南宁网站制作计划电子商务网站后台核心管理
windows的apipost发送请求后,服务器响应了HTTP/1.1 404 Not Found,但是apipost一直显示发送中。
linux上的curl也一样。
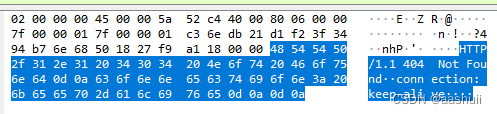
使用wireshark抓包发现收到了响应,但是wireshark识别不了(图中是回应404后关闭了连接):

第一个报文是HTTP/1.1 404 Not Found响应,但并没有识别出来,wireshark认为是一个不完整的HTTP报文(TCP segment of a reassembled PDU),但HTTP实际上是完整的,结尾带了两个\r\n(0d 0a 0d 0a):
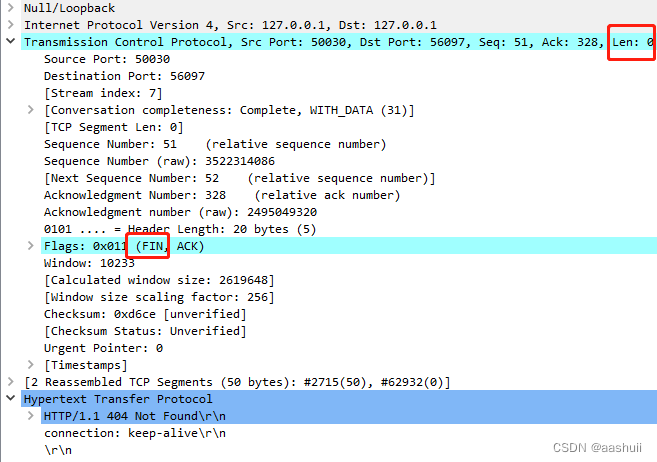
第二个报文是服务器发送的FIN,里面并没有应用层数据,Len=0:
不清楚为什么认为这个HTTP报文不完整,只能在服务器上手动增加了:
FullHttpResponse resp = new DefaultFullHttpResponse(HttpVersion.HTTP_1_1, HttpResponseStatus.NOT_FOUND);
//netty服务器默认不包含CONTENT_LENGTH 需要手动设置
resp.headers().set(HttpHeaderNames.CONTENT_LENGTH, 0);
之后wireshark抓包正常了,apipost也能收到了:

这是因为在HTTP/1.1中,链接是复用的,如果没有content-length就无法区分两个HTTP报文的边界(粘包),也就是说HTTP/1.1如果是keep alive(没有connection也默认是keep-live),则content-length和chunk必然是二选一。
有一些响应码可以没有content-length,但404响应必须包含body,可以是0,来自RFC2616:
对于响应消息,消息里是否包含消息主体依赖相应的请求方法和响应状态码。所有HEAD请求方法的请求的响应消息不能包含消息主体。所有1XX(信息的),204(无内容)和304(无修改)的响应都不能包括一个消息主体(message-body)。所有其他的响应必须包括消息主体,虽然可能长度为零.
。。。。
服务器响应为40x,除了响应HEAD请求,都应该包含一个message-body,message-body包含一个此错误请求的解释。