大连做网站杭州拱墅网站建设
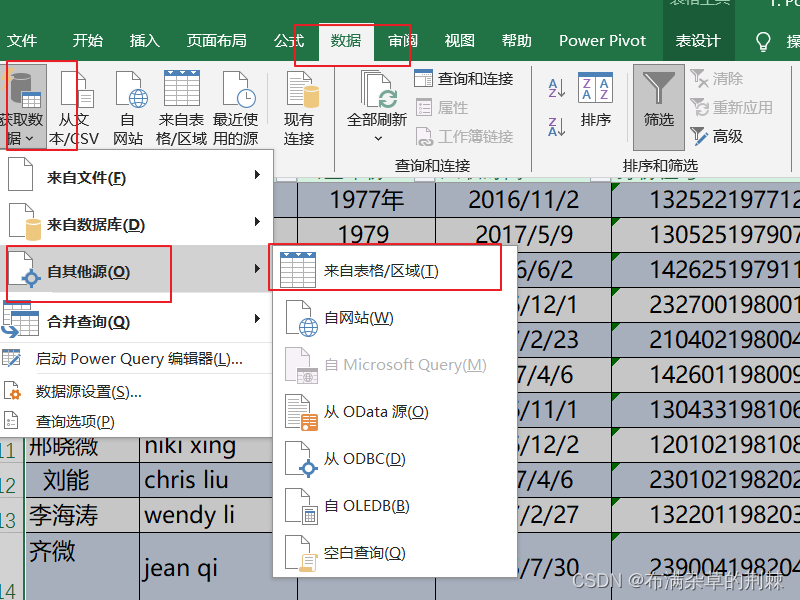
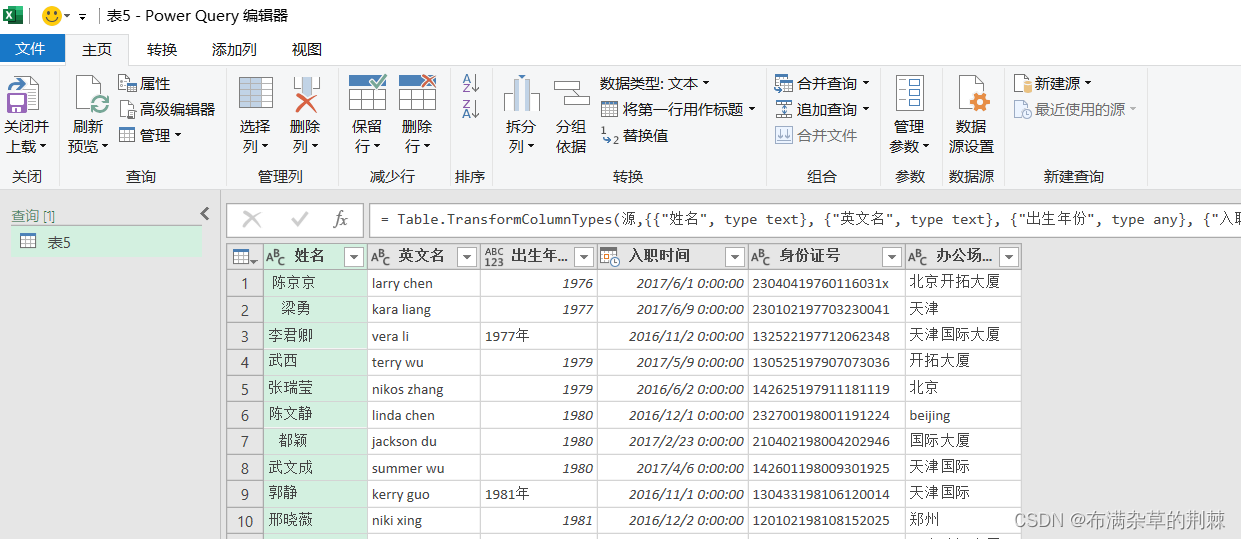
1.导入数据
ctrl+a全选--数据--获取数据--其他来源--来自表格/区域
导入数据,进入编辑模式
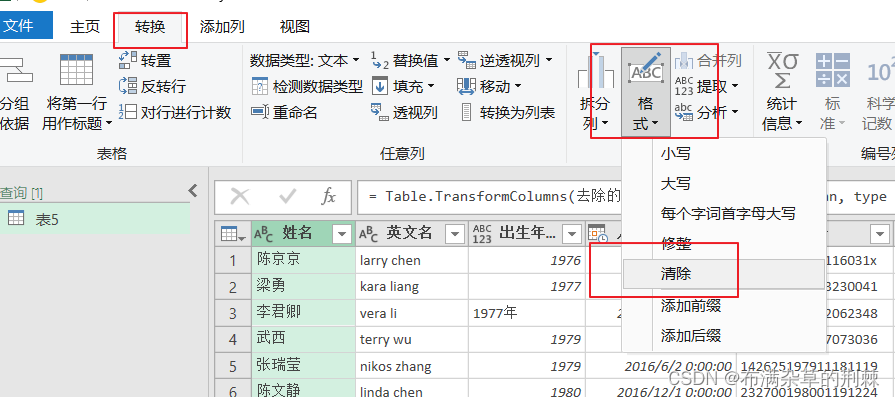
2.整理与清除
清除:删除所选列的非打印字符
转换--格式--清除
修整:删除前面和后面的空格
转换---格式---修整(修整后前面后面的空格没有了)

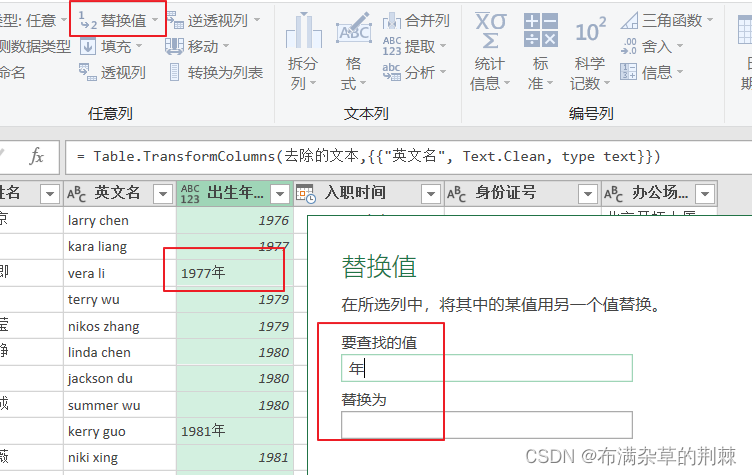
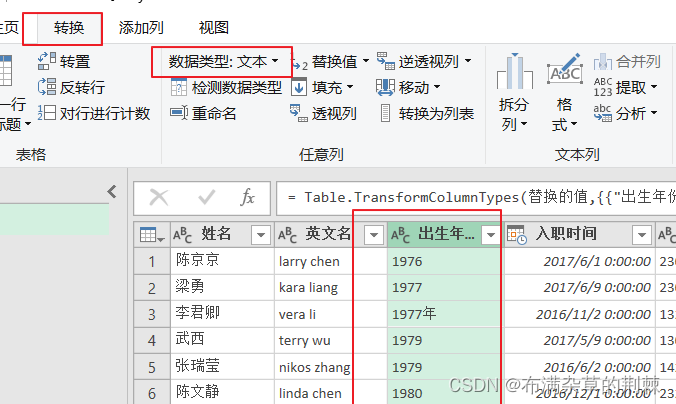
3.数据格式之间的转换
想把年替换为空,格式保持一致
没有替换成功
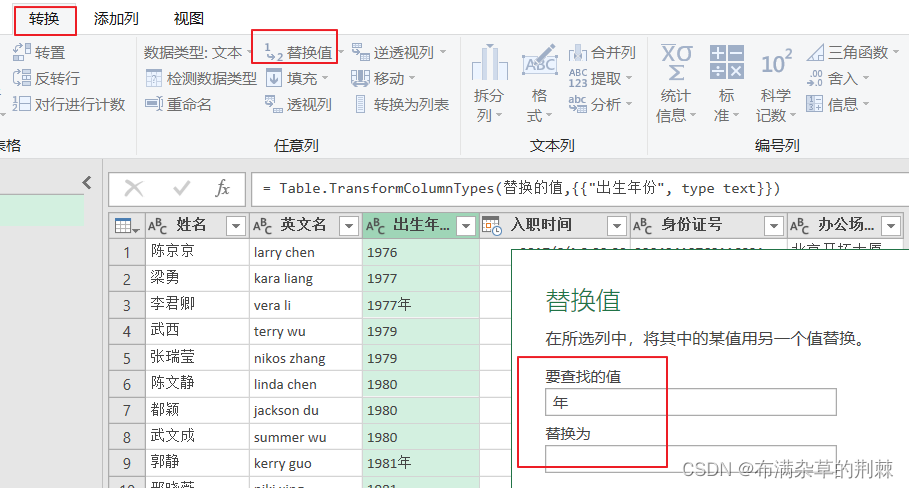
可以先将数据的类型转换为文本,在进行替换
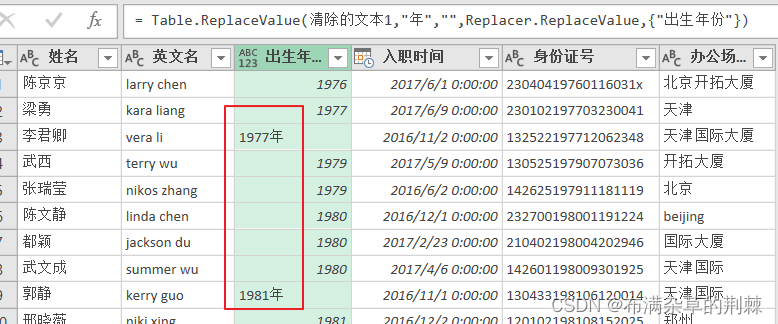
将年替换为空
替换成功,如果碰到操作不成功的可以更改一下数据格式

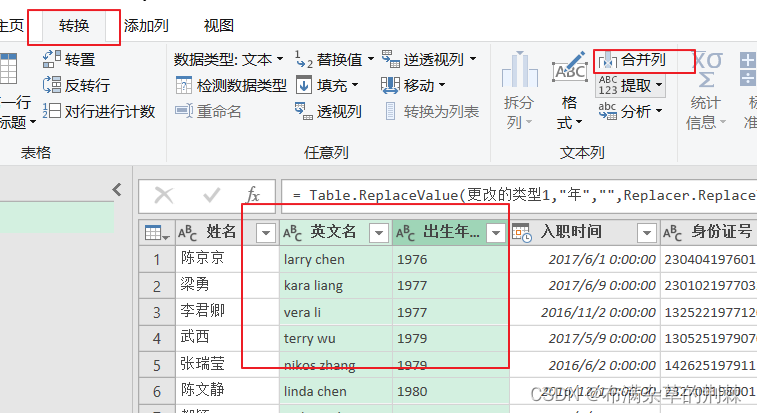
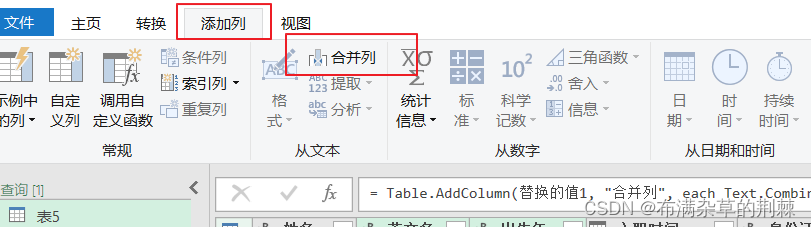
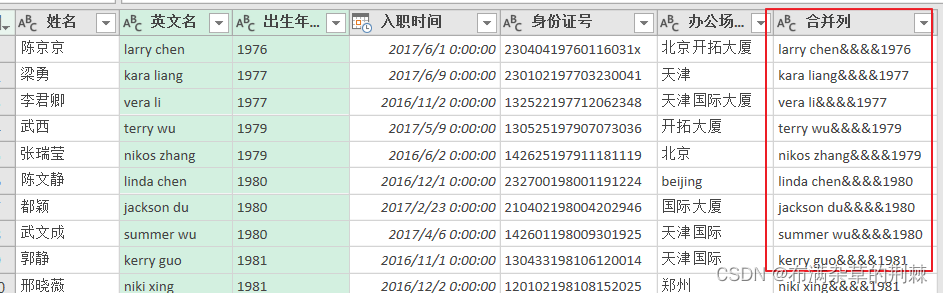
4.合并列
必须要选中至少两列(先选的列在前)
转换----选中一列---ctrl---选中另一列---合并列
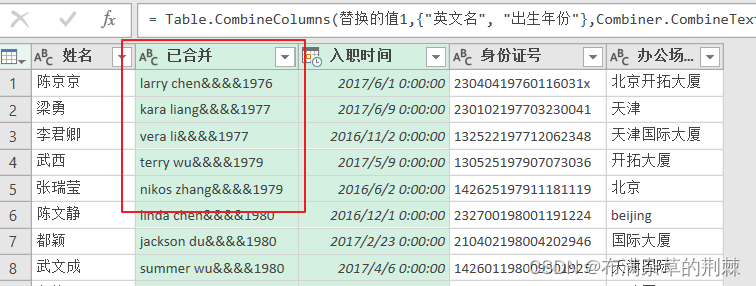
可以自定义分隔符或者选择已有的分隔符
原有的数据被破坏
如果想保留原有数据,在新建一列合并列,就要在添加里面选择合并列

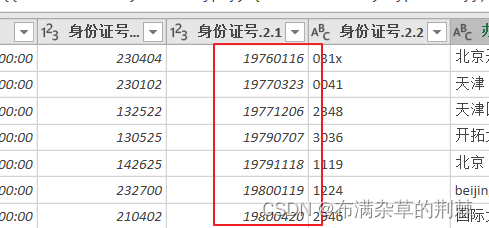
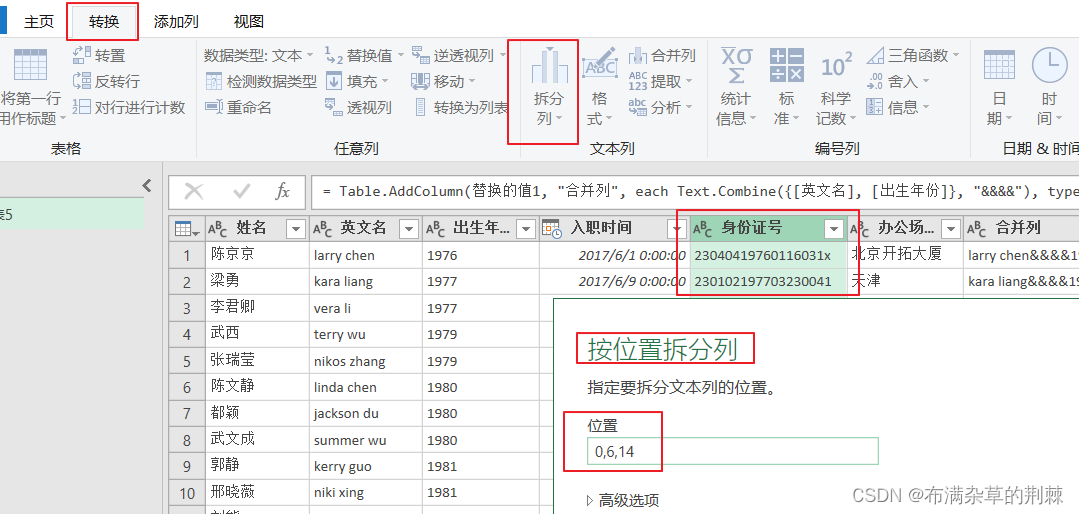
5.拆分列
将身份证号拆分出生日
①按字符拆
②按位置拆分



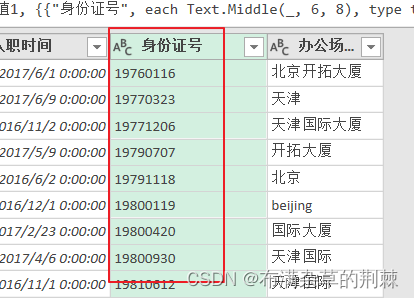
6.提取信息
破坏原数据(转换)----提取身份证号中的生日
转换---提取----范围
6(前面去掉的位数)8(提取的位数)
保留原数据----提取身份证号中的生日t
添加列---提取----范围





7.数据合并追加和更新
主页---合并查询
所选择的顺序必须一致
将没有的列选出来



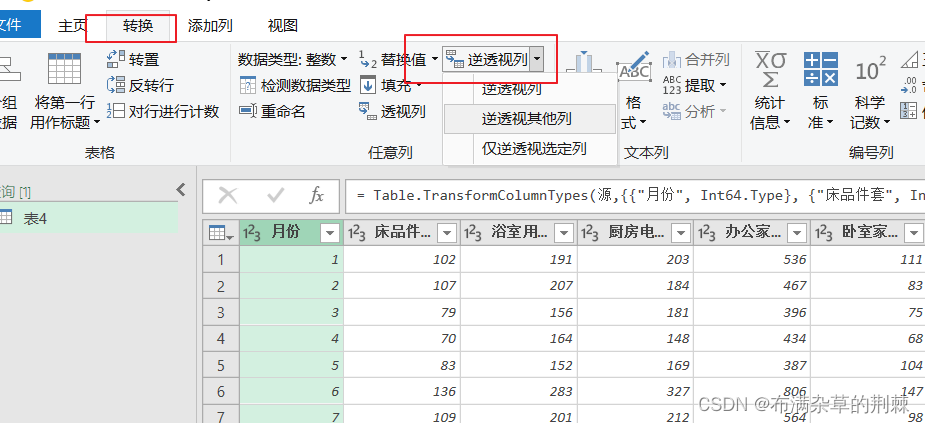
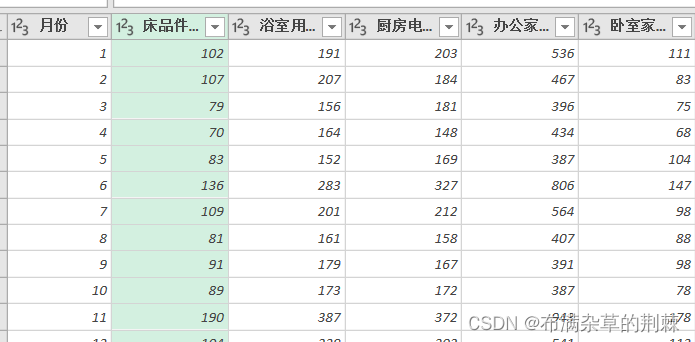
7.逆透视列
转换--- 逆透视列(将二维转换为一维)
可以选择逆透视其他列

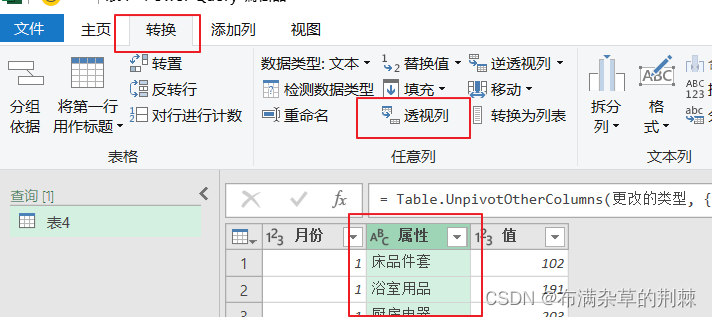
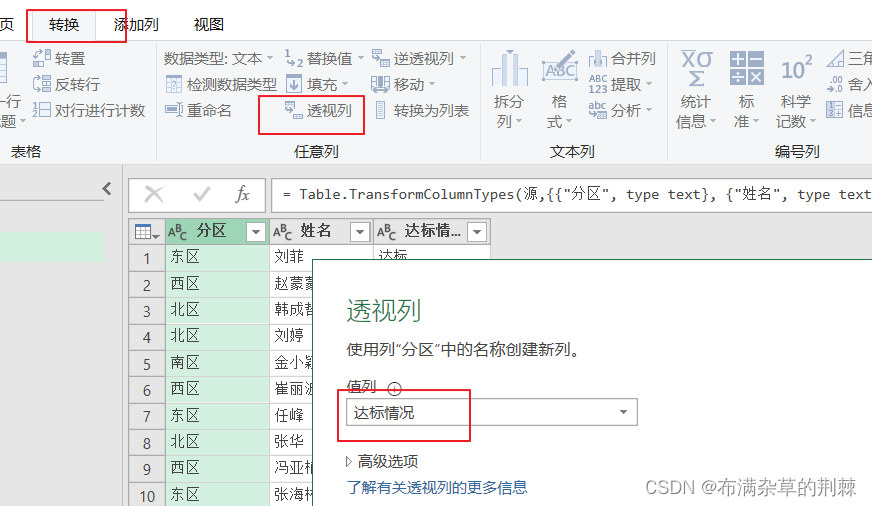
8.透视列
转换---透视列(选中要透视的列)

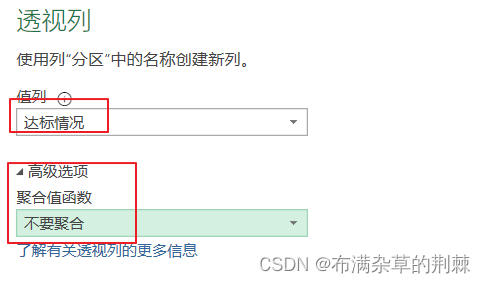
9. 不要聚合(保留文本结果)
聚合完,显示的数字0和1
选择不要聚合
显示正确


9.分组依据(快速生成关键结果)
主页---分组依据
填选分组的依据



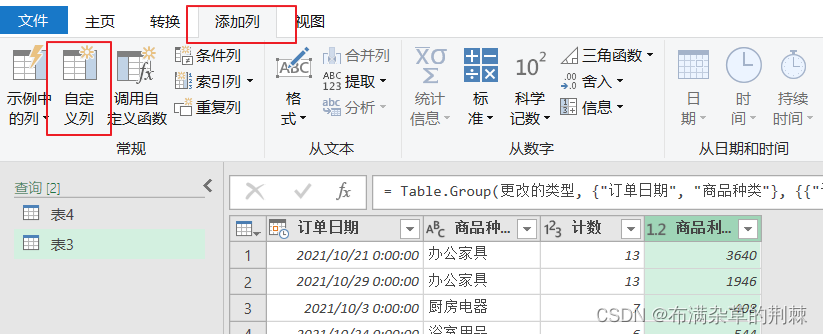
10.添加列
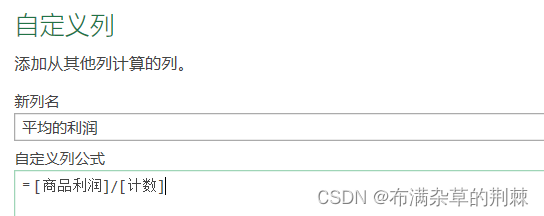
添加列====自定义列
计算平均的利润
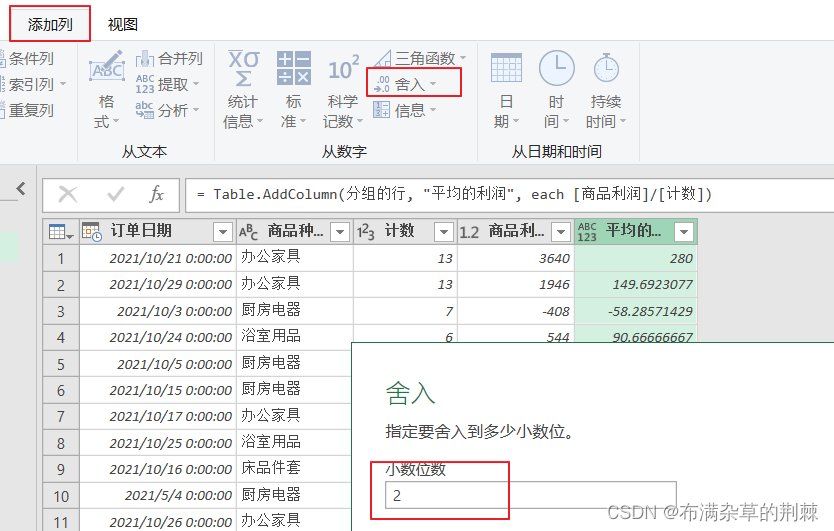
看着复杂可以:舍入----选则两位
保留两位小数