重庆工业建设网站北京展览设计制作工厂
交通管理在线服务系统目录
目录
基于Springboot的交通管理系统设计与实现
一、前言
二、系统功能设计
三、系统实现
1、用户信息管理
2、驾驶证业务管理
3、机动车业务管理
4、机动车业务类型管理
四、数据库设计
1、实体ER图
五、核心代码
六、论文参考
七、最新计算机毕设选题推荐
八、源码获取:
博主介绍:✌️大厂码农|毕设布道师,阿里云开发社区乘风者计划专家博主,CSDN平台Java领域优质创作者,专注于大学生项目实战开发、讲解和毕业答疑辅导。✌️
主要项目:小程序、SpringBoot、SSM、Vue、Html、Jsp、Nodejs等设计与开发。
🍅文末获取源码联系🍅
基于Springboot的交通管理系统设计与实现
一、前言
交通管理在线服务系统的有效运用可以帮助管理人员准确快速地处理信息。交通管理在线服务系统在对开发工具的选择上也很慎重,为了便于开发实现,选择的开发工具为idea,选择的数据库工具为Mysql。以此搭建开发环境实现交通管理在线服务系统的功能。其中管理员管理用户,新闻公告。
交通管理在线服务系统是一款运用软件开发技术设计实现的应用系统,在信息处理上可以达到快速的目的,不管是针对数据添加,数据维护和统计,以及数据查询等处理要求,交通管理在线服务系统都可以轻松应对。
关键词:交通管理在线服务系统;SpringBoot框架,系统分析,数据库设计
二、系统功能设计
为了让系统的编码可以顺利进行,特意对本系统功能进行细分设计,设计的系统功能结构见下图。

三、系统实现
1、用户信息管理
如图5.1显示的就是用户信息管理页面,此页面提供给管理员的功能有:用户信息的查询管理,可以删除用户信息、修改用户信息、新增用户信息,还进行了对用户名称的模糊查询的条件

图5.1 用户信息管理页面
2、驾驶证业务管理
如图5.2显示的就是驾驶证业务管理页面,此页面提供给管理员的功能有:查看已发布的驾驶证业务数据,修改驾驶证业务,驾驶证业务作废,即可删除,还进行了对驾驶证业务名称的模糊查询 驾驶证业务信息的类型查询等等一些条件。
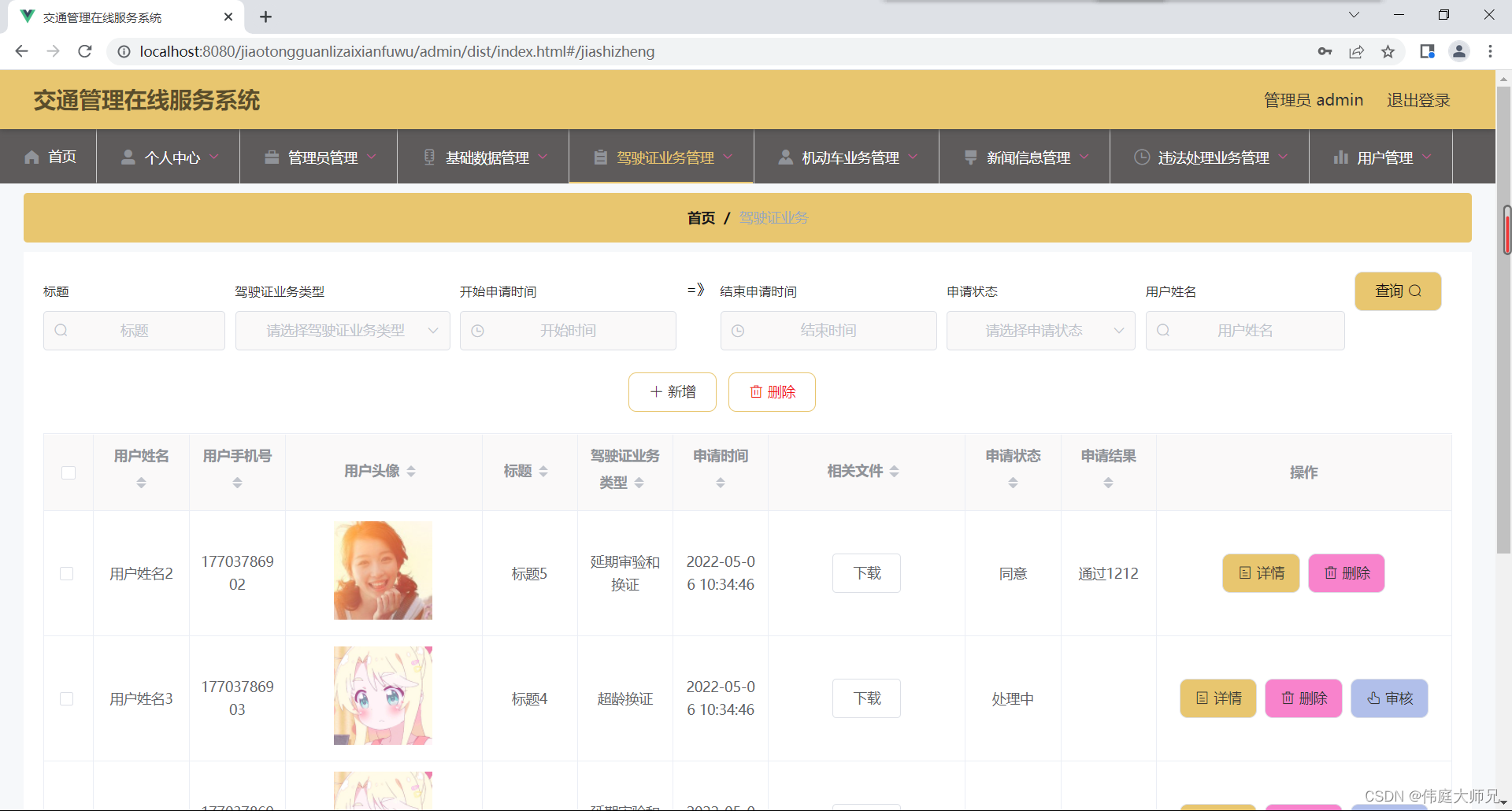
图5.2 驾驶证业务管理页面
3、机动车业务管理
如图5.3显示的就是机动车业务管理页面,此页面提供给管理员的功能有:根据机动车业务进行条件查询,还可以对机动车业务进行新增、修改、查询操作等等。

图5.3 机动车业务管理页面
4、机动车业务类型管理
如图5.4显示的就是机动车业务类型管理页面,此页面提供给管理员的功能有:根据机动车业务类型进行新增、修改、查询操作等等。
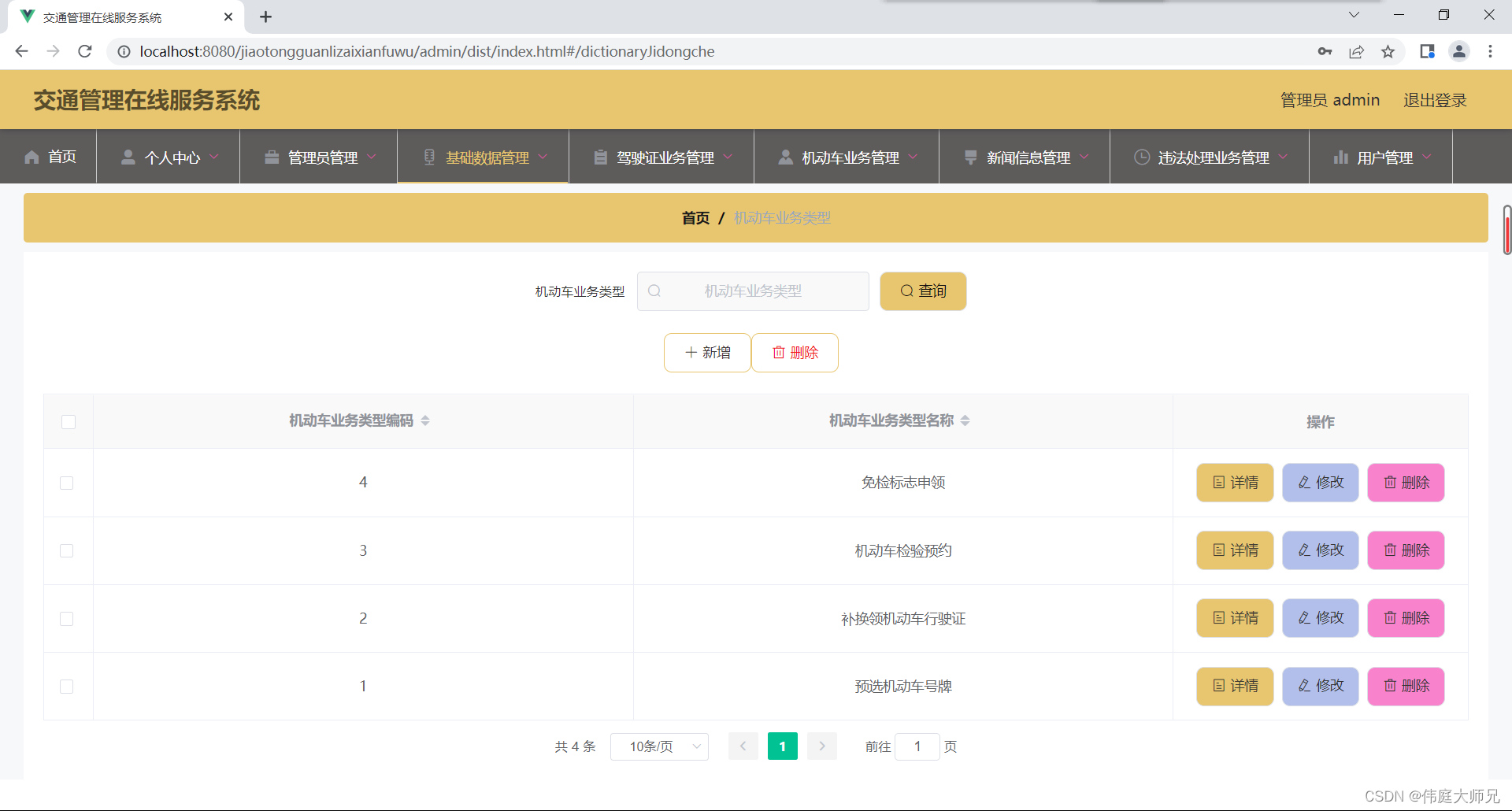
图5.4 机动车业务类型管理页面
四、数据库设计
1、实体ER图
交通管理系统的E-R图如下图所示:
(1)下图是驾驶证业务实体和其具备的属性。
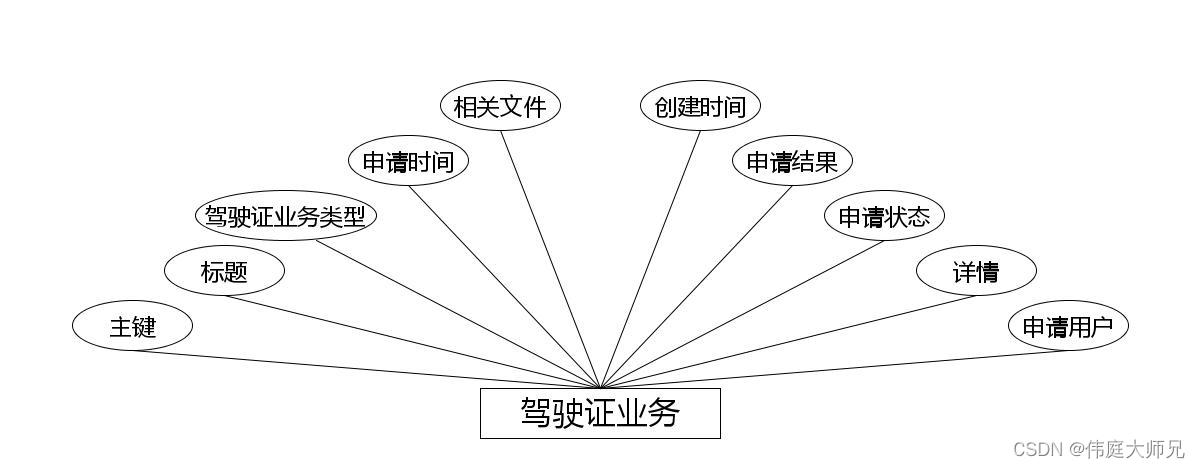
图4.1 驾驶证业务实体属性图
(2)下图是用户实体和其具备的属性。
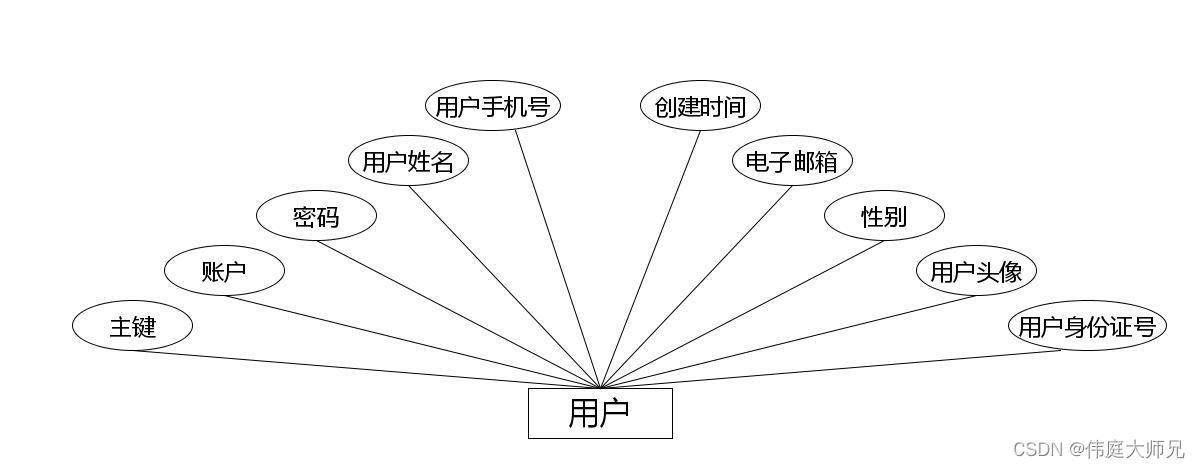
图4.2 用户实体属性图
(3)下图是机动车业务实体和其具备的属性。

图4.3 机动车业务实体属性图
(4)下图是违法处理业务实体和其具备的属性。
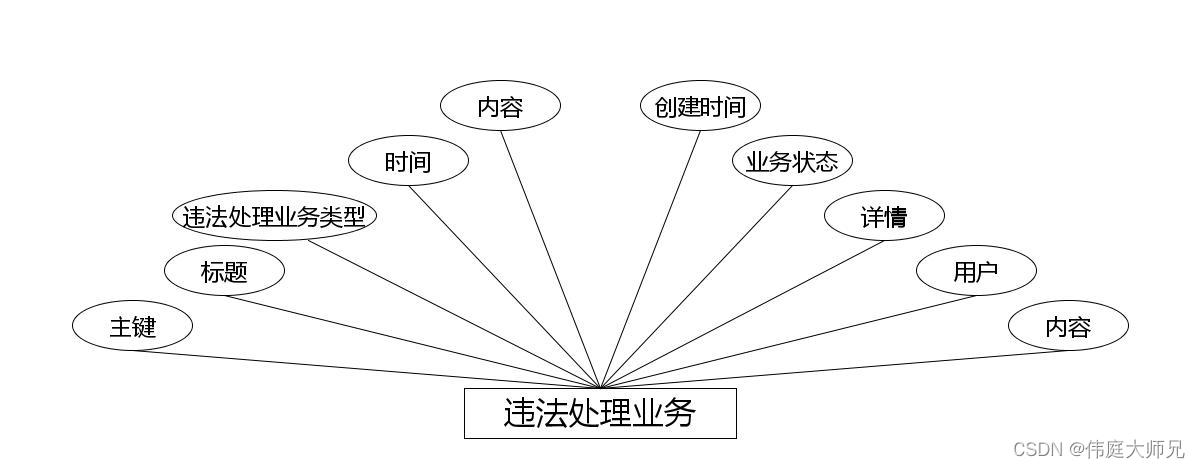
图4.4 违法处理业务实体属性图
(5)下图是用户表实体和其具备的属性。
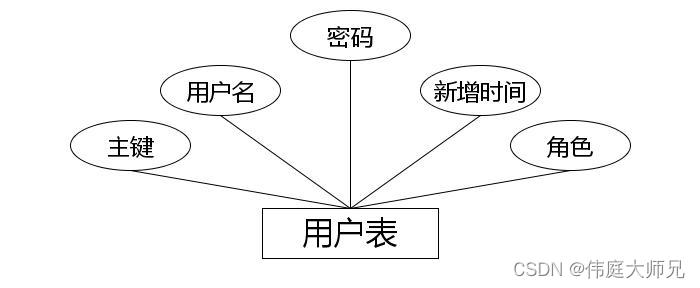
图4.5 用户表实体属性图
(6)下图是新闻信息实体和其具备的属性。

图4.6 新闻信息实体属性图
五、核心代码
package com.service.impl;import com.utils.StringUtil;
import org.springframework.stereotype.Service;
import java.lang.reflect.Field;
import java.util.*;
import com.baomidou.mybatisplus.plugins.Page;
import com.baomidou.mybatisplus.service.impl.ServiceImpl;
import org.springframework.transaction.annotation.Transactional;
import com.utils.PageUtils;
import com.utils.Query;
import org.springframework.web.context.ContextLoader;
import javax.servlet.ServletContext;
import javax.servlet.http.HttpServletRequest;
import com.dao.JidongcheDao;
import com.entity.JidongcheEntity;
import com.service.JidongcheService;
import com.entity.view.JidongcheView;/*** 机动车业务 服务实现类*/
@Service("jidongcheService")
@Transactional
public class JidongcheServiceImpl extends ServiceImpl<JidongcheDao, JidongcheEntity> implements JidongcheService {@Overridepublic PageUtils queryPage(Map<String,Object> params) {if(params != null && (params.get("limit") == null || params.get("page") == null)){params.put("page","1");params.put("limit","10");}Page<JidongcheView> page =new Query<JidongcheView>(params).getPage();page.setRecords(baseMapper.selectListView(page,params));return new PageUtils(page);}}package com.service.impl;import com.utils.StringUtil;
import org.springframework.stereotype.Service;
import java.lang.reflect.Field;
import java.util.*;
import com.baomidou.mybatisplus.plugins.Page;
import com.baomidou.mybatisplus.service.impl.ServiceImpl;
import org.springframework.transaction.annotation.Transactional;
import com.utils.PageUtils;
import com.utils.Query;
import org.springframework.web.context.ContextLoader;
import javax.servlet.ServletContext;
import javax.servlet.http.HttpServletRequest;
import com.dao.JiashizhengDao;
import com.entity.JiashizhengEntity;
import com.service.JiashizhengService;
import com.entity.view.JiashizhengView;/*** 驾驶证业务 服务实现类*/
@Service("jiashizhengService")
@Transactional
public class JiashizhengServiceImpl extends ServiceImpl<JiashizhengDao, JiashizhengEntity> implements JiashizhengService {@Overridepublic PageUtils queryPage(Map<String,Object> params) {if(params != null && (params.get("limit") == null || params.get("page") == null)){params.put("page","1");params.put("limit","10");}Page<JiashizhengView> page =new Query<JiashizhengView>(params).getPage();page.setRecords(baseMapper.selectListView(page,params));return new PageUtils(page);}}
六、论文参考
七、最新计算机毕设选题推荐
最新计算机软件毕业设计选题大全-CSDN博客
八、源码获取:
大家点赞、收藏、关注、评论啦 、👇🏻获取联系方式在文章末尾👇🏻