网站建设意见建议表怎么知道网站是什么开源做的
1. 泛型编程
实现一个通用的交换函数,使用函数重载虽然可以实现,但是有以 下几个不好的地方:
1. 重载的函数仅仅是类型不同,代码复用率比较低,只要有新类型出现时,就需要用户自己增加对应的函
数
2. 代码的可维护性比较低,一个出错可能所有的重载均出错
因此,我们可以给编译器一个模子,让编译器根据不同的类型利用该模子来生成代码呢?
泛型编程:编写与类型无关的通用代码,是代码复用的一种手段。泛型编程代码可以处理不同类型,不同结构的数据
模板是泛型编程的基础,但模板不等于泛型编程。
2. 函数模板
2.1 函数模板概念
函数模板与类型无关,在使用时被参数化,根据实参类型产生函数的特定类型版本。
方法要通用,在实现时类型就不能具体化--类型给具体了方法只能处理该种类型其他处理不了
2.1 函数模板格式
template<typename T1, typename T2,......,typename Tn>返回值类型 函数名(参数列表){}
举例加法模板
#include<iostream>
using namespace std;//方法要通用,在实现时类型就不能具体化--类型给具体了方法只能处理该种类型其他处理不了
//要告诉编译器,T是一个类型
//typedef double T; 这种方式错误,实际上还是double类型//定义一个ADD模板
template<typename T>
T Add(const T& left, const T& right)
{cout << typeid(T).name() << endl;return left + right;
}int main()
{Add(10, 20);Add(10.2, 2.0);return 0;
}
注意:typename是用来定义模板参数关键字,也可以使用class(但是一般不用,class定义类,不要引起歧义)
(不能使用struct代替class) 这也是二者区别之一
2.3 函数模板的原理
函数模板不是一个函数,是一个规则
在实例化之前:只是对模板进行简单的语法检测
在实例化之后:根据用户对函数模板的实例化结果来生成处理对应类型的代码,并对这些代码进行再次编译
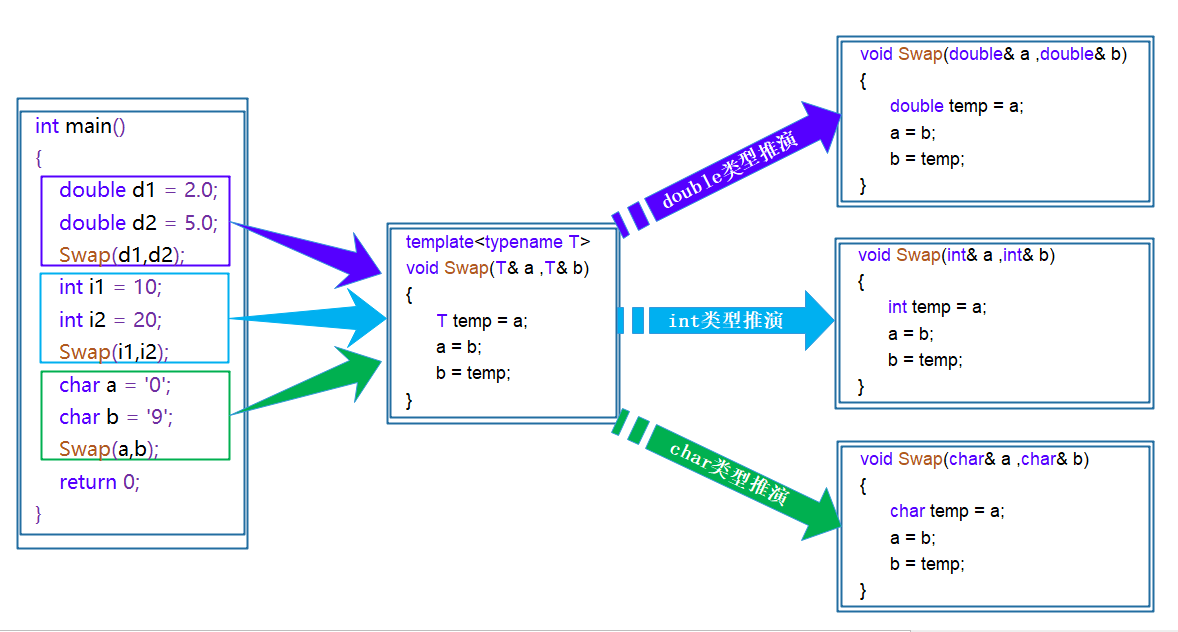
在编译器编译阶段,对于模板函数的使用,编译器需要根据传入的实参类型来推演生成对应类型的函数以供调用。比如:当用double类型使用函数模板时,编译器通过对实参类型的推演,将T确定为double类型,然后产生一份专门处理double类型的代码,对于字符类型也是如此
ADD(1,2) //都为Int,认为T为int类型,则会根据模板生成处理int类型的ADD<int>函数
ADD(2.1,4.2) //都为double,认为T为double类型,则会根据模板生成处理double类型的ADD<double>函数
ADD('1','2') //都为char,认为T为char类型,则会根据模板生成处理int类型的ADD<char>函数ADD(1,2.2) //T到底设置为int,还是double类型,编译器无法确定,解决方法如下1.强转
ADD(1,(int)2.2)2.增加模板
template<typename T, typename S>对模板进行显式实例化,明确指明模板参数列表中T的实际类型
ADD<double>(1,2.2);2.4 函数模板的实例化
显式实例化:在函数名后的<>中指定模板参数的实际类型
显式实例化:明确指定了参数类表中T的实际类型,不需要推演T的类型,如上代码举例
如果类型不匹配,编译器会尝试进行隐式类型转换,如果无法转换成功编译器将会报错
隐式实例化:没有明确指出参数类表中T的实际类型,编译器需要推演用户传递的类型来确定模板参数列表T的类型,如2.1中代码例子
3. 类模板
3.1 类模板的定义格式
template<class T1, class T2, ..., class Tn>
class 类模板名
{// 类内成员定义
};
// 动态顺序表
// 注意:Vector不是具体的类,是编译器根据被实例化的类型生成具体类的模具
template<class T>
class Vector
{
public :Vector(size_t capacity = 10): _pData(new T[capacity]), _size(0), _capacity(capacity){}// 使用析构函数演示:在类中声明,在类外定义。~Vector();void PushBack(const T& data);void PopBack();// ...size_t Size() {return _size;}T& operator[](size_t pos)
{assert(pos < _size);return _pData[pos];}private:T* _pData;size_t _size;size_t _capacity;
};
// 注意:类模板中函数放在类外进行定义时,需要加模板参数列表
template <class T>
Vector<T>::~Vector()
{if(_pData)delete[] _pData;_size = _capacity = 0;
}3.2 类模板的实例化
类模板实例化与函数模板实例化不同,类模板实例化需要在类模板名字后跟<>,然后将实例化的类型放在<>
中即可,类模板名字不是真正的类,而实例化的结果才是真正的类
// Vector类名,Vector<int>才是类型
Vector<int> s1;
Vector<double> s2;