网站开发数据库设计dedecms建手机网站
本文介绍一下基于matlab实现积分函数拟合的过程。采用的工具是lsqcurvefit和nlinfit两个函数工具。关于包含积分运算的函数,这里可以分为两大类啊。我们用具体的案例来展示:一种是积分运算中不包含这个自变量,如下图的第一个公式,也就是说它这个积分运算只有R和Q这两个待定参数,不包含自变量。虽然这里的自变量是,但这里的
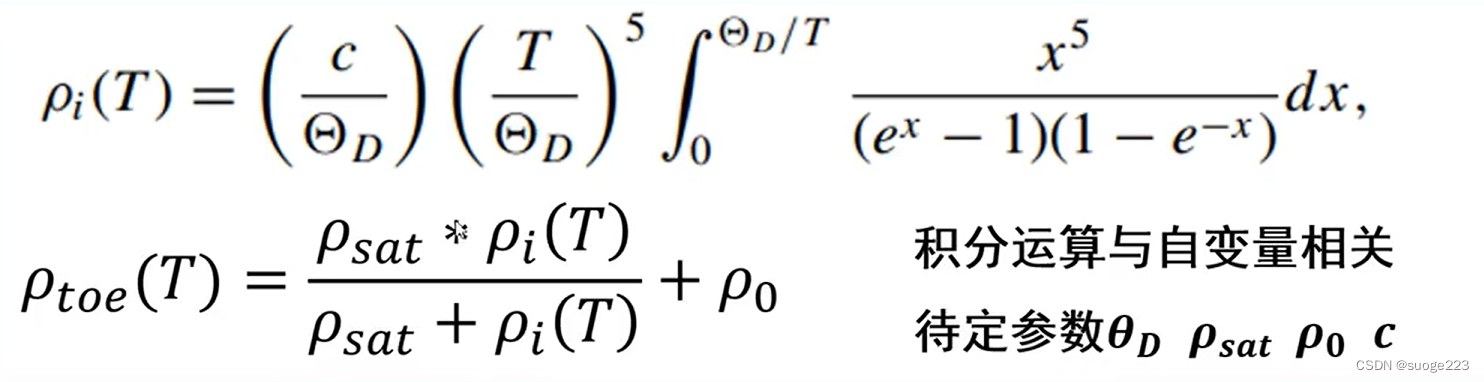
它积分运算中的被积变量。另一种类型是积分运算中存在自变量的积分函数它的拟合,如下图的第二个公式。积分变量它的积分上下限存在自变量T。

先看第一个案例。代码分为主文件和自定义函数文件,主文件代码三个部分。第一个部分是数据读取啊,第二个部分是拟合,第三个部分是结果展示。因为我们这个呃要拟合的这个函数,它的这个自变量是,物理背景是一个角度值,