品牌网站策划书外贸网站建设课本
上一周实在是过得太颓废了,我感觉还是要把自己的规划做好一下:
周计划
这周截至周四,我可以用vue简单的画完登陆注册的界面并且弄一点预处理:
周一
的话可以把这些都学一下:
父传子,子传父:
<script setup>// 1.给子组件以添加属性的方式传值
// 2.在子组件通过props的方式接受
// 对于局部组件,导入进来就能用
import testDemo1 from './components/test-demo1.vue';
import{ref} from 'vue';
const money=ref(100);
const getMoney=()=>
{money.value+=10;
}
const changeFf=(newMoney)=>{money.value=newMoney;
}
</script><template>
<h3>我是父组件---{{ money }}</h3>
<!-- 给子组件添加属性的方式传值 -->
<testDemo1 car="宝马"
:money="money"
@changeMoney="changeFf"></testDemo1>
<button @click="getMoney"></button>
<!-- 也可以动态传递子属性数据 -->
money
</template><script setup>
// 注意:由于写了setup,所以无法配置props选项
// 借助编译器宏函数接受子组件传递的数据,是编译阶段的一个标识,实际编译器解析后遇到后会进行编译转换
const emit=defineEmits(['changeMoney']);
const props=defineProps({car:String,money:Number
})
const buy=()=>
{//单向流需要emit去触发事件emit('changeMoney',5);}
console.log(props.car)
</script><template><div class="son">我是子组件---{{ car }}-----{{ money }}<button @click="buy">花钱</button></div></template><style scoped>
.son{padding: 30px;border: red solid 1px;
}</style>defineExpose和模板引用 :
默认在setup语法糖下是不开放组件内部的方法和属性的,可以通过defineExpose向外暴露;
<script setup>
import { onMounted, ref } from 'vue';
import testDemo2 from './components/test-demo2-copy.vue';
// 模板引用(可以获取dom,也可以获取组件)
/* 1.调用ref函数,创建ref对象
2。通过ref标识,进行绑定
通过ref对象,.value即可访问绑定的元素(必须渲染完成后才能拿到) */
const inp=ref(null);
//-------------------------------------
const testRef=ref(null);const getCom=()=>{console.log(testRef.value.count);}//生命周期钩子
onMounted(()=>{console.log(inp.value)inp.value.focus();
});
</script><template><input ref="inp" type="text">
<button>点击让输入框聚焦</button>
<testDemo2 ref="testRef"></testDemo2>
<button @click="getCom">获取组件</button></template><script setup>
import { ref } from 'vue';
const count=ref(999);
const sayHi=()=>
{console.log("你好呀");
}
defineExpose({// 使用宏向外暴露sayHi,count
});</script><template><div>我是用于测试的组件--{{ count }}</div></template>同时去搜索了一下vue里面响应式和非响应式的数据有什么区别: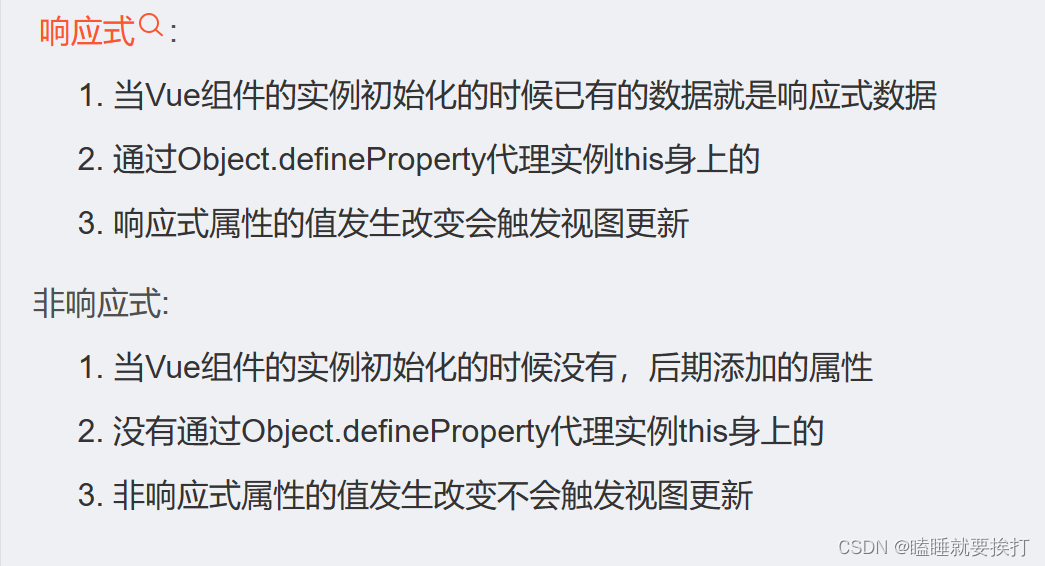
provide和inject:
从顶层组件向任意底层组件传递数据和方法:

<script setup>
import centerCom from '@/components/center-com.vue'
import {ref,provide} from 'vue'//跨层级传递普通数据
provide('theme-color','小冏');//跨层级传递响应式数据
const count=ref(100);
provide('count',count);//跨层级传递函数
provide('changeCount',(newValue)=>
{count.value=newValue;
})</script><template><div><h1>我是顶层组件</h1></div><centerCom></centerCom>
</template><script setup>
import bottomCom from '@/components/bottom-com.vue'
</script><template><div><h2>我是中间组件</h2></div><bottomCom></bottomCom>
</template><script setup>
import { inject } from 'vue';
const themeColor=inject('theme-color');
const count=inject('count');
const changeCount=inject('changeCount');
const clickFn=()=>
{changeCount(500);
}
</script><template><div><h3>我是底层组件--{{ themeColor }}---{{ count }}</h3></div><button @click="clickFn">修改count</button></template>defineOptions:

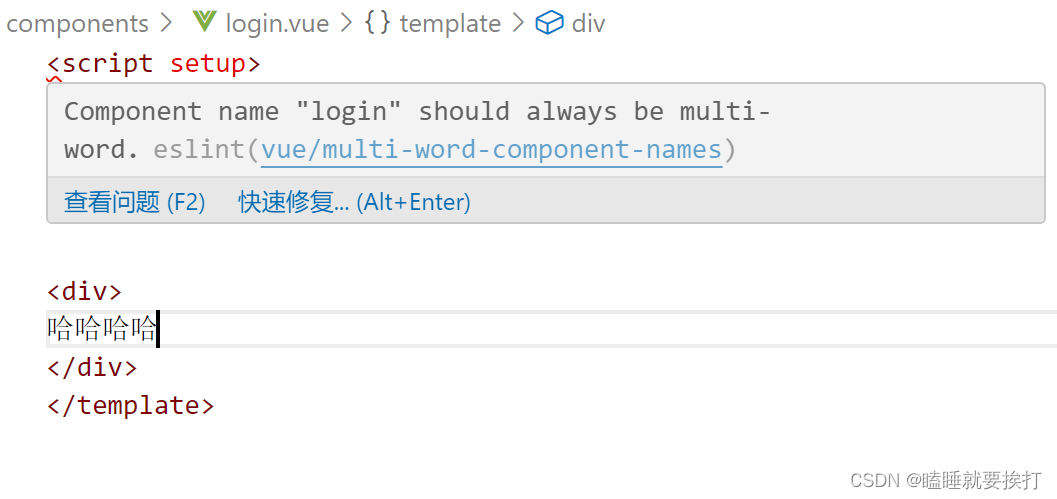
<script setup>
defineOptions({name:'loginIndex'
})
</script>
<template><div>
哈哈哈哈
</div>
</template>然后好奇的又搜了一下有关setup语法糖的作用:
Vue3.0的新语法糖-script setup - 知乎 (zhihu.com)
defineModel:
<script setup>
import myInput from './components/my-input.vue';
import { ref } from 'vue';
const counts=ref('123456');</script><template><div><div><myInput type="text" v-model="counts"></myInput>{{ counts }}
</div></div></template><script setup>
import { defineModel } from 'vue';
const modelValue=defineModel();
</script>
<template><div><input type="text" :value="modelValue"@input="e=>modelValue=e.target.value"></div>
</template>Pinia:
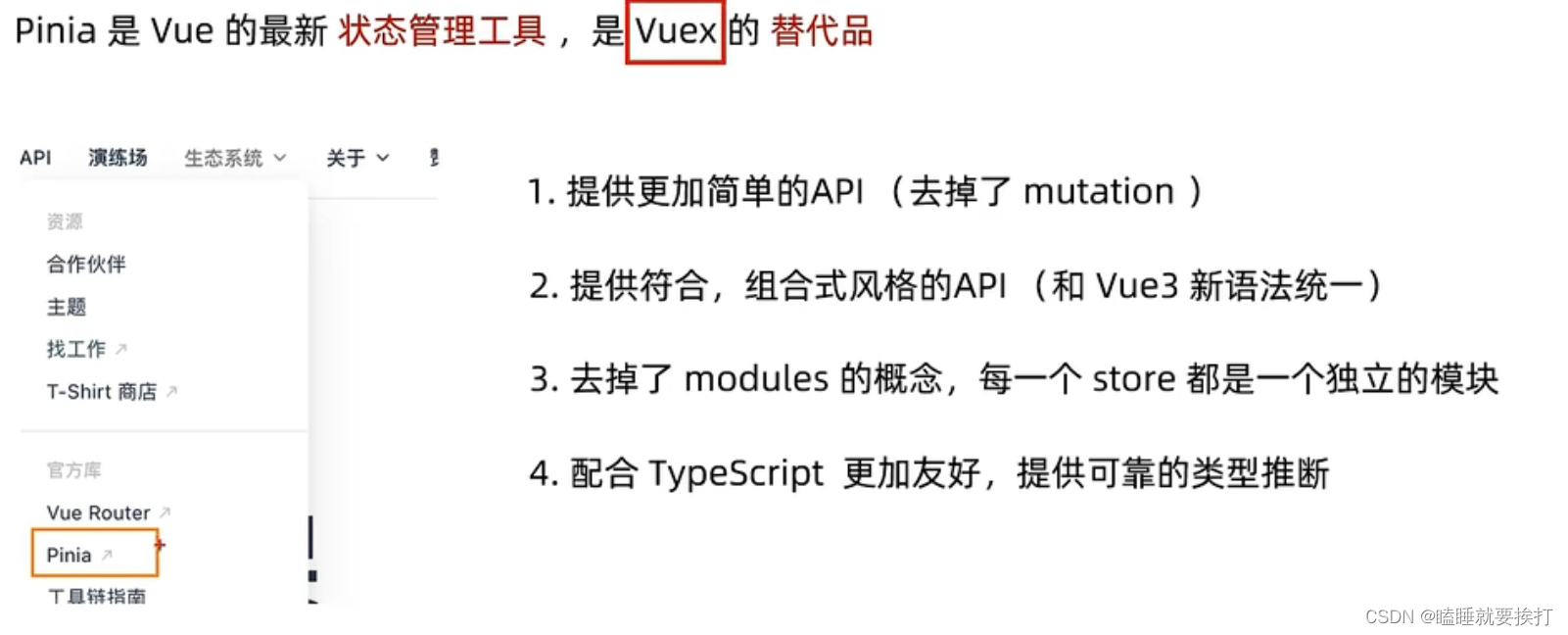
Pinia基本语法 :
<script setup>
import { useCountStore } from '../store/counter';
const counterStore=useCountStore();
</script><template>
<div> 我是son1{{ counterStore.count }}--<button @click="counterStore.addCount">+</button>
</div></template>
<style scoped></style>
<script setup>
import { useCountStore } from '../store/counter';
const counterStore=useCountStore();
</script>
<template>
<div>我是son2{{ counterStore.count }}--<button @click="counterStore.subCount">-</button>
</div></template>
<style scoped>
</style>
<script setup>
import sonCom1 from '@/components/sonCom1.vue'
import sonCom2 from '@/components/sonCom2.vue'
import {useCountStore} from '@/store/counter'const counterStore=useCountStore();
console.log(counterStore);
</script><template>
<div><h3>根组件-{{counterStore.count}}</h3>
<sonCom1></sonCom1>
<sonCom2></sonCom2></div></template>
<style scoped></style>
import { defineStore } from "pinia";
import { ref } from "vue";
//定义store
//仓库里面修改数据都是靠导出来修改的
export const useCountStore=defineStore('counter',()=>
{//声明数据 state-countconst count=ref(0);//声明操作数据的方法-actionsconst addCount=()=>{count.value++}const subCount=()=>{count.value--;}//声明基于数据派生的计算属性gettersreturn {count,addCount,subCount}});
pinia-action异步写法:
数据库的作业:

周二:
上午词汇,下午翻译训练;
周三
写一下java作业以及上午词汇训练
周四:
上午词汇训练,下午范文复习
明天和意外,我永远不知道哪个先发生。。。
其实这几天多了很多其它的事情,所以进度直接跳到周天:
周日:
录题,数据库作业,各种作业
保证书:
对于时长除了每天3.5小时*6=21小时
大概每天可以拿出一个半小时多余时间出来自习:1.5*6=9小时
然后周六2+3=5小时可以用来自习,还有周二没什么课几乎1小时
21+9+5+1=36小时一周;
刷题的话我打算用c++,但是还不会,力扣也没怎么刷过,所以先试试一周写五道题;
功能点:
第三周的时候开始写项目,在此之前会先用vue先画一下登陆注册的界面和前端;