网站建设whjzyh国家工商网查询官网
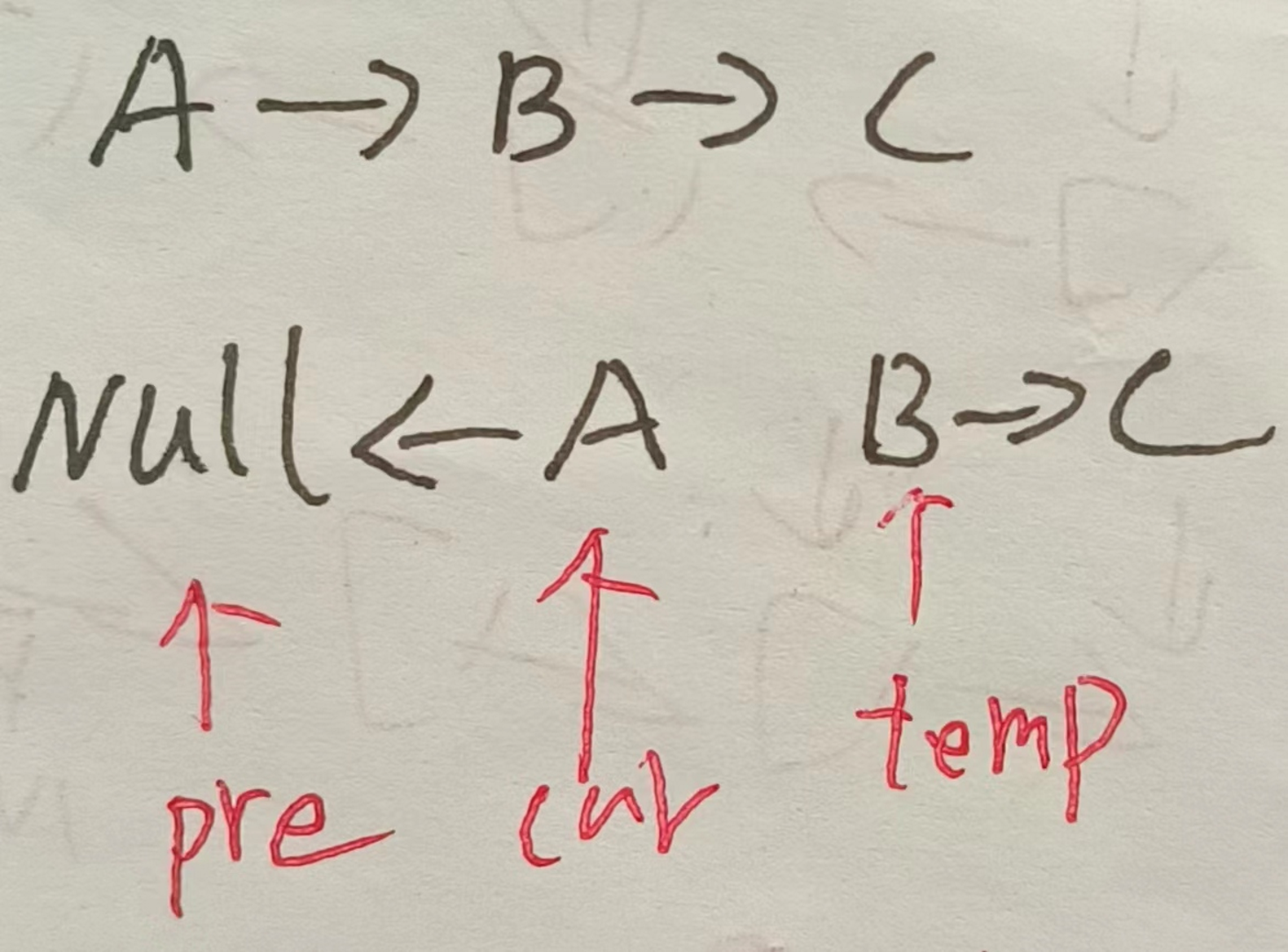
1、链表反转
需要三个指针,一个pre指针指向反转的前一个节点,cur指向要反转的节点,然后设置有一个temp指针指向需要反转的下一个节点,用来使得cur指针移动,因为我们反转之后,无法使用next指针访问到后一个节点
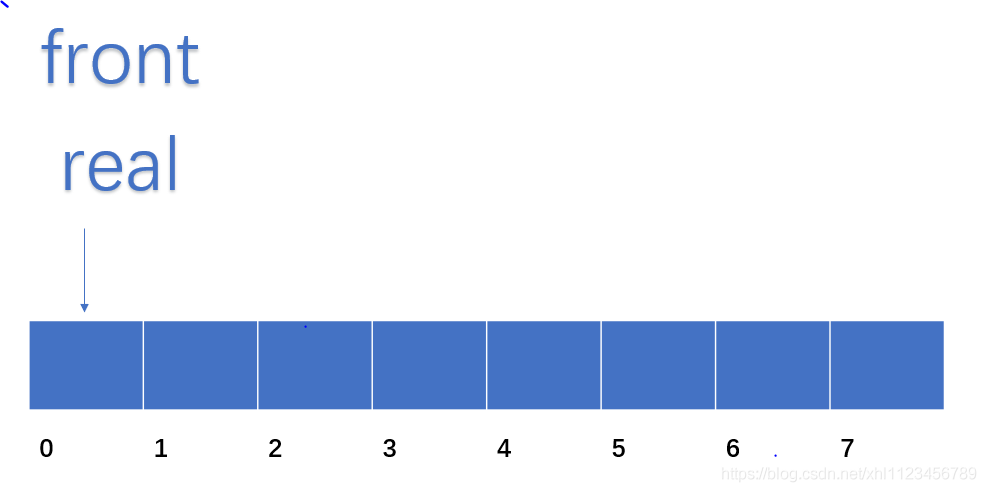
2、数组实现队列
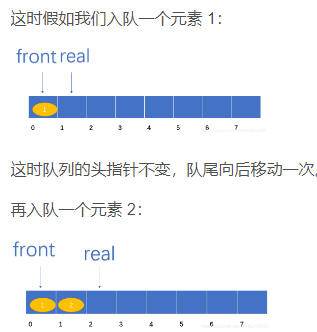
1、入队
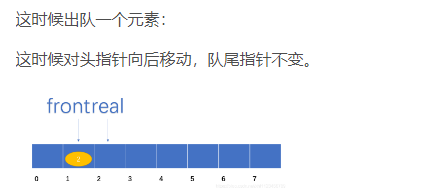
2、出队
1、冒泡排序
比较相邻的元素,如果前一个比后一个大,就把它们两个调换位置。对每一对相邻元素作同样的工作,从开始第一对到结尾的最后一对。这步做完后,最后的元素会是最大的数。针对所有的元素重复以上的步骤,除了最后一个。持续每次对越来越少的元素重复上面的步骤,直到没有任何一对数字需要比较。注意:第二个for循环j < length - i - 1要注意哦
2、快排
1)从序列中挑出一个元素,作为”基准”(pivot).
2)把所有比基准值小的元素放在基准前面,所有比基准值大的元素放在基准的后面(相同的数可以到任一边),这个称为分区(partition)操作。
3)对每个分区递归地进行步骤1~2,递归的结束条件是序列的大小是0或1,这时整体已经被排好序了。