网站新闻百度收录网站设计二级页面怎么做
一、Teradata FS-LDM
Teradata 公司基于金融业务发布的FS-LDM(Financial Servies Logical Data Model)
十大主题:当事人、产品、协议、事件、资产、财务、机构、地域、营销、渠道。
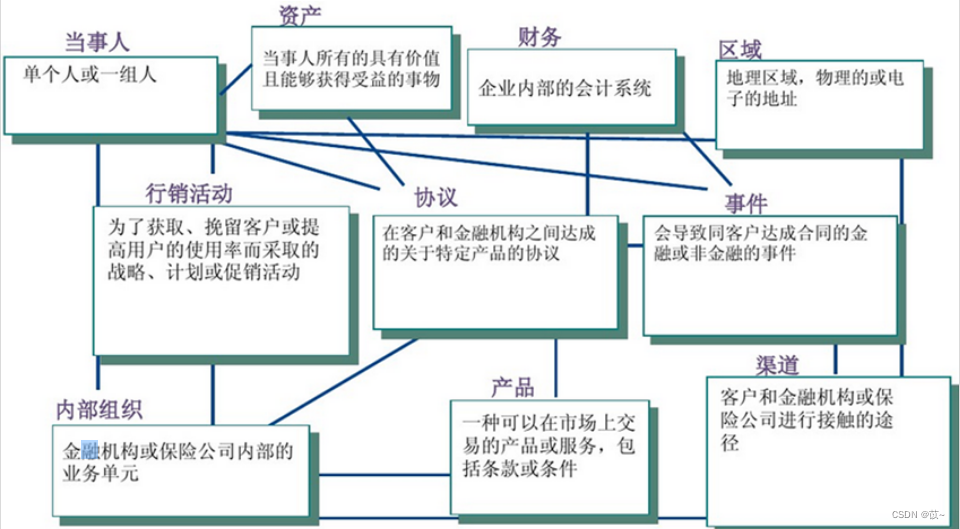
1、当事人(Party)
银行所服务的任意对象和感兴趣进行分析的各种对象。如个人或公司客户、潜在客户、代理机构、雇员、分行、部门等。一个PARTY可以同时是这当中许多种角色。
2、产品(Product)
为拓展市场占有率,满足客户更广泛需求而制定的可营销的交易品种的集合,产品是金融机构向用户销售的或提供给客户所使用的服务。
3、协议(Agreement)
金融机构与当事人之间针对某种特定产品或服务而签立的契约关系。它可以是多样化的,如帐户、客户和银行签订的合同等。当金融机构与客户之间针对某种产品或服务的条款和条件达成协议时,一个协议(AGREEMENT)就会被开立,因此协议是客户和银行往来的重要载体。
4、事件(Event)
银行与客户或潜在客户之间的联系或交易活动,它记录了详细的行为和交易数据,包括存取款、收费、计息、咨询投诉、查询、市场调查、网上交易等。既可以与资金相关,也可以与资金无关;既可以有客户参与,也可以没有客户参与;既可以与帐户相关,也可以与帐户无关;可以由客户发起,也可以由银行发起。通过事件可以帮助了解哪些客户使用哪些渠道做哪种交易事件,交易金额多少、什么时间、在什么地点、与金融机构的哪位员工或部门打交道。
5、资产(Asset)
可能采集到的客户的资产(负债)信息,也包括银行向外租赁的资产信息。这些信息的来源很多情况下是在客户申请贷款时所提供的各种担保品信息、抵质押品信息等。
6、财务(Finance)
包括银行的总帐信息,是描述科目组织、控制、内部核算等银行核心科目帐务以及预算管理有关的内容。该主题抽象地描述了银行内部帐务的组织模式,能够适应不同的科目组织体系。
7、内部组织(Internal Org)
金融机构或保险公司的内部的业务单元。它可能是银行内部的组织机构(如分行、支行、网点、部门等),也可能是任何一个法人机构当事人的内部组织,严格意义上这些也是一种特殊的PARTY。
8、地域(Location)
是希望观察和分析的任何区域,既包括传统类型的地址信息(如国家、地区、城市、区县、街道等),又包括如电话信息、邮箱、黄页等电子地址信息。
9、营销(Campaign)
一些有组织的活动,其目的可以是为了把某些产品推向市场,也有可能是为了树立银行在市场上的形象;完整的营销活动应该包括营销策略、营销行为以及营销活动的反馈信息;收集营销活动的信息可以帮助银行发现最有效的营销方式,了解不同类型客户对营销活动的反馈。
10、渠道(Channel)
当各种事件发生时,当事双方(主要是指客户和银行)进行交互和接触的手段及方法,通过它客户与银行进行接触、购买产品、使用服务并交流信息。
二、IBM - BDWM
IBM提出了著名的 BDWM(Banking Date Warehouse Model)九大金融主题模型,主题模型分为参与人、合约、条件、产品、地点、分类、业务方向、事件和资源项目。
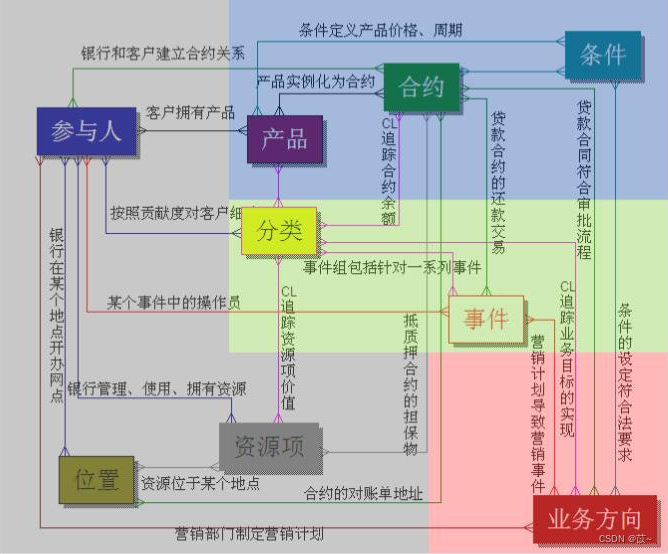
1、关系人(IP)
银行的业务开展过程中的相关各方,个人、机构、柜员
2、合约(AR)
参与者之间达成的 合约、合同、协议等
3、条件(CD)
描述银行的业务正常开展,所需要的前提条件、资格标准和要求
4、产品(PD)
产品是为客户所提供,以换取利润的产品和服务,产品也包括合作伙伴或竞争对手的产品和服务,是金融机构销售或提供的可市场化的产品、组合产品和服务。
5、地点(LO)
参与人相关的所有地址,如家庭地址、公司地址、邮政信箱、电话号码、电子地址、网址等或地理位置区域。
6、分类(CL)
适用于其它数据概念的分类或者分组。
7、业务方向(BD)
银行或参与人开展业务所在的环境和方式
8、事件(EV)
是参与人和银行的交互,以及银行内部的业务交互,它包含最详细的行为和交易数据,例如存款、提款、付款、信用/借记卡年费、利息和费用、投诉、查询、网上交易等
9、资源项目(RI)
是银行有形或无形的有价值资源项目,是银行拥有,管理,使用的,或支持特定业务目的的。