开源建站软件社交网站开发外文
文章目录
- 参考连接
- 重要路径
- 系统镜像下载
- 访问 BeagleBone
参考连接
- 镜像下载
- 启动系统制作:SD卡烧录工具
- 入门书籍推荐:BeagleBone cookbook
- BeagleBone概况?
重要路径
- 官方例程及脚本路径:
/var/lib/cloud9
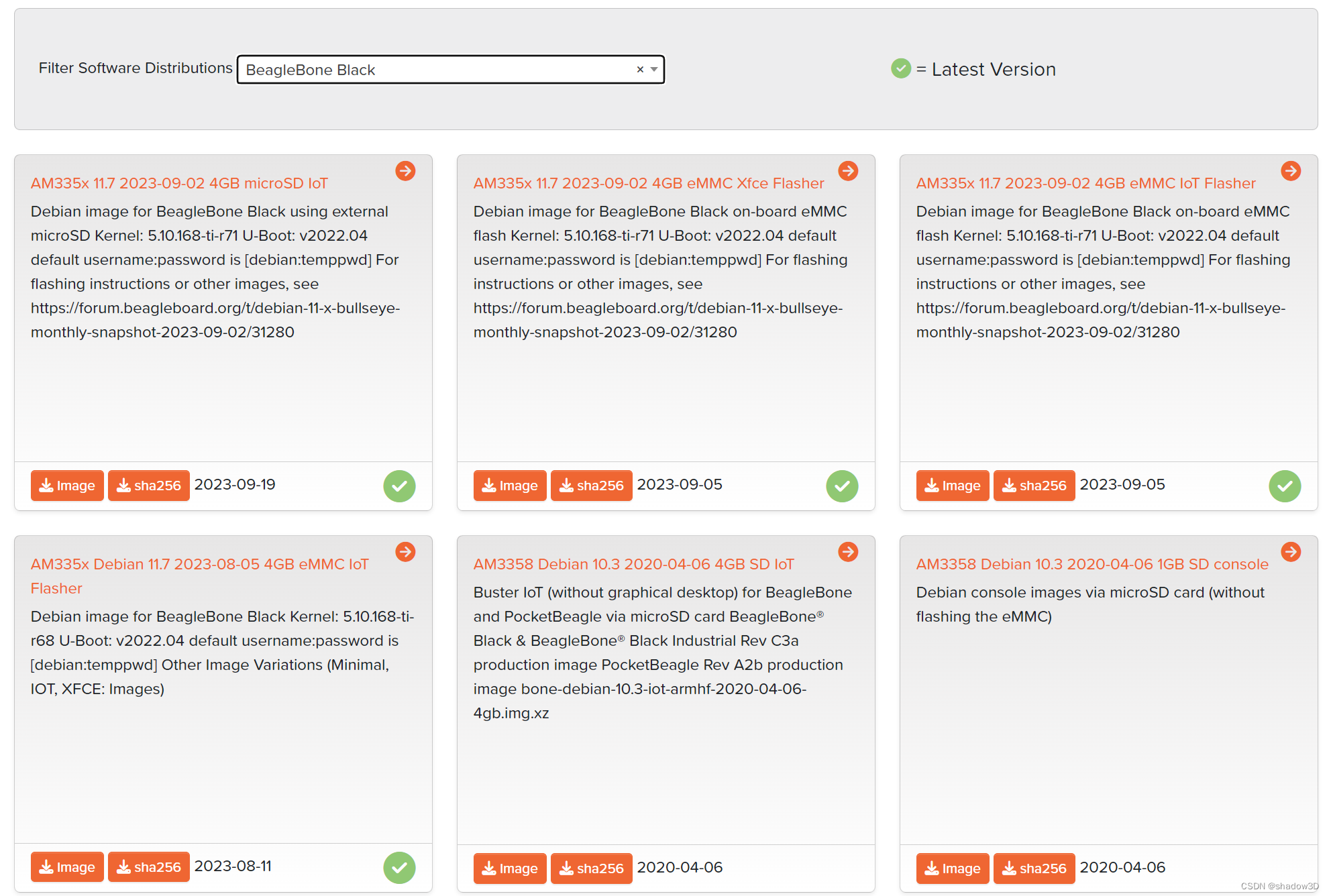
系统镜像下载
疑问:以下这些镜像有什么区别?带microSD的是只能在SD卡启动才行吗?带eMMC的是只能在板上的eMMC内才能正常启动吗?
访问 BeagleBone
- 板子启动大约一分钟后,直接在浏览器里通过
192.168.7.1(windows)或者192.168.6.2(Linux)可以访问到板卡系统;这是通过Cloud9 IDE方式访问的;而Cloud9左侧的那些文件位于板卡的/var/lib/cloud9路径。(通过设置好像也可以通过VScode访问) - 板子启动后,也可通过
SSH直接连接`192.168.7.2"访问; - 疑问:本来通过
Cloud9可以访问,但是突然就不行了,出现如下界面,这是为啥呢?