海通建设集团有限公司网站引擎搜索有哪些
UML类图中各箭头表示总结
- 1、泛化
- 2、实现
- 3、依赖
- 4、关联
- 5、聚合
- 6、组合
在UML类图中,箭头关系是用来表示类之间的关系的。箭头关系的种类有以下几种:
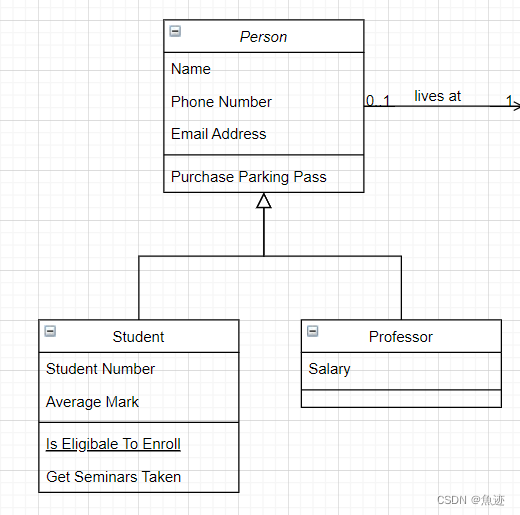
1、泛化
- 泛化:表示类之间的继承关系。箭头从子类指向父类。
- 箭头:实线空心三角箭头
如下图所示,Person为父类,Student和Professor为子类
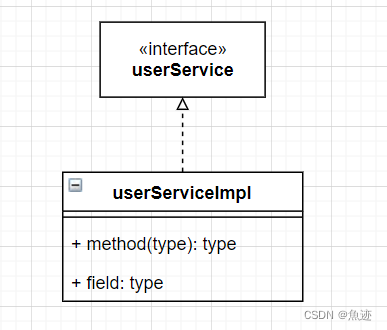
2、实现
- 实现: 表示类之间的实现关系。箭头从子类指向接口,表示子类实现了接口的所有方法。
- 箭头: 虚线空心三角箭
如下图所示:
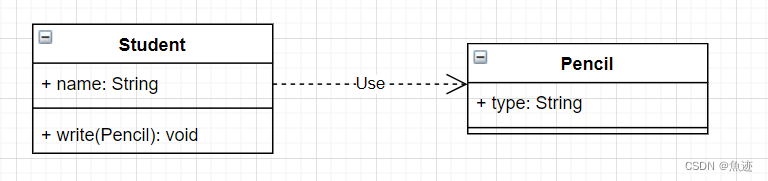
3、依赖
- 依赖: 表示类之间的依赖关系。 通常指的是某个类中的方法的参数使用另一个类的对象。箭头从使用类到被用类,表示一个类需要另一个类来完成它的相关任务。
- 箭头: 虚线箭头
如下图所示;
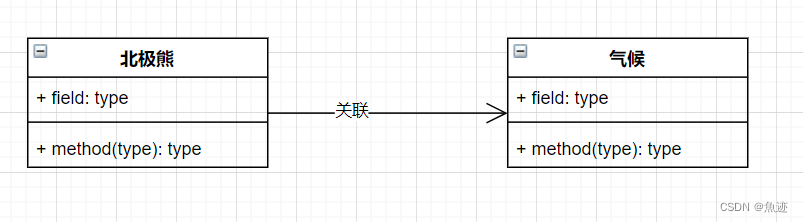
4、关联
- 关联: 表示类之间的关联关系。箭头表示类之间的一种连接关系。
- 箭头: 实线箭头
如下图所示:
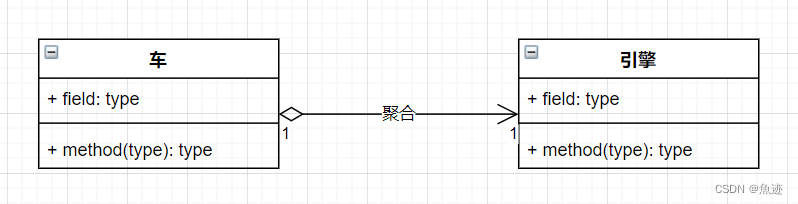
5、聚合
描述的是整体和部分的关系,整体生命周期结束并不代表部分声明周期的结束。
- 聚合: 表示类之间的聚合关系。箭头从聚合类指向被聚合类,表示一个类包含另一个类的对象。
- 箭头: 空心菱形实线箭头,菱形指向被聚合类,箭头指向聚合类
如下图所示:
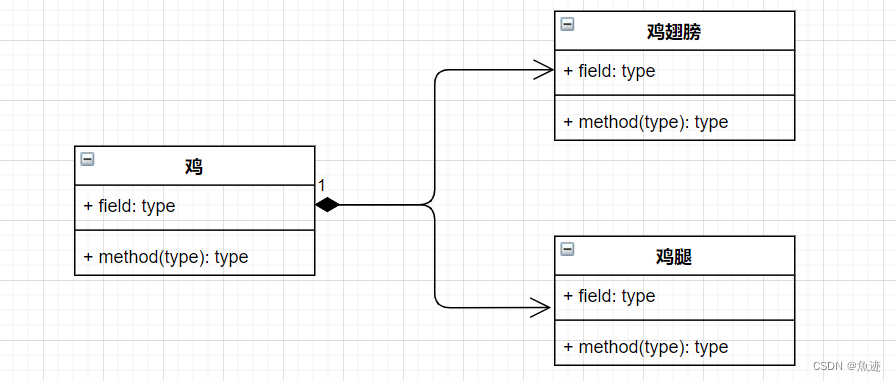
6、组合
整体和部分的关系,整体生命周期结束,部分的声明周期也结束。比如一只毛毛虫死了,毛毛虫的腿部分也是死的。
- **组合:**表示类之间的组合关系。箭头从组合类指向被组合类,表示一个类包含另一个类的对象,同时控制对象的生命周期。
- 箭头: 实心菱形实线箭头
如下图所示: