怎样在网站上做免费的推广四川省网站备案
一、ORM框架
当今企业级应用的开发环境中,对象和关系数据是业务实体的两种表现形式。业务实体在内存中表现为对象,在数据库中变现为关系数据。当采用面向对象的方法编写程序时,一旦需要访问数据库,就需要回到关系数据的访问方式,这种转换为开发人员带来了很大的麻烦。 ORM框架是一个对象-关系映射的系统化解决方案,当ORM框架完成转换后,开发人员可以直接取用对象。常用的ORM框架有Hibernate和MyBatis,其作用是将数据库查询的数据封装为实体类对象。

ORM框架将数据库查询到的数据封装为实体类对象,ORM映射流程如上图所示。从图中可以看出,实体类与数据库之间通过ORM框架相互映射,应用程序可以直接获取映射完成的实体类。
二、MyBatis简介
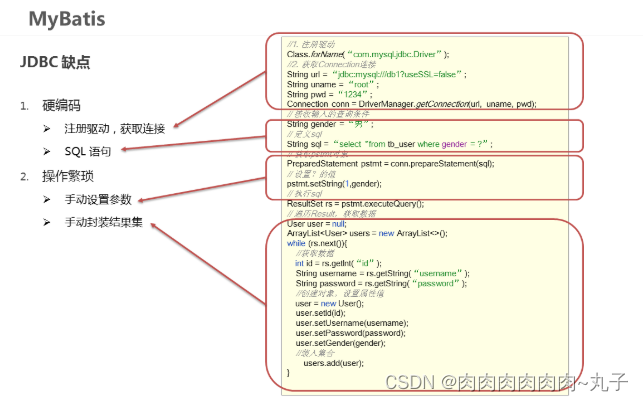
MyBatis 是一款优秀的持久层框架,它支持自定义 SQL、存储过程以及高级映射。MyBatis免除了几乎所有的 JDBC 代码以及设置参数和获取结果集的工作。MyBatis 可以通过简单的 XML 或注解来配置和映射原始类型、接口和 Java POJO(Plain Old Java Objects,普通老式 Java 对象)为数据库中的记录。

MyBatis解决的问题:

三、入门案例——实现步骤
1、创建一个基于Maven的java项目,添加mysql和MyBatis的依赖
<!-- mybatis的依赖 -->
<dependency><groupId>org.mybatis</groupId><artifactId>mybatis</artifactId><version>3.4.6</version>
</dependency>
<!-- mysql-connector-java 的依赖 -->
<dependency><groupId>mysql</groupId><artifactId>mysql-connector-java</artifactId><version>5.1.6</version>
</dependency>2、添加mybatis核心配置文件
<?xml version="1.0" encoding="UTF-8" ?>
<!DOCTYPE configurationPUBLIC "-//mybatis.org//DTD Config 3.0//EN""http://mybatis.org/dtd/mybatis-3-config.dtd">
<configuration><environments default="development"><environment id="development"><transactionManager type="JDBC"/><dataSource type="POOLED"><property name="driver" value="com.mysql.cj.jdbc.Driver"/><property name="url" value="jdbc:mysql://localhost:3306/ssm?serverTimezone=UTC"/><property name="username" value="root"/><property name="password" value="root"/></dataSource></environment></environments><mappers><mapper resource="UserMapper.xml"/></mappers>
</configuration>3、创建POJO实体类
package com.ambow.pojo;
// alt + 鼠标左键 整列编辑
public class User {private Integer id;private String username;private String password;private String gender;private String addr;//省略get,set方法//省略toString方法
}4、创建Mapper映射文件
<?xml version="1.0" encoding="UTF-8" ?>
<!DOCTYPE mapperPUBLIC "-//mybatis.org//DTD Mapper 3.0//EN""http://mybatis.org/dtd/mybatis-3-mapper.dtd">
<mapper namespace="test"><select id="selectUser" resultType="com.ambow.pojo.User">select * from tb_user</select>
</mapper>注意:映射文件直接放在resources根目录中。
? 映射文件完成对象和数据表之间的映射!
5、测试类
package com.ambow;import com.ambow.pojo.User;
import org.apache.ibatis.io.Resources;
import org.apache.ibatis.session.SqlSession;
import org.apache.ibatis.session.SqlSessionFactory;
import org.apache.ibatis.session.SqlSessionFactoryBuilder;import java.io.IOException;
import java.io.InputStream;
import java.util.List;public class MyBatisDemo {public static void main(String[] args) throws IOException {String resource = "mybatis-config.xml";InputStream inputStream = Resources.getResourceAsStream(resource);//获取SqlSessionFactory - 工厂对象SqlSessionFactory sqlSessionFactory = new SqlSessionFactoryBuilder().build(inputStream);//获取SqlSession - 连接对象SqlSession sqlSession = sqlSessionFactory.openSession();List<User> list = sqlSession.selectList("test.selectUser");for (User user : list) {System.out.println(user);}}
}四、使用Lombok简化POJO类的代码
(1)添加依赖
<dependency><groupId>org.projectlombok</groupId><artifactId>lombok</artifactId><version>1.18.24</version><scope>provided</scope>
</dependency>(2)在IDEA中安装lombok插件
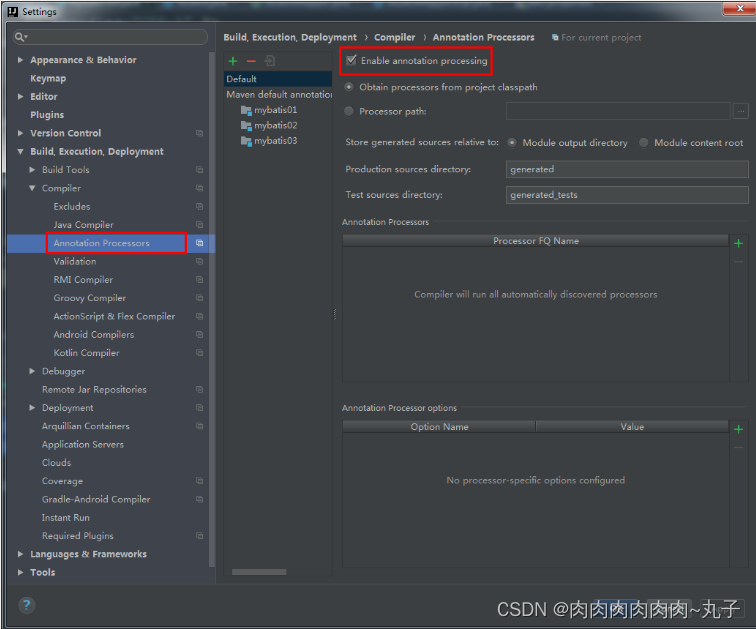
(3)在IDEA中配置 勾选 “enable annotation processing”
File--->Settings--->Build,Execution,Deployment --->Compiler--->Annotation Processors --->勾选 “enable annotation processing”
(4)修改POJO实体类代码:
@Data
@NoArgsConstructor
@AllArgsConstructor
public class User {private Integer id;private String username;private String password;private String gender;private String addr;
}5、使用Junit单元测试:
(1)引入依赖:
<dependency><groupId>junit</groupId><artifactId>junit</artifactId><version>4.12</version><scope>test</scope>
</dependency>(2)在测试类中,给方法添加@Test注解即可:
@Testpublic void test01() throws IOException {String resource = "mybatis-config.xml";InputStream inputStream = Resources.getResourceAsStream(resource);//获取SqlSessionFactory - 工厂对象SqlSessionFactory sqlSessionFactory = new SqlSessionFactoryBuilder().build(inputStream);//获取SqlSession - 连接对象SqlSession sqlSession = sqlSessionFactory.openSession();List<User> list = sqlSession.selectList("test.selectUser");for (User user : list) {System.out.println(user);}}在映射文件中的<mapper>元素中加入的映射信息(增删改查的元素),即SQL,如果需要参数,在sql中可以通过#{}来获取参数对象的属性。
注意事项!
${}和#{}的主要区别:
-
${}类似于原始JDBC中的Statement,采用的是拼接的方式生成sql语句,直接将${xxx}对应的内容直接拼接到sql语句中
-
#{}类似于原始JDBC中的PrepareStatement,采用占位符的方式,生成sql语句,会将#{xxx}对应的内容当做字符串的形式填入对应的占位符位置上。
-
当方法中传入的参数唯一时,可以不为此参数设置名称
-
在通过“#{}”或“${}”形式取用此参数时,大括号内无论写什么名称,最终获取到的都是传入的唯一参数