前端网站制作教程茂名网站制作维护
1. vector底层实现机制刨析:
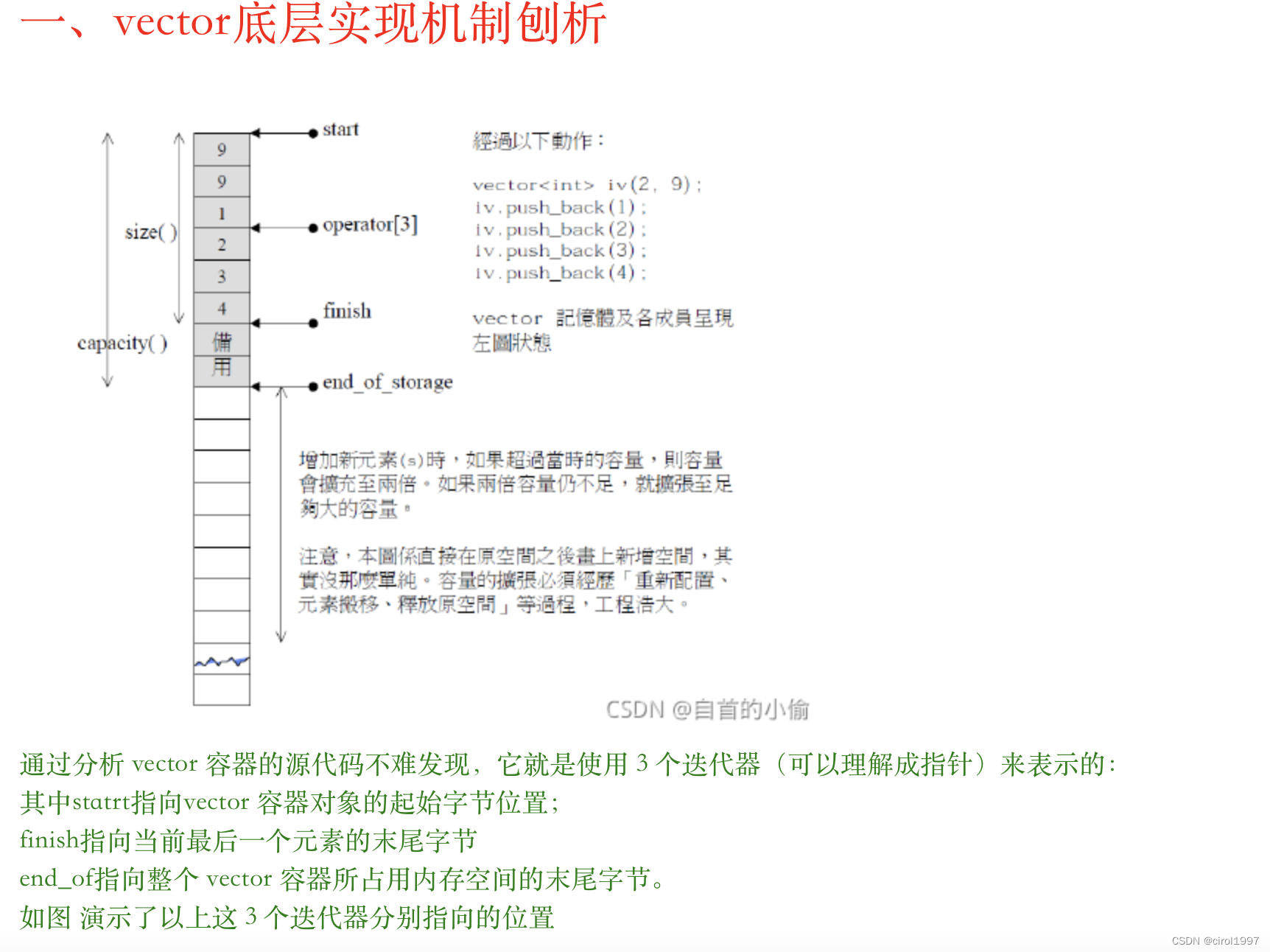
简述:使用三个迭代器表示的:
这也就解释了,为什么 vector 容器在进行扩容后,与其相关的指针、引用以及迭代器可能会失效的原因。
insert
整体向后移
erase
整体向前移
size 变化会重新reserve
2. emplace_back()和push_back()的区别
emplace_back() 和 push_back() 的区别,就在于底层实现的机制不同。push_back() 向容器尾部添加元素时,首先会创建这个元素,然后再将这个元素拷贝或者移动到容器中(如果是拷贝的话,事后会自行销毁先前创建的这个元素);而 emplace_back() 在实现时,则是直接在容器尾部创建这个元素,省去了拷贝或移动元素的过程。
3. 避免不必要的扩容:
那既然扩容会影响程序的运行效率,那我们如何来避免呢?
在插入元素之前,我们可以预估vector里面要存储多少个元素,我们提前将这个空间给它开辟好就可以了!!!
比如说,我们需要向vector中插入100个元素,在执行push_back之前,我们进行reserver预留空间,只要空间大小给的足够,在整个插入的过程中就不需要进行任何的扩容!
4. 减小不必要的容量
1 . shrink_to_fit()
2 . Swap
如果想用 swap() 成员方法去除当前 vector 容器多余的容量时,可以套用如下的语法格式:
vector(x).swap(x);
1. #include <iostream>
2. #include <vector>
3. using namespace std;
4.
5. int main()
6. {
7. vector<int>myvector;
8. //手动为 myvector 扩容
9. myvector.reserve(1000);
10. cout << "1、当前 myvector 拥有 " << myvector.size() << " 个元素,容量为 " << myvector.capacity() << endl;
11. //利用 myvector 容器存储 10 个元素
12. for (int i = 1; i <= 10; i++) {
13. myvector.push_back(i);
14. }
15. //将 myvector 容量缩减至 10
16. vector<int>(myvector).swap(myvector);
17. cout << "2、当前 myvector 拥有 " << myvector.size() << " 个元素,容量为 " << myvector.capacity() << endl;
18. return 0;
19. }
输出:
1、当前 myvector 拥有 0 个元素,容量为 1000
2、当前 myvector 拥有 10 个元素,容量为 10
显然,第 16 行代码成功将 myvector 容器的容量 1000 修改为 10,此行代码的执行流程可细分为以下 3 步:
- 先执行 vector(myvector),此表达式会调用 vector 模板类中的拷贝构造函数,从而创建出一个临时的 vector 容器(后续称其为 tempvector)。
值得一提的是,tempvector 临时容器并不为空,因为我们将 myvector 作为参数传递给了复制构造函数,该函数会将 myvector 容器中的所有元素拷贝一份,并存储到 tempvector 临时容器中。
注意,vector 模板类中的拷贝构造函数只会为拷贝的元素分配存储空间。换句话说,tempvector 临时容器中没有空闲的存储空间,其容量等于存储元素的个数。 - 然后借助 swap() 成员方法对 tempvector 临时容器和 myvector 容器进行调换,此过程不仅会交换 2 个容器存储的元素,还会交换它们的容量。换句话说经过 swap() 操作,myvetor 容器具有了 tempvector 临时容器存储的所有元素和容量,同时 tempvector 也具有了原 myvector 容器存储的所有元素和容量。
- 当整条语句执行结束时,临时的 tempvector 容器会被销毁,其占据的存储空间都会被释放。注意,这里释放的其实是原 myvector 容器占用的存储空间。
经过以上 3 个步骤,就成功的将 myvector 容器的容量由 100 缩减至 10。
当 swap() 成员方法用于清空 vector 容器时,可以套用如下的语法格式:
vector().swap(x);
4. vector < bool >
具体来讲,不推荐使用 vector 的原因有以下 2 个:
1. 严格意义上讲,vector<bool> 并不是一个 STL 容器;
2. vector<bool> 底层存储的并不是 bool 类型值。
值得一提的是,对于是否为 STL 容器,C++ 标准库中有明确的判断条件,其中一个条件是:如果 cont 是包含对象 T 的 STL 容器,且该容器中重载了 [ ] 运算符(即支持 operator[]),则以下代码必须能够被编译:
T *p = &cont[0];
此行代码的含义是,借助 operator[ ] 获取一个 cont 容器中存储的 T 对象,同时将这个对象的地址赋予给一个 T 类型的指针。
这就意味着,如果 vector 是一个 STL 容器,则下面这段代码是可以通过编译的:
//创建一个 vector 容器
vectorcont{0,1};
//试图将指针 p 指向 cont 容器中第一个元素
bool *p = &cont[0];
但不幸的是,此段代码不能通过编译。原因在于 vector 底层采用了独特的存储机制。
实际上,为了节省空间,vector 底层在存储各个 bool 类型值时,每个 bool 值都只使用一个比特位(二进制位)来存储。也就是说在 vector 底层,一个字节可以存储 8 个 bool 类型值。在这种存储机制的影响下,operator[ ] 势必就需要返回一个指向单个比特位的引用,但显然这样的引用是不存在的,等号左右两边出现冲突!
么,如果在实际场景中需要使用 vector< bool > 这样的存储结构,该怎么办呢?很简单,可以选择使用 deque< bool > 或者 bitset 来替代 vector。
要知道,deque 容器几乎具有 vecotr 容器全部的功能(拥有的成员方法也仅差 reserve() 和 capacity()),而且更重要的是,deque 容器可以正常存储 bool 类型元素。
还可以考虑用 bitset 代替 vector,其本质是一个模板类,可以看做是一种类似数组的存储结构。和后者一样,bitset 只能用来存储 bool 类型值,且底层存储机制也采用的是用一个比特位来存储一个 bool 值。