可能悄悄地就不一致了。如果过了很久才发现数据不一致的问题,很可能这时的数据不一致已经不可查,或者连带造成了更多的数据逻辑不一致。
- 主备切换的可用性优先策略会导致数据不一致。
因此,大多数情况下,都建议使用可靠性优先策略。毕竟对数据服务来说的话,数据的可靠性一般还是要优于可用性的。
但事无绝对,有没有哪种情况数据的可用性优先级更高呢?答案是,有的。曾经一个场景:
- 有一个库的作用是记录操作日志。这时候,如果数据不一致可以通过 binlog 来修补,而这个短暂的不一致也不会引发业务问题。
- 同时,业务系统依赖于这个日志写入逻辑,如果这个库不可写,会导致线上的业务操作无法执行。
这时候,你可能就需要选择先强行切换,事后再补数据的策略。
当然,事后复盘的时候,想到了一个改进措施就是,让业务逻辑不要依赖于这类日志的写入。
也就是说,日志写入这个逻辑模块应该可以降级,比如写到本地文件,或者写到另外一个临时库里面。
这样的话,这种场景就又可以使用可靠性优先策略了。
按照可靠性优先的思路,异常切换会是什么效果?
假设,主库 A 和备库 B 间的主备延迟是 30 分钟,这时候主库 A 掉电了,HA 系统要切换 B 作为主库。
在主动切换的时候,可以等到主备延迟小于 5 秒的时候再启动切换,但这时候已经别无选择了。
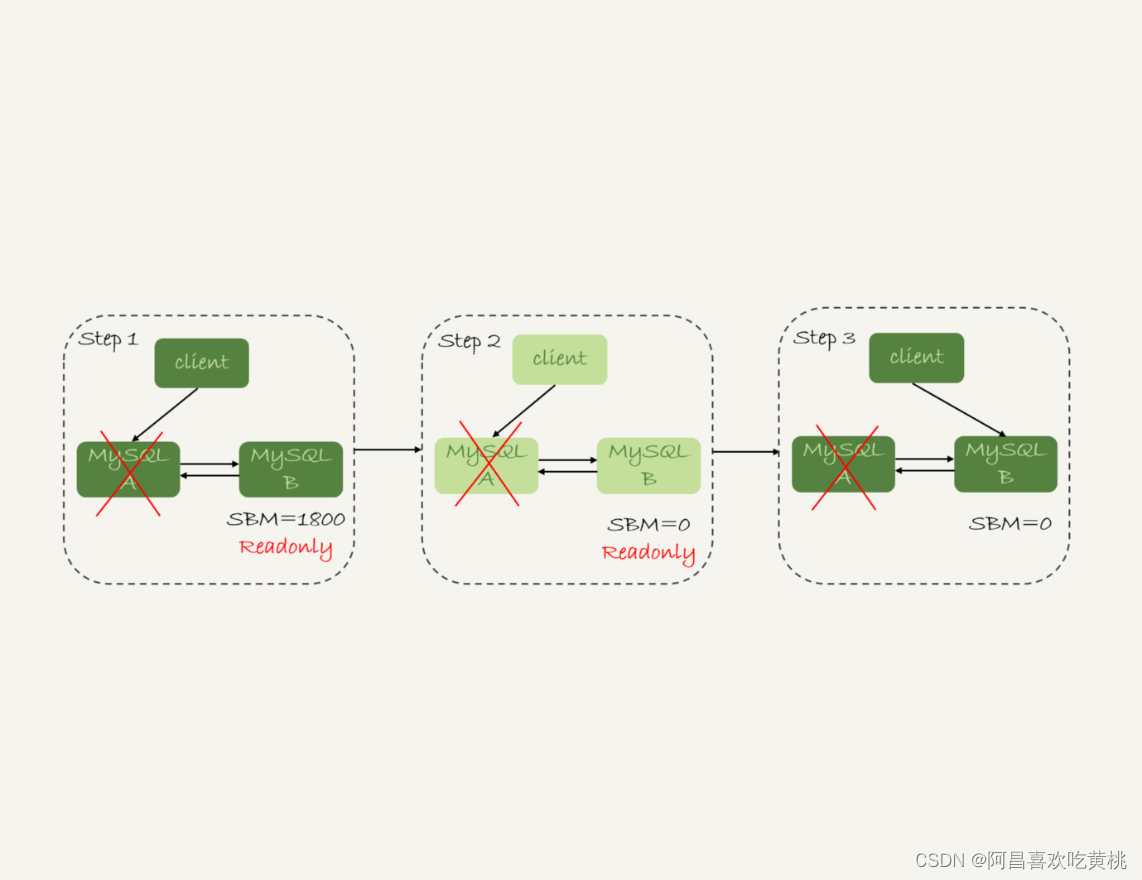
采用可靠性优先策略的话,就必须得等到备库 B 的 seconds_behind_master=0 之后,才能切换。
但现在的情况比刚刚更严重,并不是系统只读、不可写的问题了,而是系统处于完全不可用的状态。因为,主库 A 掉电后,连接还没有切到备库 B。
那能不能直接切换到备库 B,但是保持 B 只读呢?这样也不行。
因为,这段时间内,中转日志还没有应用完成,如果直接发起主备切换,客户端查询看不到之前执行完成的事务,会认为有“数据丢失”。
虽然随着中转日志的继续应用,这些数据会恢复回来,但是对于一些业务来说,查询到“暂时丢失数据的状态”也是不能被接受的。
在满足数据可靠性的前提下,MySQL 高可用系统的可用性,是依赖于主备延迟的。延迟的时间越小,在主库故障的时候,服务恢复需要的时间就越短,可用性就越高。
五、问题
一般现在的数据库运维系统都有备库延迟监控,其实就是在备库上执行 show slave status,采集 seconds_behind_master 的值。假设,现在你看到你维护的一个备库,它的延迟监控的图像类似图 6,是一个 45°斜向上的线段,觉得可能是什么原因导致呢?又会怎么去确认这个原因呢?

现象描述: > 主备延迟最直接的表现是备库消费中转日志(relay log)的速度比主库生产binlog日志的速度要慢。 导致上述现象的可能原因有如下几种:
- 有些部署条件下,备库所在机器的性能要比主库所在机器性能要差;
-
- 备库压力大
-
- 大事务(一次性delete删除大量数据和大表DDL)
-
- 备库的并行复制能力
针对性确认思路:
- 观察主备库所在机器的是否一致。
-
- 观察备库所在机器的CPU资源占用情况。
-
- 通过从库的
show slave status来查看主从同步延迟情况,如果时间太长则可以认为有大事务,反之则没有。
- 通过从库的
-
- 待确认。