如何做公司自己的网站首页北京的软件公司
引入:
是这样一种情况,在接口获取数据之后,是一个数组列表,循环展示后,需要在每条数据中都要有图片上传,互不干扰。
分析:
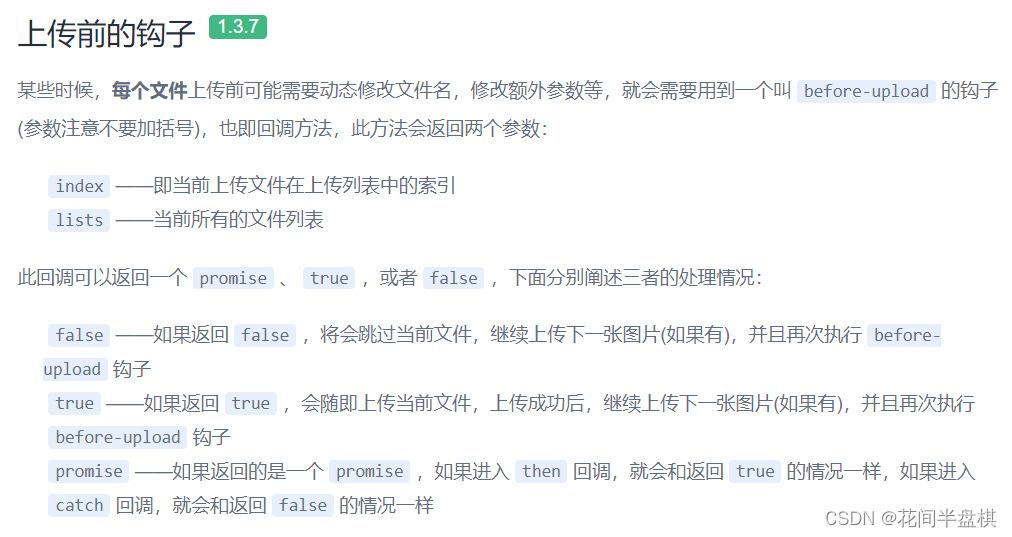
uview 官网中有说明,before-upload 是不加括号的,但是此时需要传参,也就是 for 循环中的每一个 item 信息,这样才能确定是给那一项上传图片的。
解决:
<u-upload :file-list="subItem1.picList" :action="baseUrl":before-upload="(index, list) => beforeAvatarUpload(subItem1, index, list)" max-count="9"></u-upload>
这样就可以进行传参了,默认的两个参数是index和list,subItem1 是 for 循环中的每一项,before-upload 回调 beforeAvatarUpload 的打印结果如下: