专业做外贸网站公司Wordpress链接的index
Vi 和 Vim 编辑器
vi 和 vim 的基本介绍
Linux 系统会内置 vi 文本编辑器
Vim 具有程序编辑的能力,可以看做是 Vi 的增强版本,可以主动的以字体颜色辨别语法的正确性,方便程序设计。
代码补完、编译及错误跳转等方便编程的功能特别丰富,在程序员中被广泛使用。
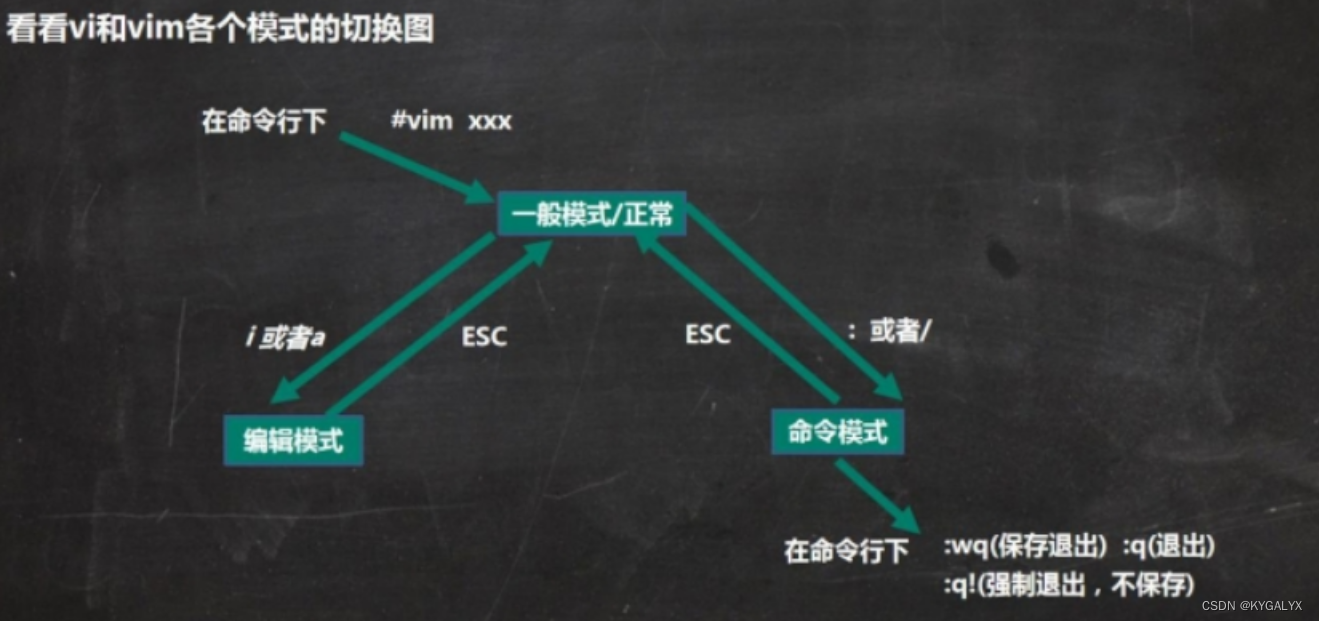
vi 和 vim 常用的三种模式
- 正常模式
- 以 vim 打开一个档案就直接进入一般模式了(这是默认的模式)。在这个模式中, 你可以使用『上下左右』按键来移动光标,你可以使用『删除字符』或『删除整行』来处理档案内容, 也可以使用『复制、粘贴』来处理你的文件数据。
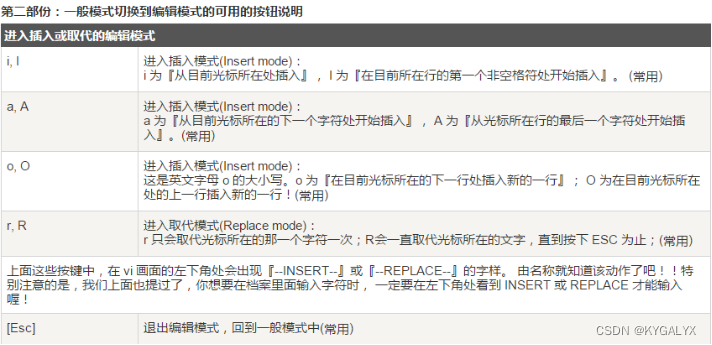
- 插入模式
- 按下 i, I, o, O, a, A, r, R 等任何一个字母之后才会进入编辑模式, 一般来说按 i 即可.
- 命令行模式
- 输入 esc 再输入:在这个模式当中, 可以提供你相关指令,完成读取、存盘、替换、离开 vim 、显示行号等的动作则是在此模式中达成的!
vi 和 vim 快捷键
- 拷贝当前行yy , 拷贝当前行向下的 5 行 5yy,并粘贴(输入 p)。
- 删除当前行 dd , 删除当前行向下的 5 行 5dd
- 在文件中查找某个单词 [命令行下 /关键字 , 回车 查找 , 输入 n 就是查找下一个 ]
- 设置文件的行号,取消文件的行号.[命令行下 : set nu 和 :set nonu]
- 编辑 /etc/profile 文件,在一般模式下, 使用快捷键到该文档的最末行[G]和最首行[gg]
- 在一个文件中输入 “hello” ,在一般模式下, 然后又撤销这个动作 u
- 编辑 /etc/profile 文件,在一般模式下, 并将光标移动到 , 输入 20,再输入 shift+g