欣宝儿在什么网站做直播餐饮装修公司
🌈 个人主页:白子寰
🔥 分类专栏:python从入门到精通,魔法指针,进阶C++,C语言,C语言题集,C语言实现游戏👈 希望得到您的订阅和支持~
💡 坚持创作博文(平均质量分80+),分享更多关于深度学习、C/C++领域的优质内容!(希望得到您的关注~)

目录
环境搭建
1.官网链接
2.根据操作提示顺序进行
①
②
③
测试python安装是否成功
①
②
编辑
安装pycharm
①
②下一步
③
④
⑤
测试python安装是否成功
①
②
③Don't sent
④
创建python项目
①
②
③
④项目名称命名
⑤测试代码和运行
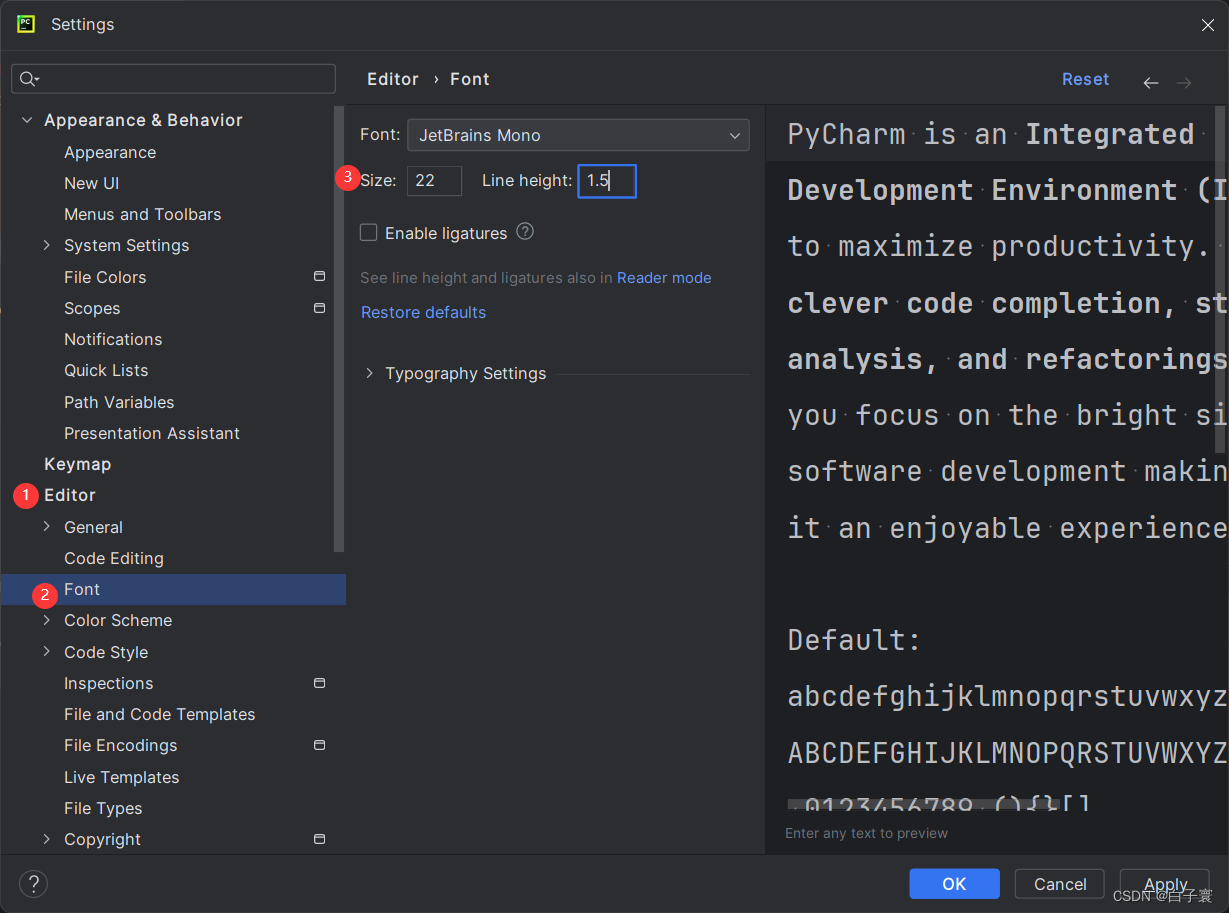
设置字体大小和行间距
①
②
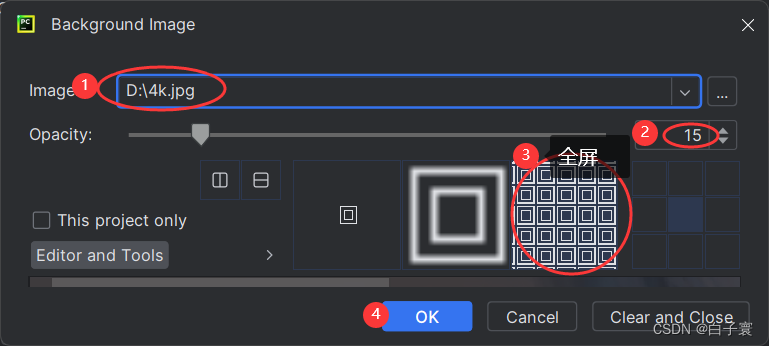
设置背景
①
②
环境搭建
1.官网链接
python官网![]() https://www.python.org/
https://www.python.org/
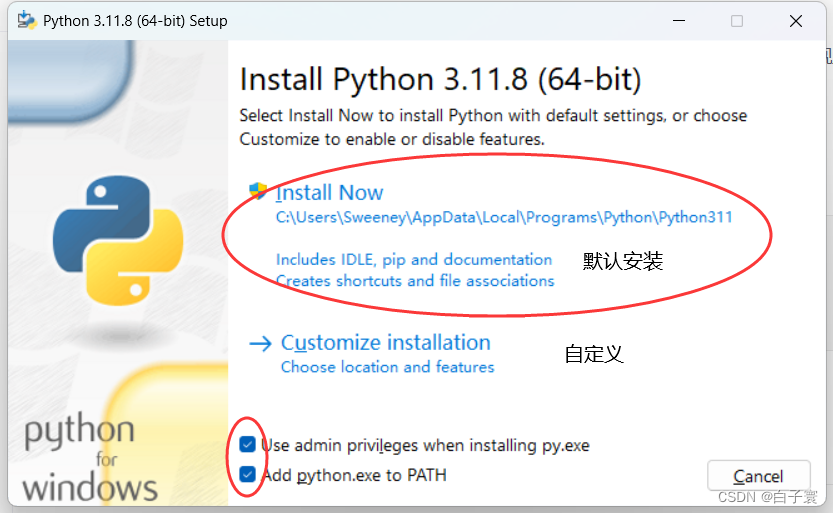
2.根据操作提示顺序进行
①

②
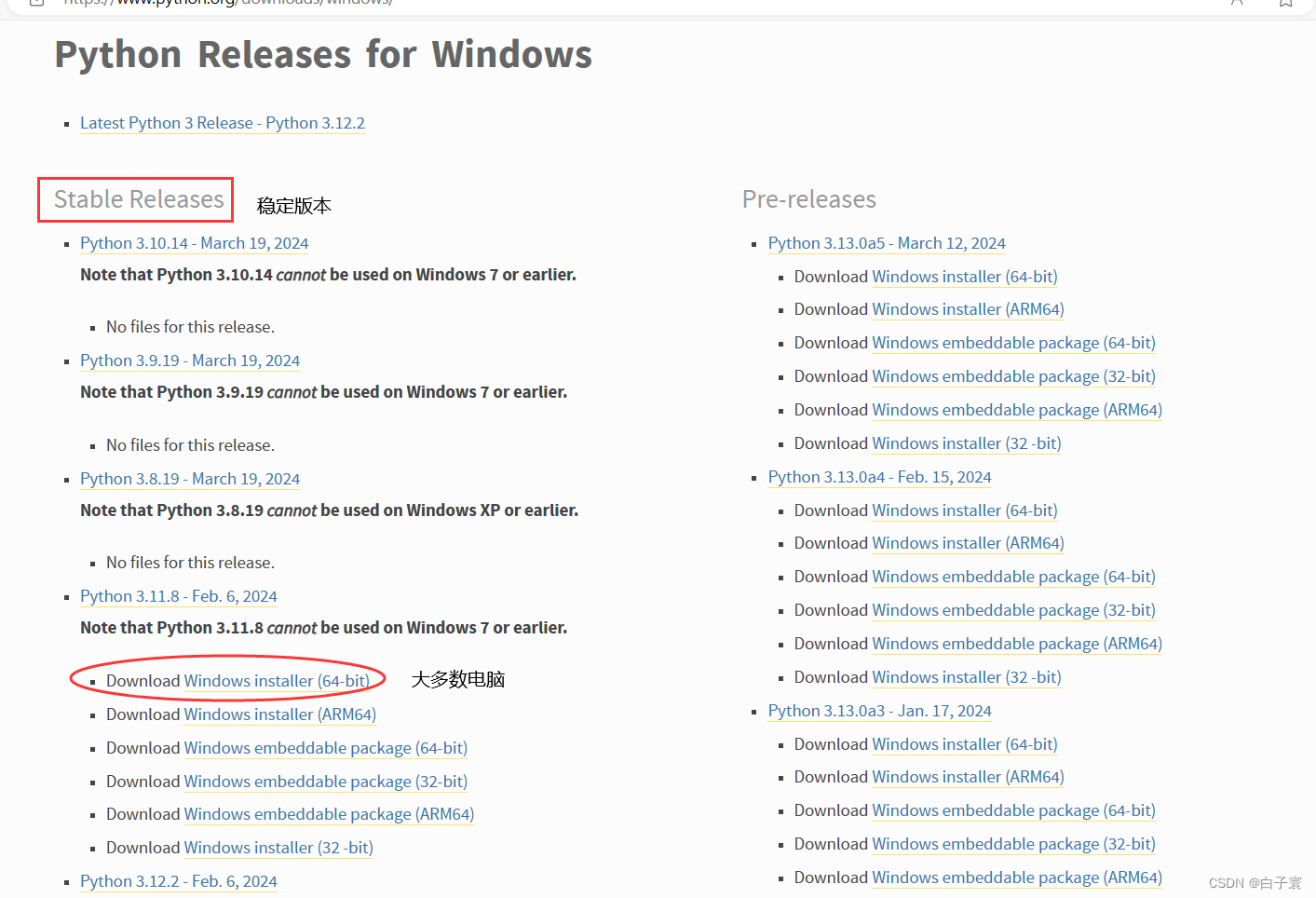
由于python官网是国外的,下载速度较慢,需耐心等待
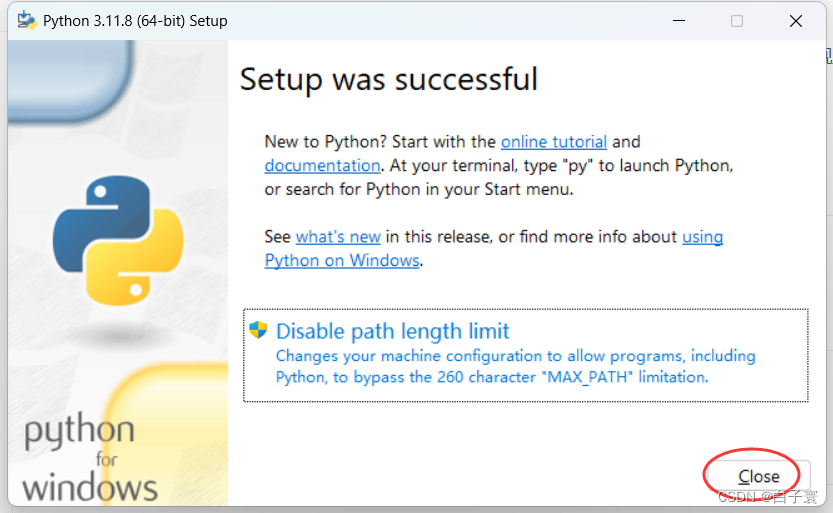
③
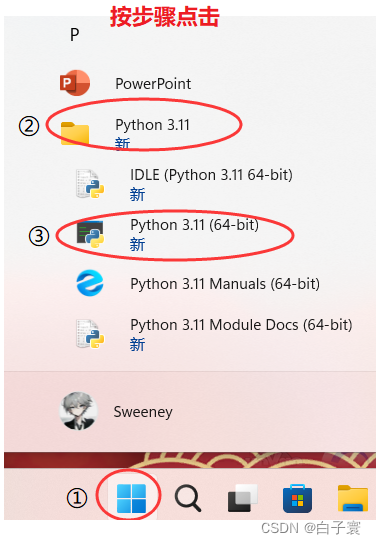
测试python安装是否成功
①
看到👇界面,就说明安装成功了
②
接着控制台测试

安装pycharm
安装pycharm网站![]() https://www.jetbrains.com/pycharm/download/?section=windows
https://www.jetbrains.com/pycharm/download/?section=windows
①
滑倒下面,看到社区版是免费的
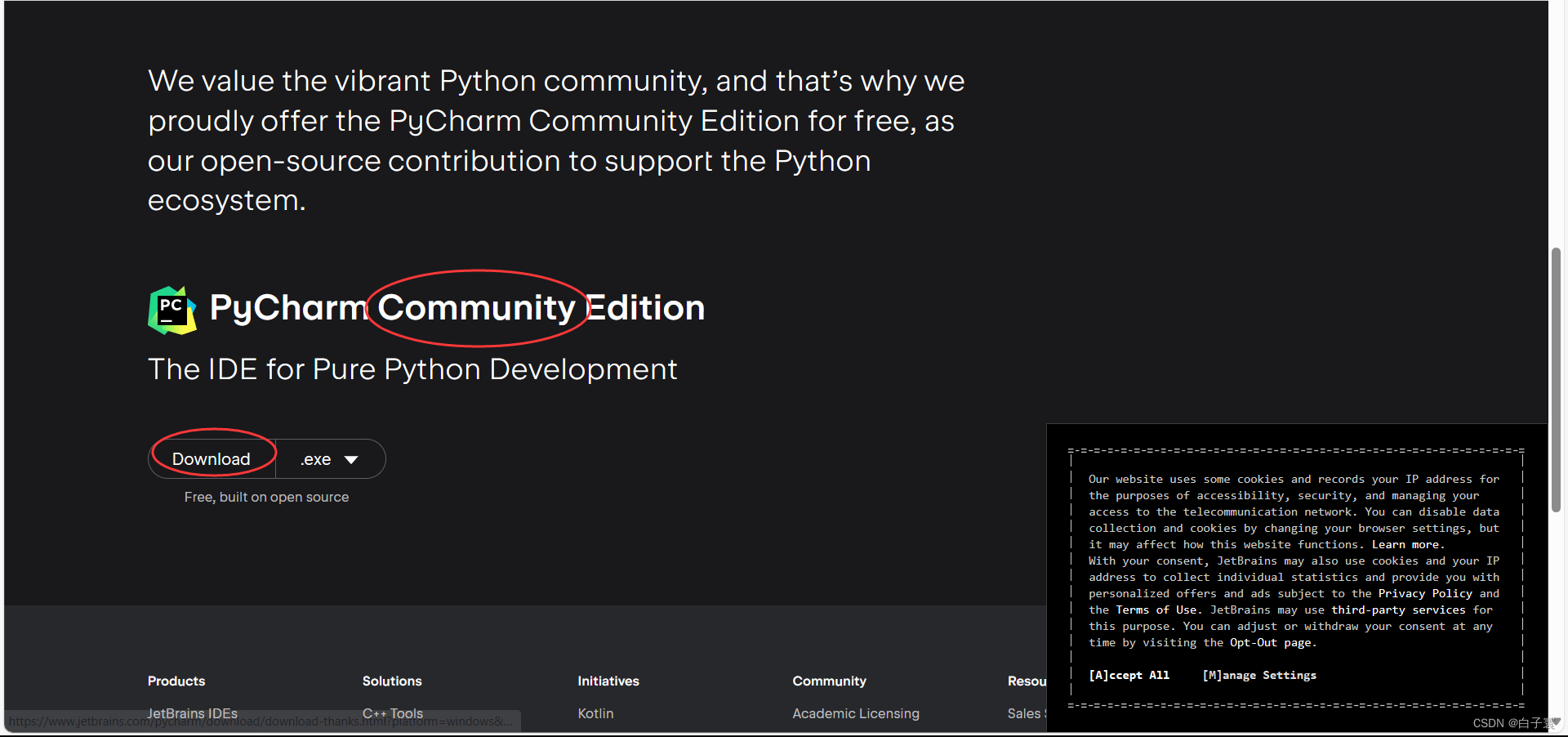
②下一步
③
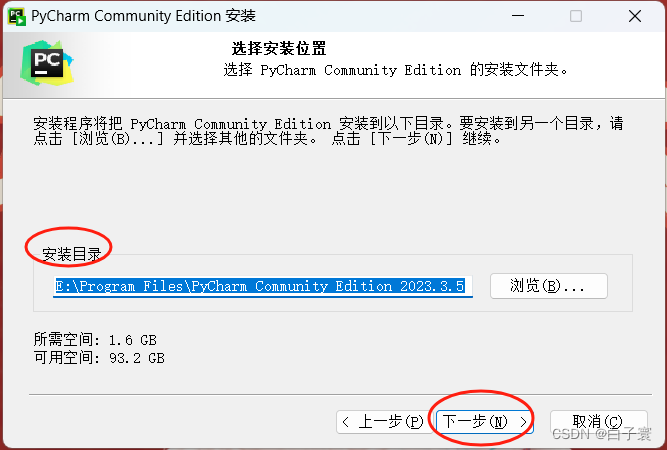
④
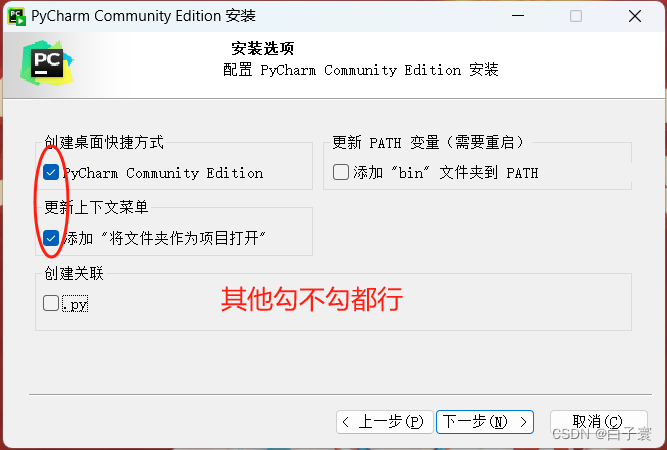
⑤
下一步 --> 下一步 --> 完成
测试python安装是否成功
①

②

③Don't sent
④
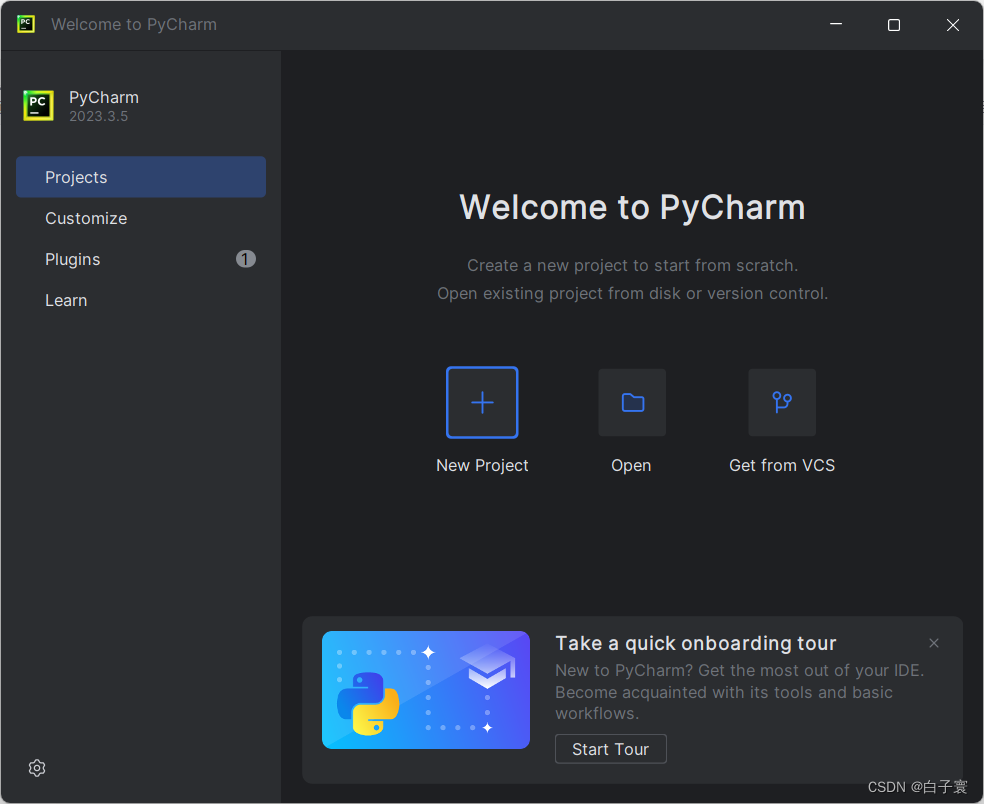
创建python项目
①

②

③

④项目名称命名

⑤测试代码和运行

设置字体大小和行间距
①

②
设置背景
①

②
***********************************************************分割线*****************************************************************************
完结!!!
感谢浏览和阅读。
等等等等一下,分享最近喜欢的一句话:“彼方尚有荣光在,何须悲叹少年轻”。
我是白子寰,如果你喜欢我的作品,不妨你留个点赞+关注让我知道你曾来过。
你的点赞和关注是我持续写作的动力!!!
好了划走把。