网站经常做封面的那些番号东莞详情页设计
基本介绍
Linux的文件系统是采用级层式的树状目录结构,在此结构中的最上层是根目录"/",然后在根目录下再创建其他的目录
在Linux中,有一句经典的话:在Linux世界里,一切皆文件
Linux中根目录下的目录
具体的目录结构
- /bin:是Binary的缩写,这个目录结构存放着最经常使用的命令,比如cd、chmod等等;
- /sbin:s就是super user的意思,即超级用户,所以该目录存放的是系统管理员才可以使用的系统管理程序,或者说系统管理员才有权限使用的命令;
- /home:存放着普通用户的主目录。在Linux中每个用户都有一个自己的目录,一般该目录名是以用户的账号命名。比如在Linux中创建了一个名为“test1“的用户,那么就会在home目录下自动生成一个test1的文件夹,当删除该用户时,该文件夹也会自动删除;
- /root:该目录为系统管理员,也称为超级权限者的用户主目录。其实就是我们常说的root用户,普通用户的用户主目录放在home下面,而root用户的主目录是根目录下的一个单独文件夹
- /lib:Linux系统开机所需要的最基本的动态连接共享库,其作用类似于Windows里的DLL文件,几乎所有的应用程序都需要用到这些共享库
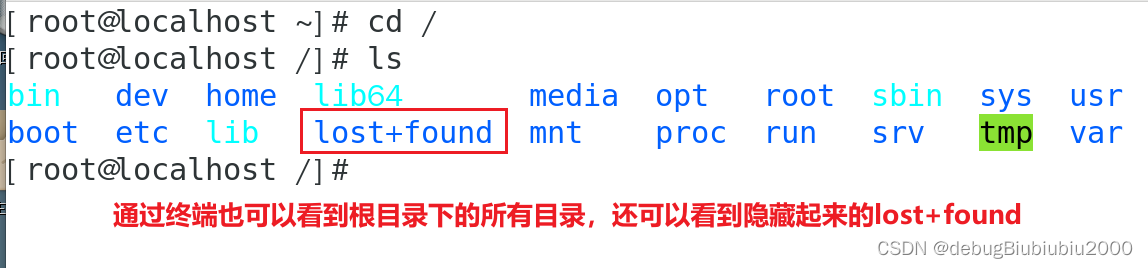
- /lost+found:这个目录一般情况下是空的,当系统非法关机后,这里就存放了一些文件,这个目录一般在Linux桌面的文件夹中看不到,它是隐藏的,但是可以在终端通过ls命令看到
- /etc:所有系统管理所需要的配置文件和子目录,比如安装了MySQL数据库,那么MySQL数据库的配置文件my.conf就会放在该目录下;
- /usr:这是一个很重要的目录,用户的很多应用程序和文件都放在这个目录下,类似于Windows下的program files目录。比如用户安装一个浏览器,一般默认放在该目录下;
- /boot:存放的是启动Linux时使用的一些核心文件,包括一些连续文件以及镜像文件;如果该目录中的文件被破坏,Linux系统就会启动不了
- proc:【该目录不能动】这个目录是一个虚拟目录。它是系统内存的映射,访问这个目录来获取系统信息
- srv:【该目录不能动】service缩写,该目录存放一些服务启动之后需要提取的数据
- sys:【该目录不能动】该目录下安装了Linux2.6内核中新出现的一个文件系统sysfs
- tmp:这个目录用来存放一些临时文件
- /dev:类似于Windows的设备管理器,把所有的硬件用文件的形式存储
- /media:Linux系统会自动识别一些设备,如U盘、光驱等,当识别后,Linux会把识别到的设备以文件的形式存储并挂载到这个目录下(所谓的挂载,比如插入一个U盘,被Linux识别,变成名为A的文件,并把文件A放在该目录下)
- /mnt:系统提供该目录是为了让用户临时挂载别的文件系统,我们可以将外部的存储挂载在/mnt/上,然后进入该目录就可以查看外部的内容了。说人话就是,比如外面的Windows有一个文件夹A,A里有一个hello.txt文件,然后可以通过共享文件夹的方式把Windows上的文件夹A和虚拟机上的Linux系统共享,那么就会在Linux系统里的/mnt的文件夹下有一个文件夹B(可能是其他的名字),文件夹B里就会有文件夹A(这个A就是Windows上的A),然后打开A就可以看到A里的hello.txt文件。在这个例子中,Windows就是别的文件系统,文件夹A就是外部的文件系统的存储,挂载在/mnt/上指的就是可以在mnt目录里可以看到文件夹A;
- /opt:这是给主机额外安装软件所存放的目录,默认为空。我理解的是这个目录就是放软件安装包(比如Windows版的exe文件,或者压缩包之类的)的;
- /usr/local:这是另一个给主机额外安装软件所安装的目录,存放的一般是通过编译源码方式安装的程序。我的理解就是(我不确定对不对),上面的/opt目录存放软件安装包,然后用安装包安装软件时选择软件的存储位置就是在/usr/local下;比如Windows里的exe(这只是以Windows举例,实际Linux中安装的软件用的不是exe)文件放在opt目录下,点击exe安装软件时,一般会有一个步骤是选择软件的安装位置,在Linux中这个安装位置就是/usr/local
- /var:这个目录存放着在不断扩充着的东西,习惯将经常被修改的目录放在这个目录下,包括各种日志文件;
- /selinux:security-enhanced linux的缩写,是一种安全子系统,它能控制程序只能访问特定文件,有三种工作模式,可以自行设置