给企业做网站用什么程序wordpress noinput
一、线程组
1.1 作用
线程组就是控制Jmeter用于执行测试的一组用户
1.2 位置
右键点击‘测试计划’-->添加-->线程(用户)-->线程组
1.3 特点
- 模拟多人操作
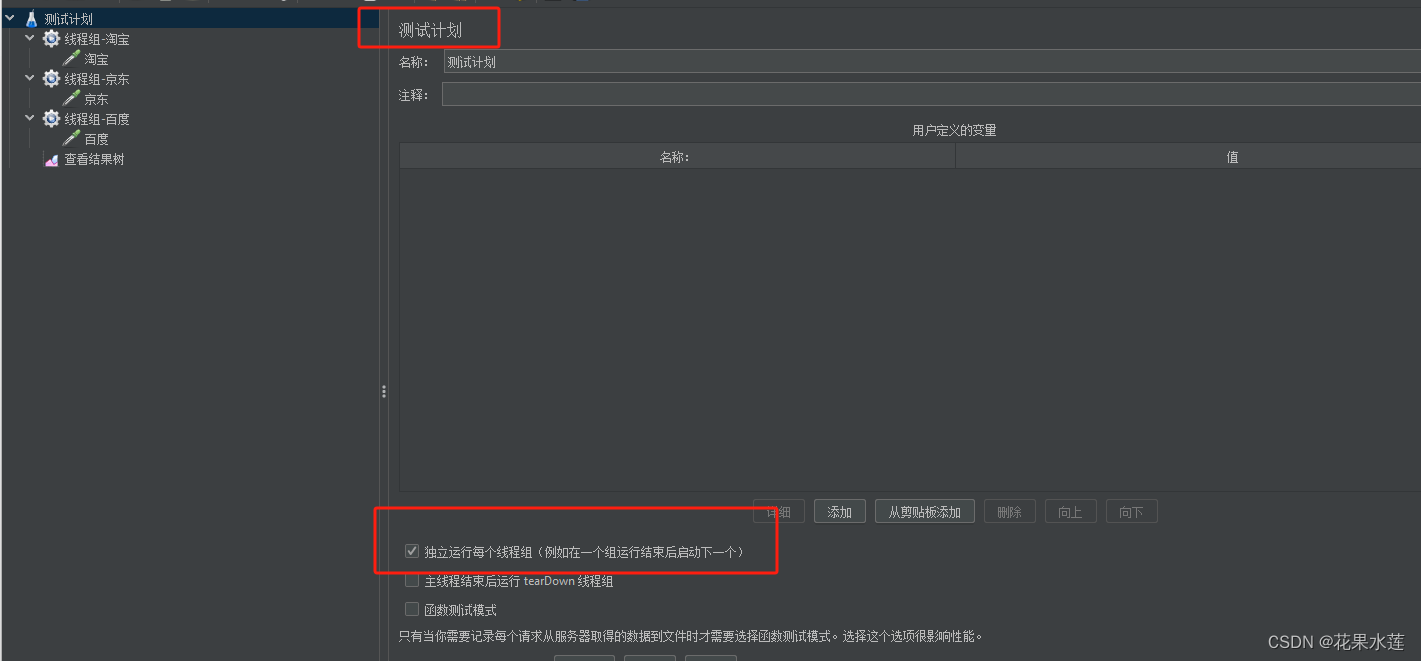
- 线程组可以添加多个,多个线程组可以并行或者串行
- 取样器(请求)和逻辑控制器必须依赖线程组才能使用
- 线程组下可以添加其他元件下组件
注:默认多个线程组是串行,点击测试计划,可以设置成串行
1.4 线程组分类
- 线程组:
普通的、常用的线程组,可以看成一个虚拟用户组,线程组中的每一个线程都可以理解为一个虚拟用户
- setUp线程组
一种特殊类型的线程组,可用于执行预测试操作
- tearDown线程组
一种特殊类型的线程组,可用于执行测试后的操作
1.5 参数详解
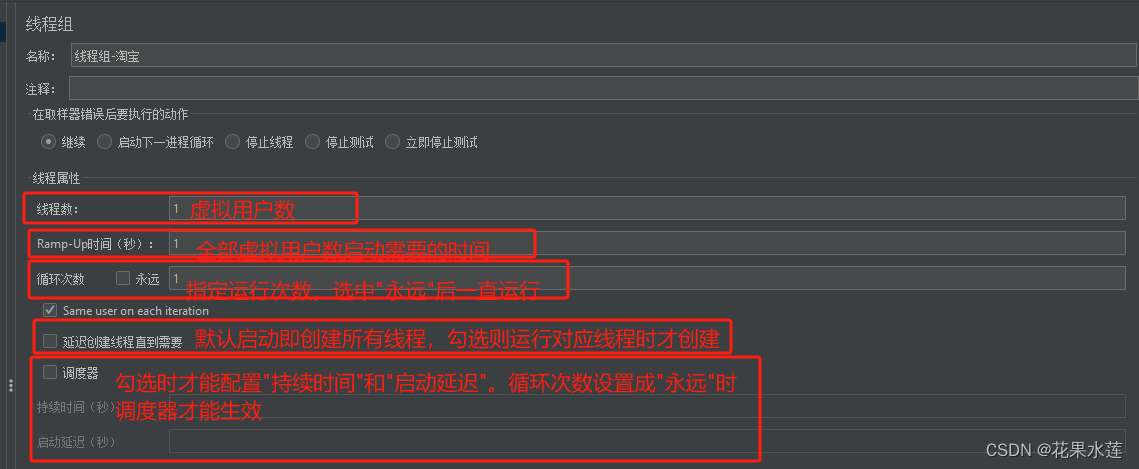
注:循环次数设置成"永远",一般和调度器配合使用。持续时间:脚本运行时间