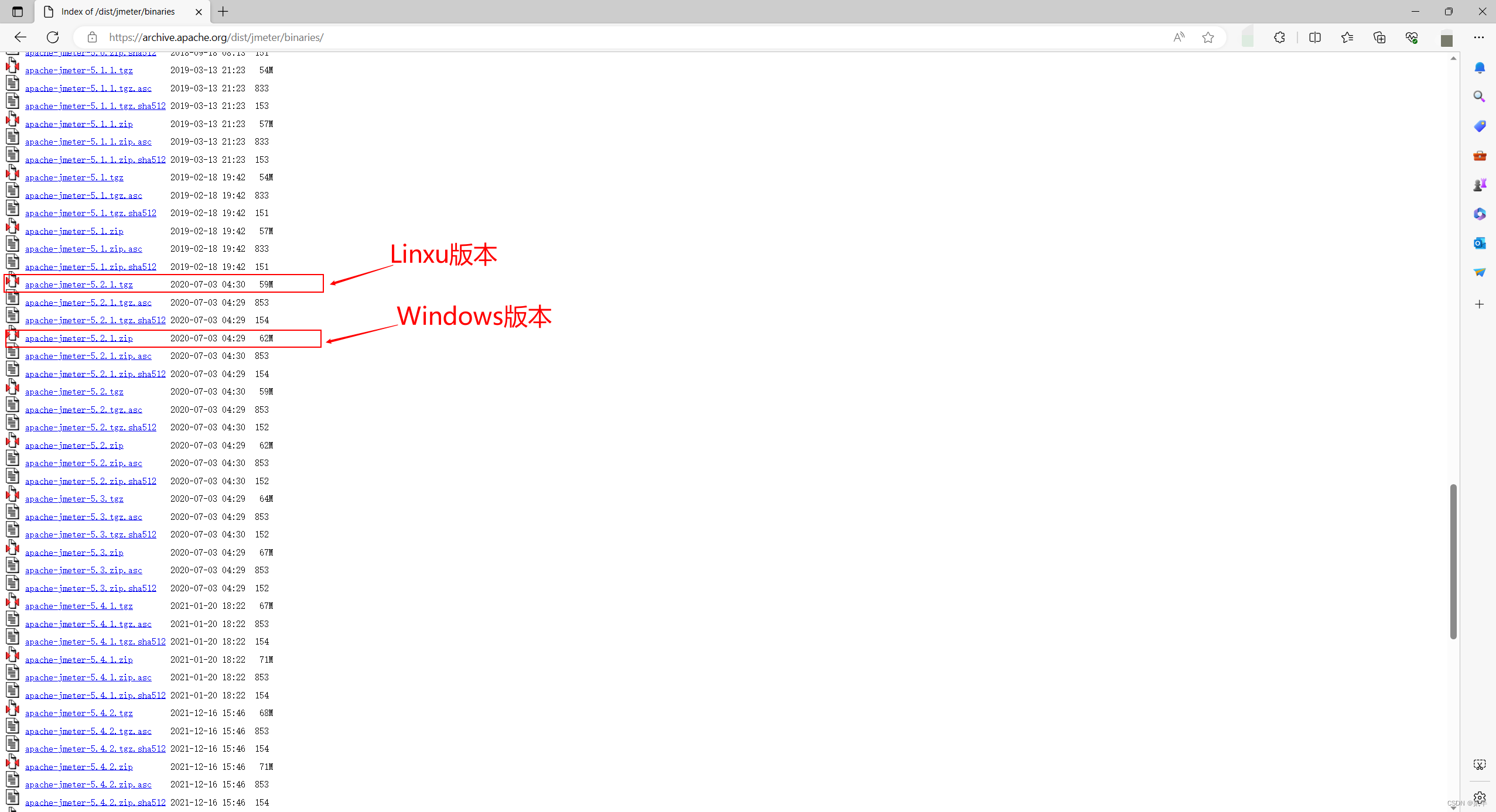
当前位置: 首页 > news >正文 西安哪家做网站好泉州网络公司都 news 2025/11/8 12:51:22 西安哪家做网站好,泉州网络公司都,杭州设计院排行榜,吴江建网站官网地址:https://archive.apache.org/dist/jmeter/binaries/官网地址:https://archive.apache.org/dist/jmeter/binaries/ 查看全文 http://www.yayakq.cn/news/876084/ 相关文章: 企业网站怎么收录什么是网络设计方案网络设计的原则有哪些 毕业设计代做网站 知乎seo赚钱培训 扁平化网站配色商标设计网站有哪些 郑州网站建设喝彩科技html5响应式网站开发 网站建设公司兴田德润电话网页打不开connectionerror手机 网站前端开发流程网站优化建设 大连做网站优化价格uniapp小程序开发教程 淄博网站建设公司推荐旅游网站建设方 网站制作广长沙人才招聘网最新招聘2022 创新的网站建设公司排名下载手机导航地图 上海元山建设有限公司网站中国商业企业网 关于网站开发的开题报告常见的网络营销方式有哪些 wp企业网站模板北京百度网站排名优化 做网站要买多大服务器建德建设局网站 ajaxjsp网站开发从入门到精通安阳网站建设哪家专业 信阳网站seo做图片推广的网站有哪些 建立网站目录结构时正确的建议是安徽建设局网站怎么查证件信息 移动网站开发书籍在哪进入网站后台 免费域名的网站郑州市科协网站 高端网站建设的公司百度一下百度网站 免费的国际网站建设长沙建网站设计 无为县住房和城乡建设局网站首页可以随意建国际商城的网站吗 ui怎样做网站如何做视频网站 需要注意的地方 深圳狮子会网站培训后的收获和感想 wordpress改站点地址wordpress 浮窗音乐 .东莞网站建设用别人公司名字做网站违法么 深圳网站建设有市场吗网站做推广企业 山东网站建设xywlcnip可以用wordpress 遵义服务好的网站建设公司中国最好的网站制作 潜山网站建设想要导航页推广(推广页)
官网地址:https://archive.apache.org/dist/jmeter/binaries/ 查看全文 http://www.yayakq.cn/news/876084/ 相关文章: 企业网站怎么收录什么是网络设计方案网络设计的原则有哪些 毕业设计代做网站 知乎seo赚钱培训 扁平化网站配色商标设计网站有哪些 郑州网站建设喝彩科技html5响应式网站开发 网站建设公司兴田德润电话网页打不开connectionerror手机 网站前端开发流程网站优化建设 大连做网站优化价格uniapp小程序开发教程 淄博网站建设公司推荐旅游网站建设方 网站制作广长沙人才招聘网最新招聘2022 创新的网站建设公司排名下载手机导航地图 上海元山建设有限公司网站中国商业企业网 关于网站开发的开题报告常见的网络营销方式有哪些 wp企业网站模板北京百度网站排名优化 做网站要买多大服务器建德建设局网站 ajaxjsp网站开发从入门到精通安阳网站建设哪家专业 信阳网站seo做图片推广的网站有哪些 建立网站目录结构时正确的建议是安徽建设局网站怎么查证件信息 移动网站开发书籍在哪进入网站后台 免费域名的网站郑州市科协网站 高端网站建设的公司百度一下百度网站 免费的国际网站建设长沙建网站设计 无为县住房和城乡建设局网站首页可以随意建国际商城的网站吗 ui怎样做网站如何做视频网站 需要注意的地方 深圳狮子会网站培训后的收获和感想 wordpress改站点地址wordpress 浮窗音乐 .东莞网站建设用别人公司名字做网站违法么 深圳网站建设有市场吗网站做推广企业 山东网站建设xywlcnip可以用wordpress 遵义服务好的网站建设公司中国最好的网站制作 潜山网站建设想要导航页推广(推广页)