建立wordpress网站吗网络营销的推广方式都有哪些
数码家电品牌发展迅速,投影同样也是一种更新迭代较快的产品类型,有时候去年还比较火的产品,今年就会被别的产品取代,就比如之前灯泡投影一直被认为是好产品的代表,但是现在国产激光投影的销量反而更高。一般来说6000元左右是属于很多家庭选择的投影价格段位,那么2024年有哪些热门的6000元价位投影可以选择的,哪款6000元价位投影最值得买?

一、6000元的投影仪属于什么段位
6000元的投影仪基本已经属于中高端投影级别了,如果你买的是正经大品牌产品,这个价位的投影已经可以满足绝大多数家庭对投影大屏的需求,目前这个价位上市面上比较火的也多数是国产大牌的激光投影产品,配置也都是一个比一个卷,在往上的价格就是要追求极致的视觉体验了。
二、6000元的投影购买注意事项
上面我们也提到了现在市面上销量较高的、热门投影多数是国产大品牌的激光投影,销量和口碑其实也是间接说明这款投影他值不值得买。
既然价位已经升级到了6000元那么我们就不能去看一些杂牌子投影,当然买之前也一定要学会辨别,有些二手平台会用杂牌投影冒充大品牌投影,做过攻略的人才不会被骗,所以这篇6000元投影仪购买攻略一定要认真看完。
为什么说买国产大品牌性价比更高,之前灯泡投影在国内销量更多普遍被大众接受,但是随着国产投影发展越来越好,国产投影不仅注重发展光机技术,也更注重发展系统体验,系统设计的一个比一个卷,体验也是越来越好,国外的灯泡投影使用体验反而比不上国产投影大品牌了。

而系统体验以及一些快捷功能上,灯泡投影是远远比不上了,使用体验大打折扣,所以买国产大牌投影不仅可以获得优秀的画质,也可以或者更贴心的使用体验。
2、要买对光源
现在买投影之前一定要研究好光源这项技术,光源就可以将投影分出不同的派别,就像上面说的灯泡光源就是传统投影,LED光源之前被做过主流投影流行过一段时间,不过现在激光投影技术更好,口碑更好。
不过一个激光光源也分好几种,有ALPD激光、三色激光和护眼三色激光;ALPD激光是一种高亮没有任何散斑和色边的光源,画面看起来比较清透舒适,而三色激光和护眼三色激光都有散斑和色边的缺点,并且由于技术不成熟,目前还无法解决这些问题,很多宣传已经解决散斑和色边问题的品牌也都是在夸大宣传,真实情况就是用户买回来还是能看到。
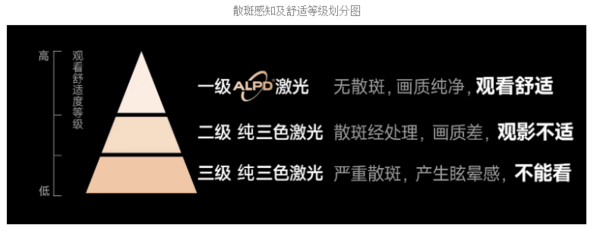
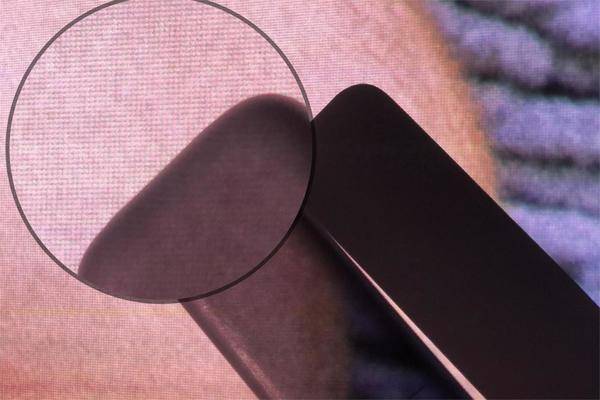
可能刚接触投影的朋友还不了解什么叫散斑和色边,这是三色激光最严重的缺点;散斑就是近看画面有无数小网格,远看画面像蒙了一层膜,会降低画面的清晰度;色边就是字幕上有红蓝彩边,这种彩边看了会使人头晕,长期看对眼睛也不友好,护眼三色激光也是一样的道理,所以虽然三色激光画面色彩比较浓郁,但是还是不建议使用三色激光投影仪。

一、六千元有哪些热门投影
目前这个价位上下的市面上销量比较高的激光投影有当贝X5S Pro、坚果N1S Pro和极米RS 10 Pro,笔者前段时间正好都买回来测评了一下。这三款中当贝X5S Pro是ALPD激光光源的,坚果N1S Pro是传统三色激光和极米RS 10 Pro是护眼三色激光,这里面只有当贝X5S Pro的画质是最护眼的,因为使用的是ALPD激光完全无散斑无色边。

从这三款的参数我们就能看出当贝X5S Pro的亮度是最高的,有3300CVIA流明,坚果N1S Pro亮度只有2500CVIA流明,极米RS 10 Pro有3000CVIA流明,极米的当贝的亮度都偏高,不过极米这款的售价快到8千,而当贝X5S Pro的售价只有六千多,可加当贝X5S Pro的亮度性价比更高。

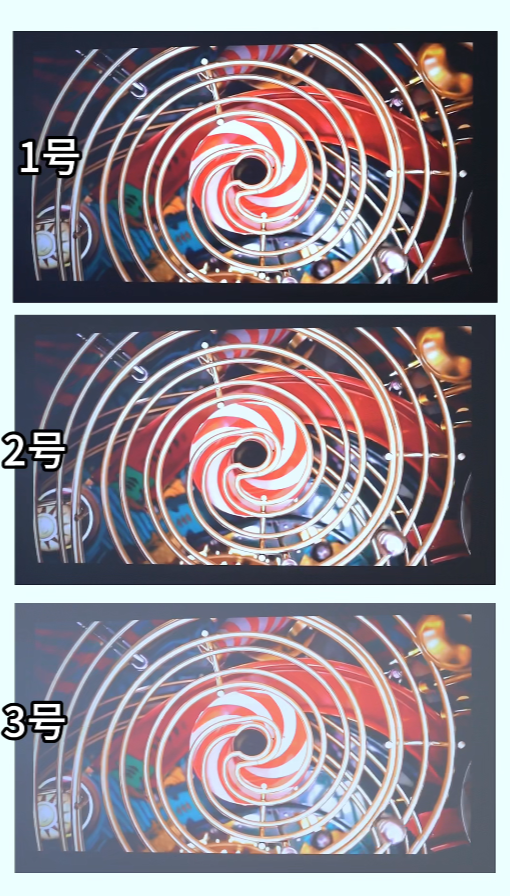
在三款都是4K分辨率的配置下,我们看实际投射的画面1号是当贝X5S Pro的画面,2号是坚果N1S Pro的画面,3号是极米RS 10 Pro的画面,极米的随便标称亮度数值高,不过实际亮度也一般,当贝X5S Pro是三款里面色彩表现最好的。
当贝X5S Pro不仅画质表现是最好的,配置也是最高的,内置的是行业最顶尖的处理器MT9679,其他两家都是上一代款式MT9669,性能要弱很多,当贝X5S Pro还有超大的存储4+128GB存储空间一般只在万元投影上出现过,差不多的价位当贝X5S Pro亮度更高,画质更好,配置也更高。

四、6000元价位段:最值得买的家用投影推荐
从上面的三款投影我们也能看出当贝X5S Pro是6000元价位最值得买的家用激光投影,除了拥有3300CVIA流明高亮度、4K超高清分辨率、MT9679顶级处理器和4+128GB超大存储,这款机器还比人家多了一个USB3.0接口,可以拓展更多的使用设备,内置体验感更好的当贝OS4.2系统。

当贝OS4.2系统不仅有全自动对焦、智能梯形校正、智能避障和幕布自适应的速度更快,灵敏度也更高;除了有【分屏播放】【XSuper超分辨率】功能外,还新增了【画质大师】【隔空手势触控】等超多黑科技功能去提升用户使用体验感,全方位打造一款性能高体验感强的家用投影,如果你也想买台6000元价位的家用投影,当贝X5S Pro最适合。