沈阳网站制作建设开发一款视频app多少钱
目录
- 原视频
- 准备
- 烧录
原视频
b站鱼香ros
准备
1.在某宝上买一个usb移动固态硬盘或固态U盘,至少64G

2.下载鱼香ros烧录工具
下载第二个就行了,不然某网盘的速度下载全部要一天

下载后,选择FishROS2OS制作工具压缩包,进行解压
3.记住移动硬盘的名称
烧录
打开fishros2os_tools.exe

1.选择小鱼提供的默认镜像(里面有ubuntu22.04.3系统,安装有ros2+humble系统和VScode)
如果你想要纯净的ubuntu系统,自己下载ubuntu镜像进行烧录
2.选择移动磁盘,记住名称
3.点击烧录

等待5分钟,就可以烧录完成。
烧录完毕
拔掉移动硬盘
关机电脑
重新插上移动硬盘
开机(在开机的过程中按功能键)
我的联想小新电脑按F12键 ,(不同电脑按键不一样,不知道直接百度搜:某某电脑开机按什么键进入启动设备选择界面)
选择你的移动盘的名称 ,点击回车
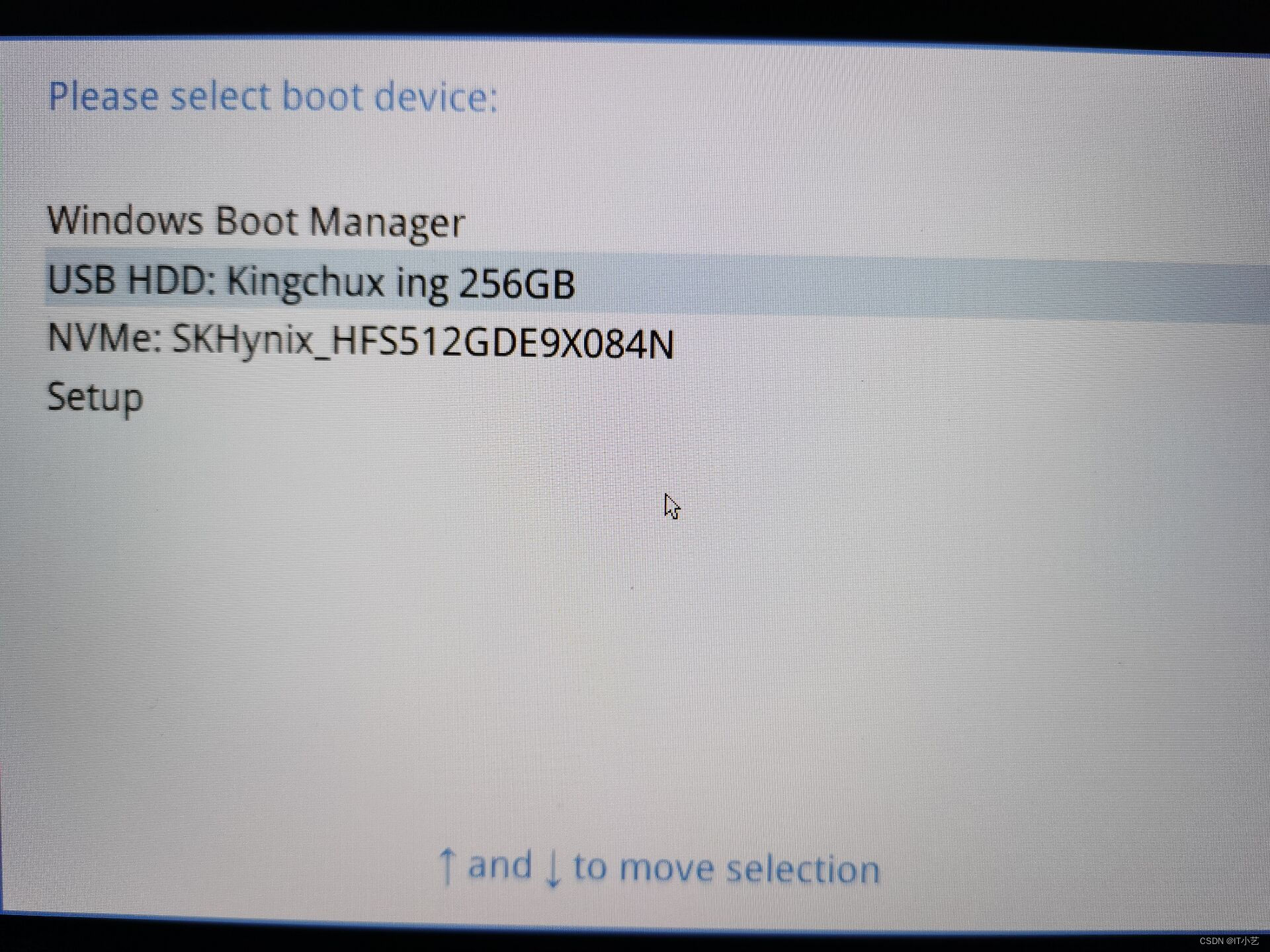
看到ubuntu界面
输入密码 fish 进入桌面
连接WIFI
小鱼提供的镜像已经安装有ros2-humble系统和VScode
在终端输入ros2检查ros2系统是否正常
在终端输入 fishinstall 运行一键安装,安装你要的工具和软件
想要退出ubuntu系统,关机–>拔掉移动盘即可。
想要用ubuntu系统,开机–>按功能键–>选择移动盘 进入系统
在移动固态硬盘上安装Ubuntu系统的时候,会把你电脑相关的驱动适配到ubuntu系统里,所以你把移动固态硬盘插到别的电脑使用系统时,可能出现驱动不适配的问题。如果想实现在不同电脑即插即用
参考:
Ubuntu系统安装在移动固态硬盘,实现在不同电脑即插即用
使用DiskGenius进行修改