个人网站谢谢推广员网站怎么做
1.系统概述
1.1.需求描述
1.2.需求分析
1.3.重难点分析
1.4.重难点解决措施
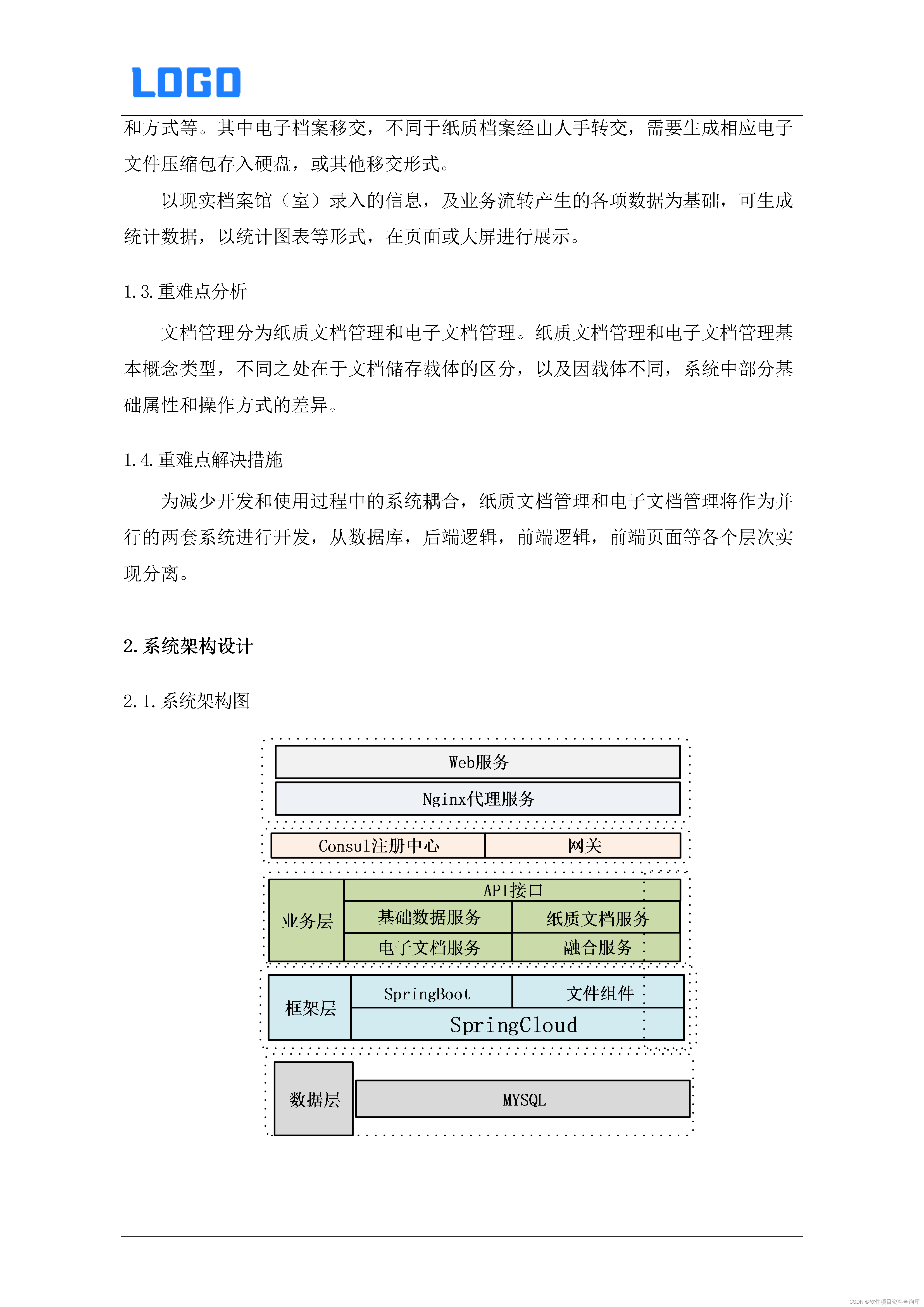
2.系统架构设计
2.1.系统架构图
2.2.关键技术
数据备份技术
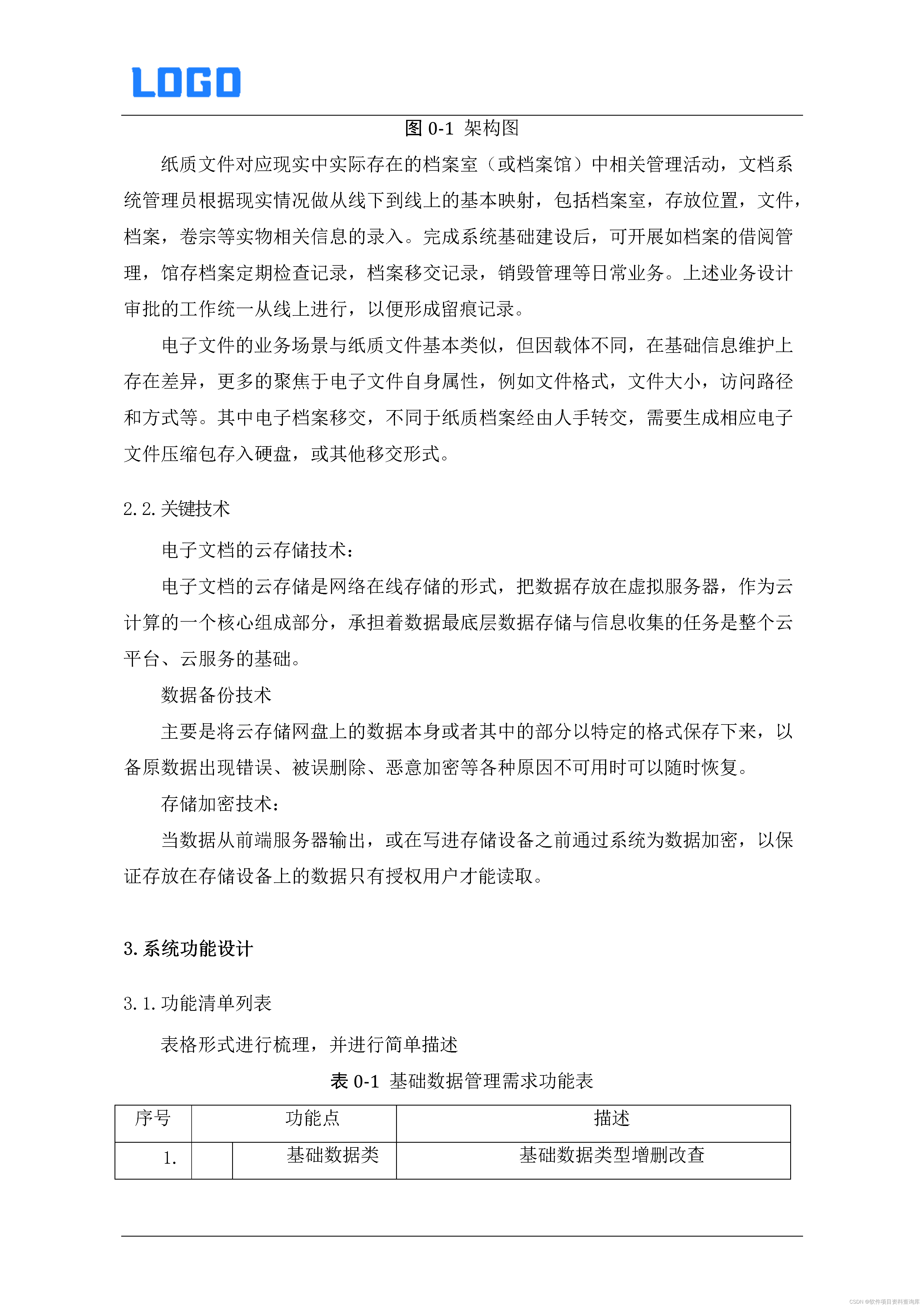
3.系统功能设计
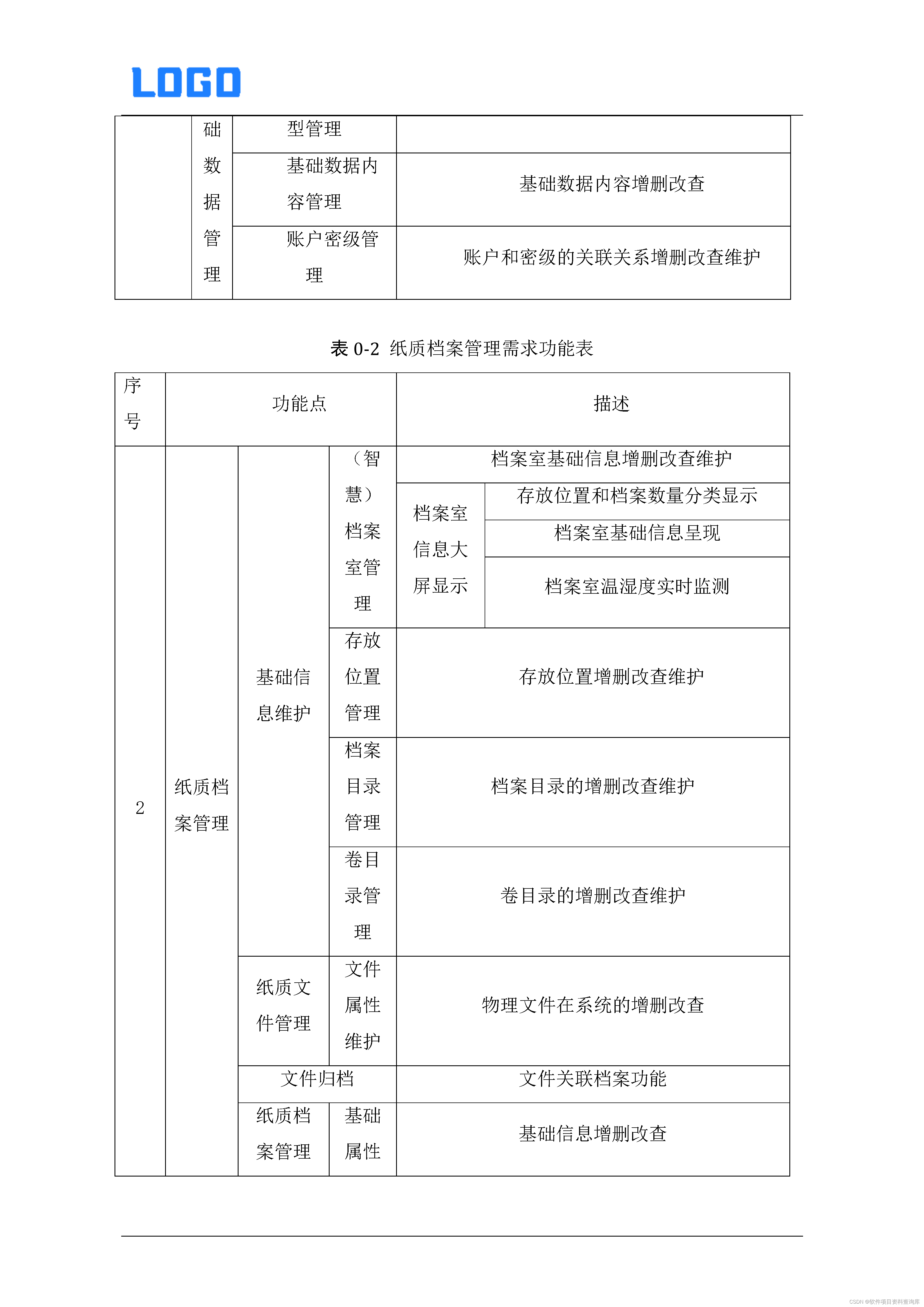
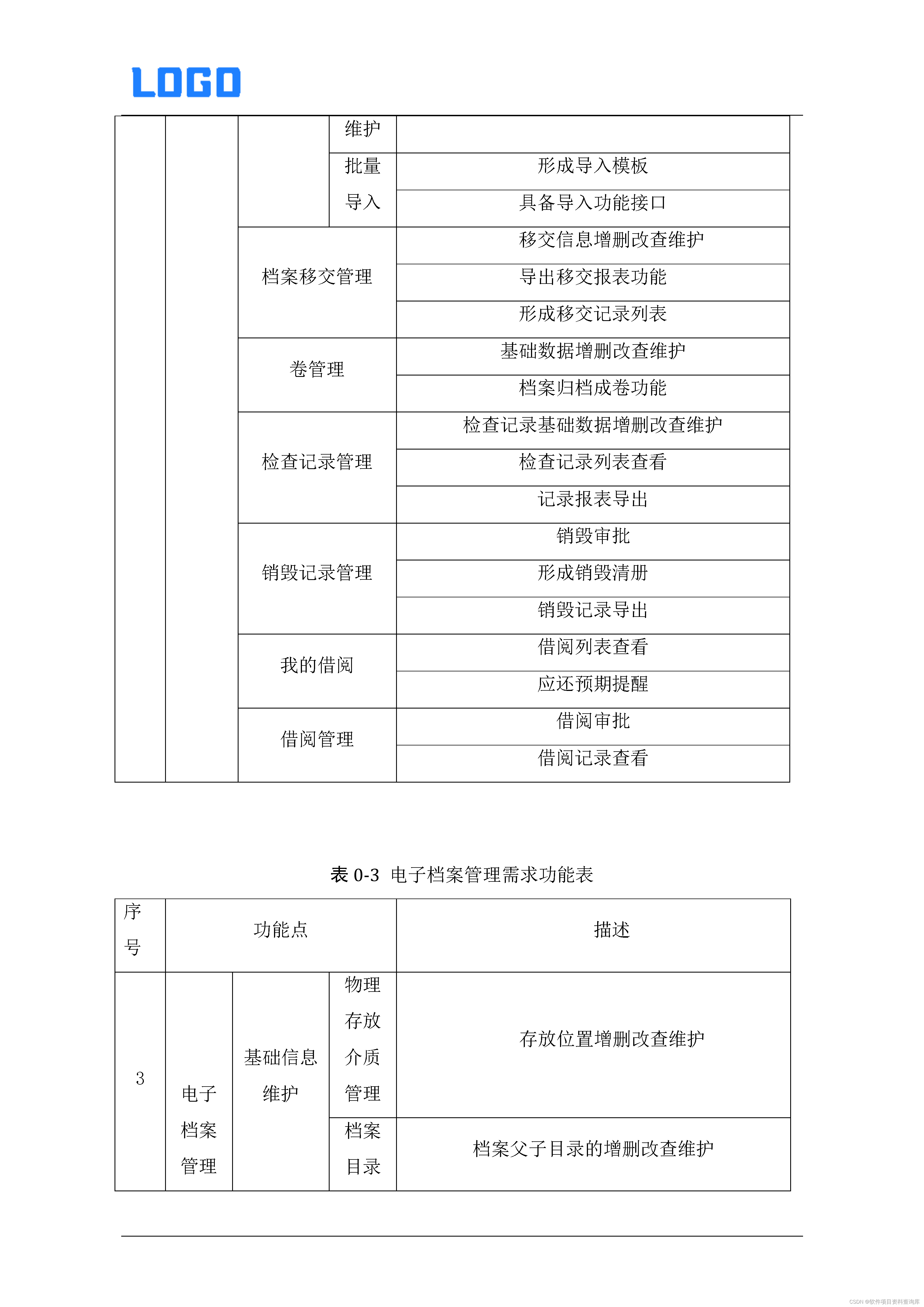
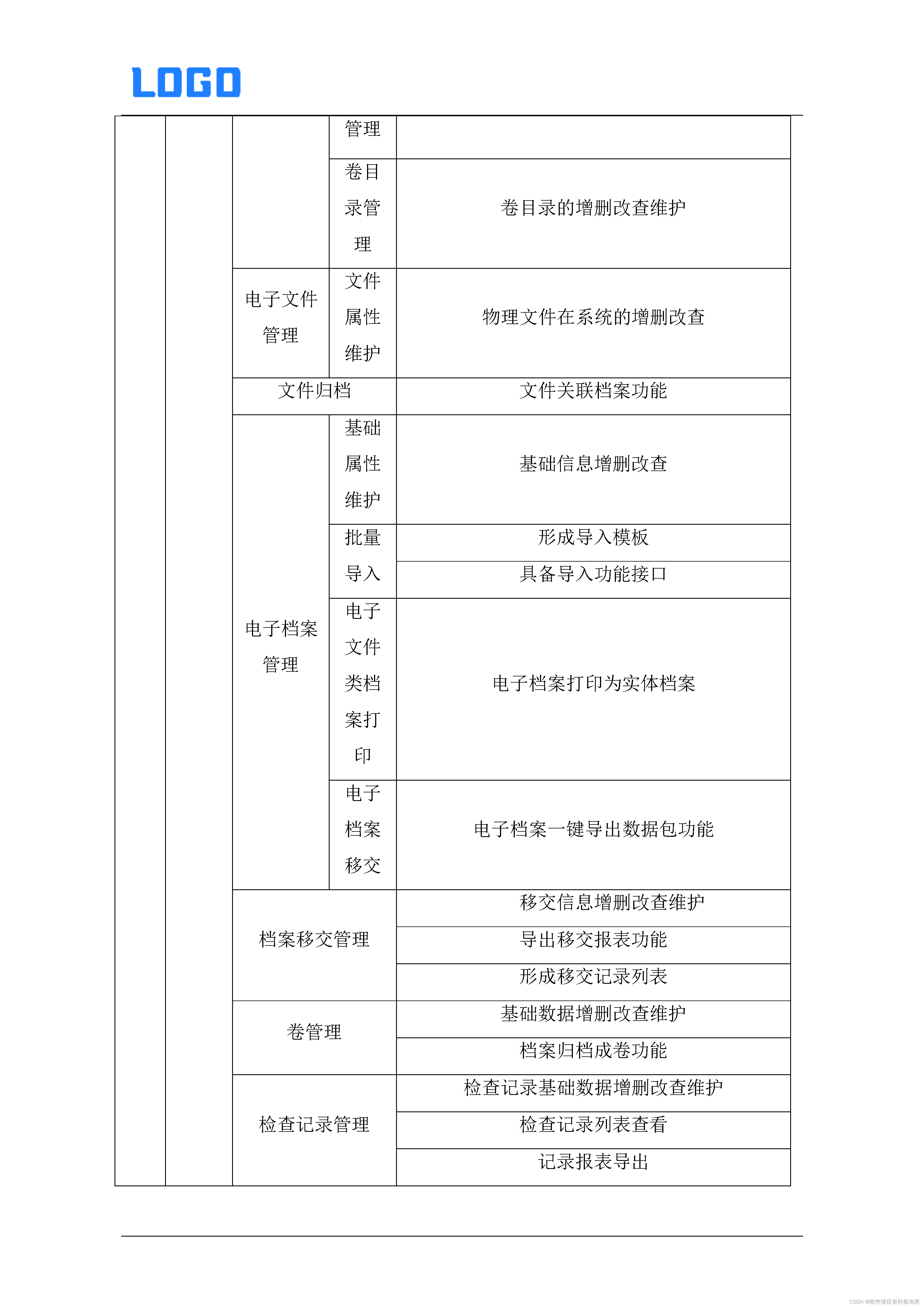
3.1.功能清单列表
3.2.基础数据管理
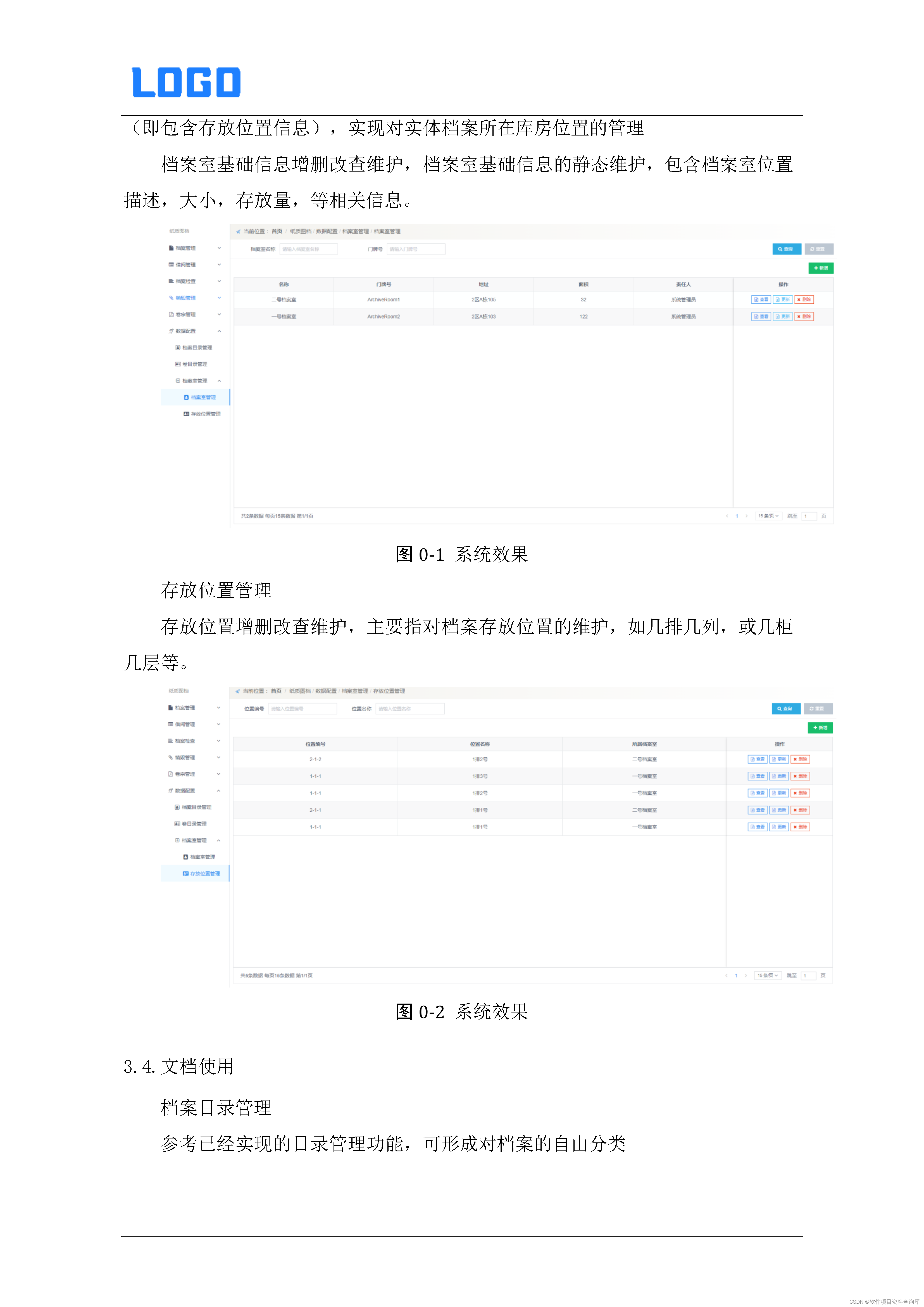
3.3.位置管理
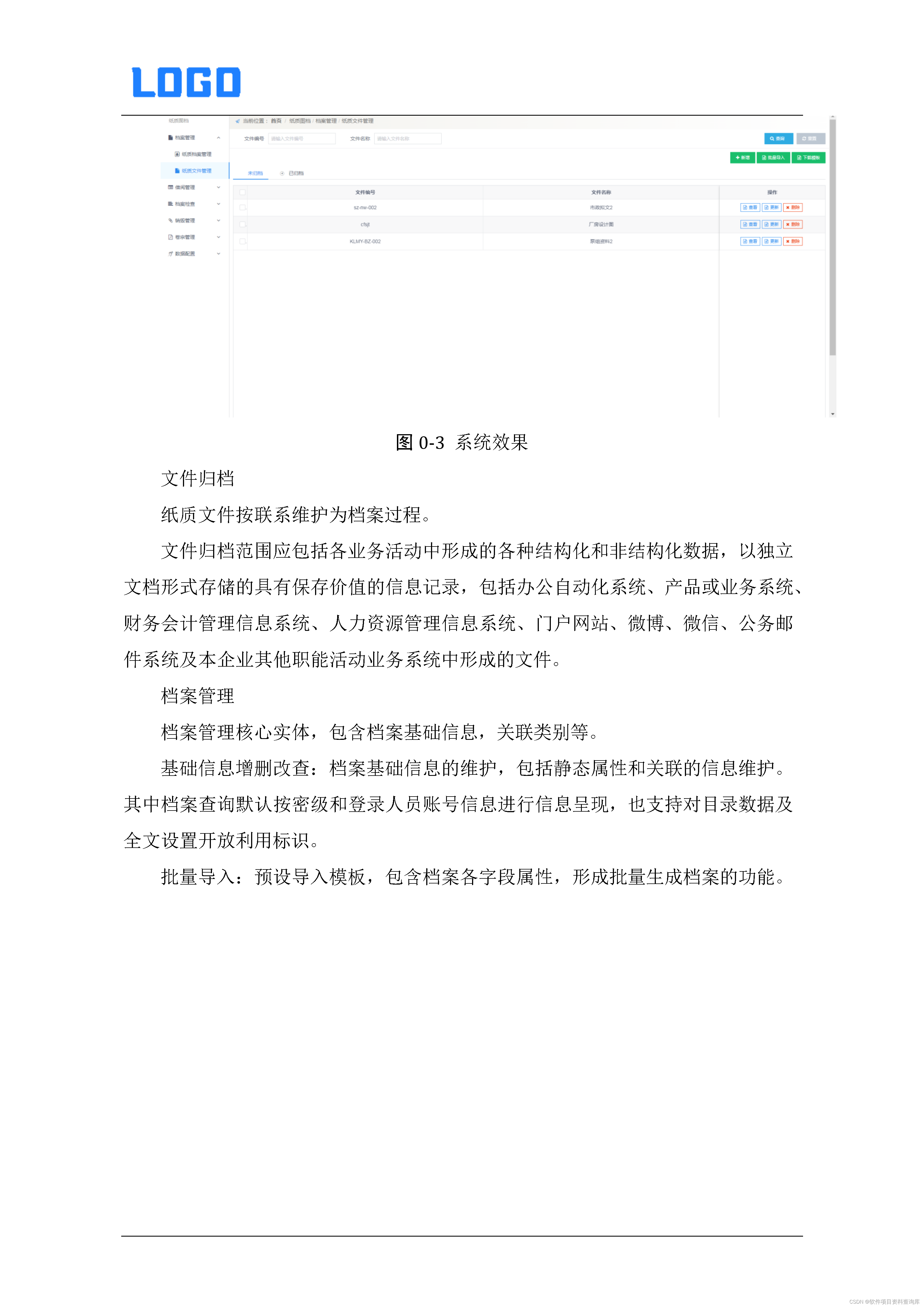
3.4.文档使用
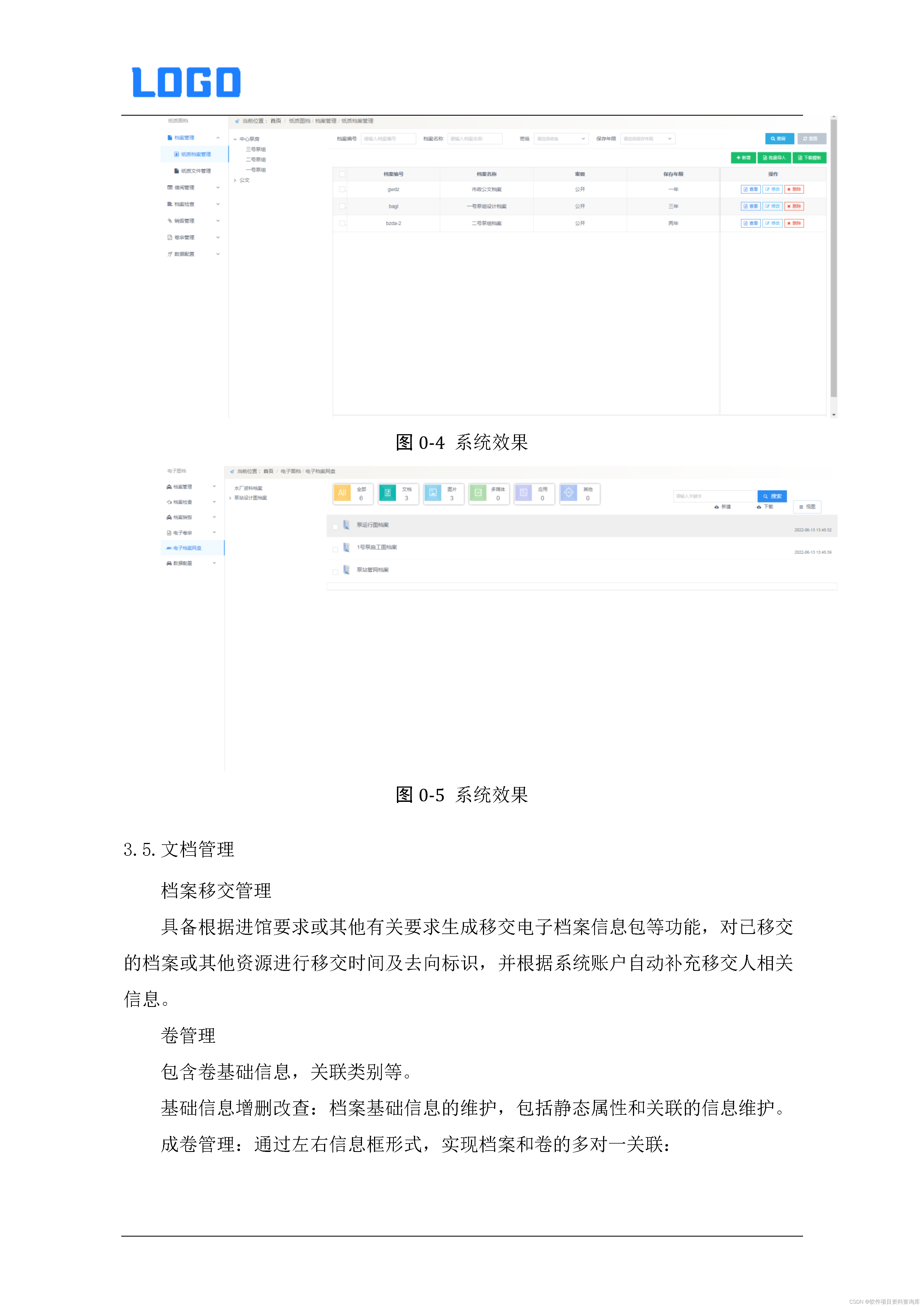
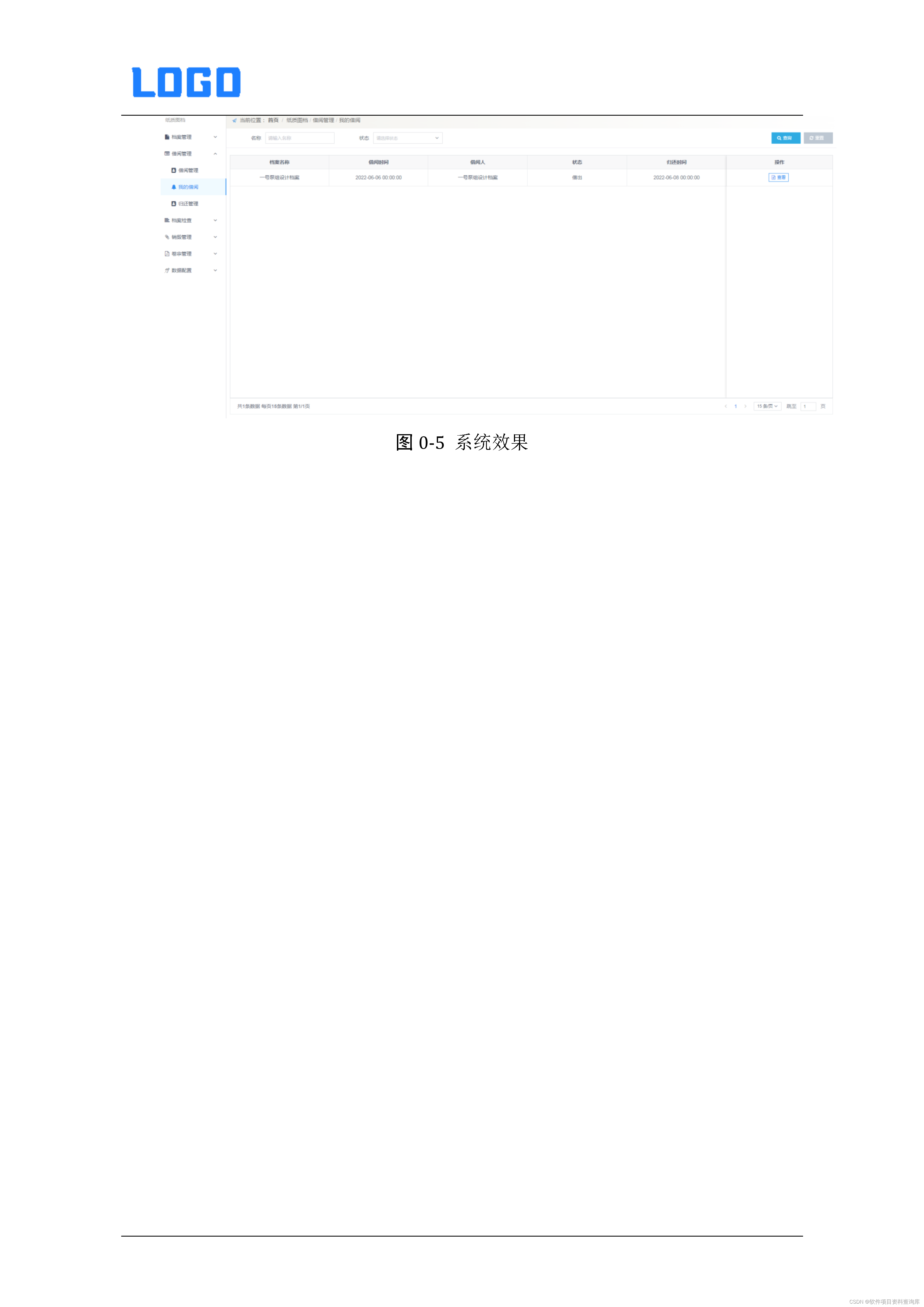
3.5.文档管理
软件全套资料包获取方式①:软件项目开发全套文档下载_软件开发文档下载-CSDN博客
获取方式②:本文末个人名片直接获取。







1.系统概述
1.1.需求描述
1.2.需求分析
1.3.重难点分析
1.4.重难点解决措施
2.系统架构设计
2.1.系统架构图
2.2.关键技术
数据备份技术
3.系统功能设计
3.1.功能清单列表
3.2.基础数据管理
3.3.位置管理
3.4.文档使用
3.5.文档管理
软件全套资料包获取方式①:软件项目开发全套文档下载_软件开发文档下载-CSDN博客
获取方式②:本文末个人名片直接获取。