网站开发常用开发语言成都百度公司怎么样
Asp.net web应用程序MVC之View视图
.ASP.NET MVC页面也就是要说的视图基本被放在Views文件夹下;
2.利用APS.NET MVC模板生成框架,Views文件夹下的默认页面为.cshtml页面;
3.ASP.NET MVC默认页面为Razor格式的页面,因此默认页面为.cshtml页面;
4.ASP.NET MVC中,支持WebForm页面,即.aspx页面;
5.ASP.NET MVC中,支持静态html页面;
注意这里使用的是.cshtml页面的视图
ReaderCatgory.cshtml视图页面
该视图是分类的页面视图主要代码是
<script>function ReaderCatgoryadd() {layer.open({type: 2,area: ['700px', '550px'],fixed: false, //不固定title: '读者类型新增',maxmin: true,content: '/Reader/ReaderCatgoryAdd'});}layui.use(['table', 'layer', 'laydate'], function () {var table = layui.table;var layer = layui.layer//弹层;, laydate = layui.laydate;var $ = layui.jquery;table.render({elem: '#test', url: '/Reader/ReaderCatgoryData' //数据接口, method: 'post',title: '用户数据表', cols: [[{ field: 'id', style: 'display:none;' }, { field: 'zizeng', width: 60, title: '编号', fixed: true, templet: '#zizeng' }, { field: 'rname', title: '用户名称', width: 90 },{ field: 'rnum', title: '借书次数', width:120 },{ field: 'rday', title: '借书天数', width: 190 },{ field: 'rxnum', title: '续借次数', width: 90 },{ field: 'idate', title: '注册日期', width: 200, sort: true},, { fixed: 'right', title: '操作', align: 'right', toolbar: '#barDemo', width: 90 }]], page: true,done: function (res, curr, count) {// 隐藏列$(".layui-table-box").find("[data-field='id']").css("display", "none");}});//监听行工具事件table.on('tool(test)', function (obj) {var data = obj.data;//console.log(obj)//if (obj.event === 'detail') {// layer.msg('查看操作');//}if (obj.event === 'del') {layer.confirm('真的删除行么', function (index) {obj.del();layer.close(index);$.ajax({url: "ReaderCatgoryDelete",type: 'post',data: data,dataType: "json",/* beforeSend:function () {this.layerIndex = layer.load(0, { shade: [0.5, '#393D49'] });},*/success: function (data) {if (data == "2") {layer.msg("删除失败", { icon: 5 });//失败的表情return;} else if (data == '1') {layer.msg("删除成功", {icon: 6,//成功的表情time: 1000 //1秒关闭(如果不配置,默认是3秒)}, function () {//location.href = "/jifenq/shiwan";//location.reload();});}},complete: function () {layer.close(this.layerIndex);},});});} else if (obj.event === 'edit') {//window.location.href = "/systemconfig/adminuserEdit/?id=" + data.id + "";layer.open({type: 2,area: ['700px', '550px'],fixed: false, //不固定title: '读者分类修改',maxmin: true,content: '/Reader/ReaderCatgoryEdit/?id=' + data.id});}});$('.demoTable .layui-btn').on('click', function () {var type = $(this).data('type');active[type] ? active[type].call(this) : '';});});
</script>使用的是layui框架渲染数据展示列表,layui默认显示数据格式如下

使用的是其中的方法渲染

简单说一下如何使用,主要调用
table.render({elem: '#test', url: '/Reader/ReaderCatgoryData' //数据接口, method: 'post',title: '用户数据表', cols: [[{ field: 'id', style: 'display:none;' }, { field: 'zizeng', width: 60, title: '编号', fixed: true, templet: '#zizeng' }, { field: 'rname', title: '用户名称', width: 90 },{ field: 'rnum', title: '借书次数', width:120 },{ field: 'rday', title: '借书天数', width: 190 },{ field: 'rxnum', title: '续借次数', width: 90 },{ field: 'idate', title: '注册日期', width: 200, sort: true},, { fixed: 'right', title: '操作', align: 'right', toolbar: '#barDemo', width: 90 }]], page: true,done: function (res, curr, count) {// 隐藏列$(".layui-table-box").find("[data-field='id']").css("display", "none");}});其中url是访问控制器方法后,返回的json格式的数据
然后展示在绑定的elem:"#test"元素
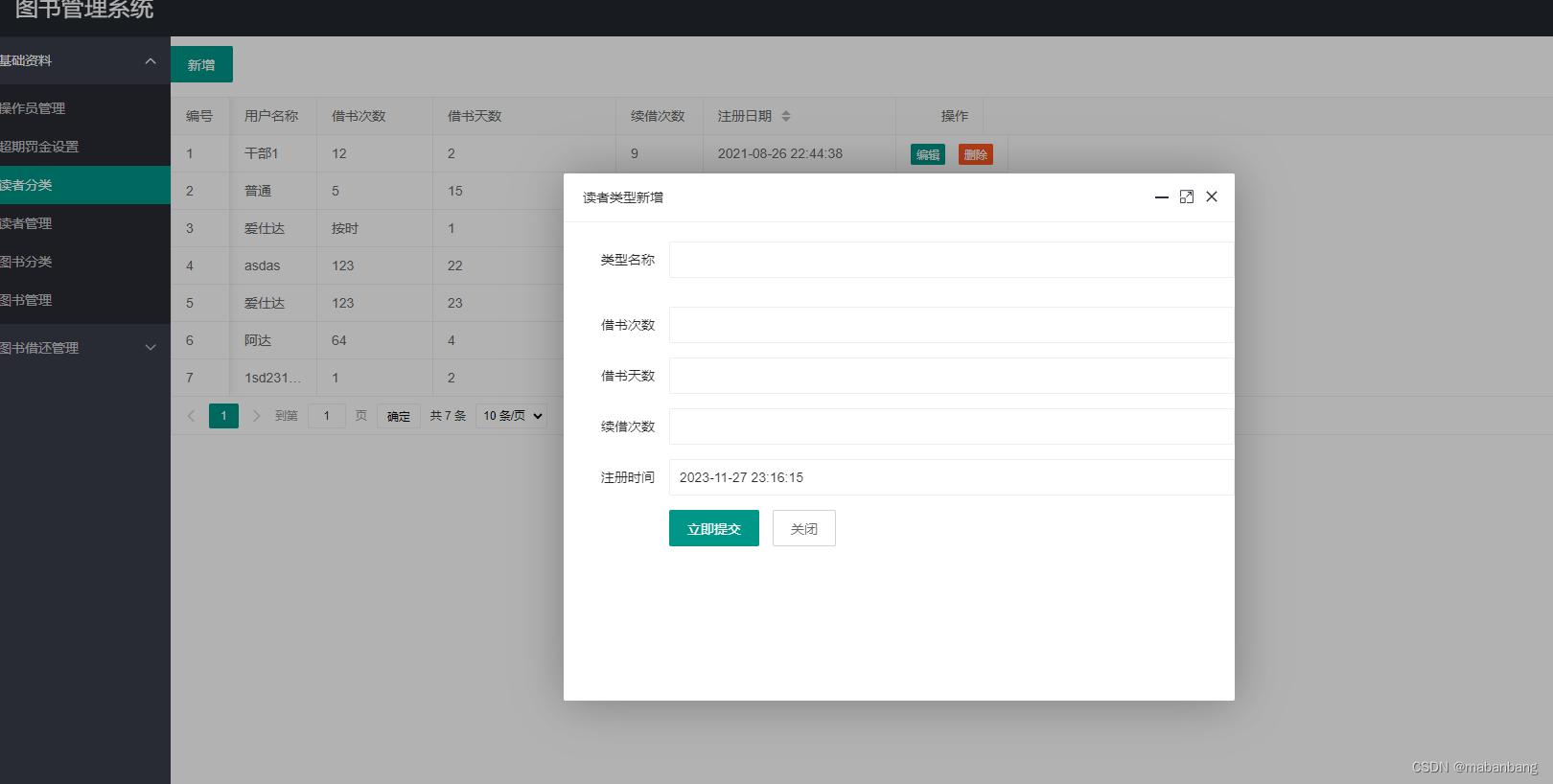
<table class="layui-hide" id="test" lay-filter="test"></table><script type="text/html" id="zizeng">{{d.LAY_TABLE_INDEX+1}}</script><script type="text/html" id="barDemo">@*<a class="layui-btn layui-btn-primary layui-btn-xs" lay-event="detail">查看</a>*@<a class="layui-btn layui-btn-xs" lay-event="edit">编辑</a><a class="layui-btn layui-btn-danger layui-btn-xs" lay-event="del">删除</a></script>ReaderCatgoryAdd.cshtml页面
页面是访问添加的视图,操作增加的页面
<link href="~/content/layui/css/layui.css" rel="stylesheet" />
<script src="~/content/layui/layui.js"></script>
<script src="~/content/layui/jquery.min.js"></script>
<div style="margin-top:20px;"><!-- 内容主体区域 --><form class="layui-form" action=""><div class="layui-form-item"><div class="layui-form-item"><label class="layui-form-label">类型名称</label><div class="layui-input-block"><input type="text" name="rname" lay-verify="required" autocomplete="off" placeholder="" class="layui-input"></div></div></div><div class="layui-form-item"><label class="layui-form-label">借书次数</label><div class="layui-input-block"><input type="text" name="rnum" autocomplete="off" placeholder="" class="layui-input"></div></div><div class="layui-form-item"><label class="layui-form-label">借书天数</label><div class="layui-input-block"><input type="text" name="rday" autocomplete="off" placeholder="" class="layui-input"></div></div><div class="layui-form-item"><label class="layui-form-label">续借次数</label><div class="layui-input-block"><input type="text" name="rxnum" autocomplete="off" placeholder="" class="layui-input"></div></div><div class="layui-form-item"><label class="layui-form-label">注册时间</label><div class="layui-input-block"><input type="text" class="layui-input" id="idate" name="idate"></div></div><div class="layui-form-item"><div class="layui-input-block"><button class="layui-btn" lay-submit="" lay-filter="demo1" id="tijiao">立即提交</button><button class="layui-btn layui-btn-primary" id="closeIframe">关闭</button></div></div></form></div><script>layui.use(['form', 'layedit', 'laydate', 'element'], function () {var form = layui.form, layer = layui.layer, layedit = layui.layedit, laydate = layui.laydate;var element = layui.element;var $ = layui.jquery, form = layui.form;//日期laydate.render({elem: '#idate', type: 'datetime', value: new Date()});laydate.render({elem: '#date1'});//创建一个编辑器var editIndex = layedit.build('LAY_demo_editor');//监听提交form.on('submit(demo1)', function (data) {//layer.msg(JSON.toString(base64img));var userInfo = data.field;var url = "/Reader/ReaderCatgorySave";$.ajax({url: url,type: 'post',data: userInfo,dataType: "json",/* beforeSend:function () {this.layerIndex = layer.load(0, { shade: [0.5, '#393D49'] });},*/success: function (data) {if (data == "2") {layer.msg("增加失败", { icon: 5 });//失败的表情return;} else if (data == '1') {layer.msg("添加成功", {icon: 6,//成功的表情time: 1000 //1秒关闭(如果不配置,默认是3秒)}, function () {var index = parent.layer.getFrameIndex(window.name); //获取窗口索引parent.location.reload();parent.layer.close(index);//location.href = "/systemconfig/index";});}},complete: function () {layer.close(this.layerIndex);},});return false;//阻止表单跳转链接!//layer.msg($('#appimg').val());/* layer.alert(JSON.stringify(data.field), {title: '最终的提交信息'})return false;*/});//表单初始赋值/* form.val('example', {"username": "贤心" // "name": "value","password": "123456","interest": 1,"like[write]": true //复选框选中状态,"close": true //开关状态,"sex": "女","desc": "我爱 layui"})*/});
</script>其中
//监听提交form.on('submit(demo1)', function (data) {//layer.msg(JSON.toString(base64img));var userInfo = data.field;var url = "/Reader/ReaderCatgorySave";form.on监听的是页面提交按钮的事件。调用url = "/Reader/ReaderCatgorySave";前面说到的控制器ReaderController.cs中ReaderCatgorySave保存方法
ReaderCatgoryEdit.cshtml页面
修改页面和前面增加页面原理差不多一样