电子商务网站开发技术支持站多多 福州网站建设
使用AWR对电路进行交流仿真—以整流器仿真为例
生活不易,喵喵叹气。马上就要上班了,公司的ADS的版权紧缺,主要用的软件都是NI 的AWR,只能趁着现在没事做先学习一下子了,希望不要裁我。
本AWR专栏只是学习的小小记录而已,都会分享工程,参考的书籍是张媛媛老师的AWR射频微波电路设计与仿真教程,我目测是由浅入深非常好的书籍。
工程文件:使用AWR对电路进行交流仿真-以整流器仿真为例-AWR工程文件
目录
- 使用AWR对电路进行交流仿真---以整流器仿真为例
- 1、工程和原理图创建
- 1.1 另存为工程
- 1.2 新建原理图
- 1.3 插入器件
- 2、创建图表和测量项
- 3、设置仿真频率范围
- 4、运行仿真与查看结果
- 5、在AWR中使用Tune(手动调节)
1、工程和原理图创建
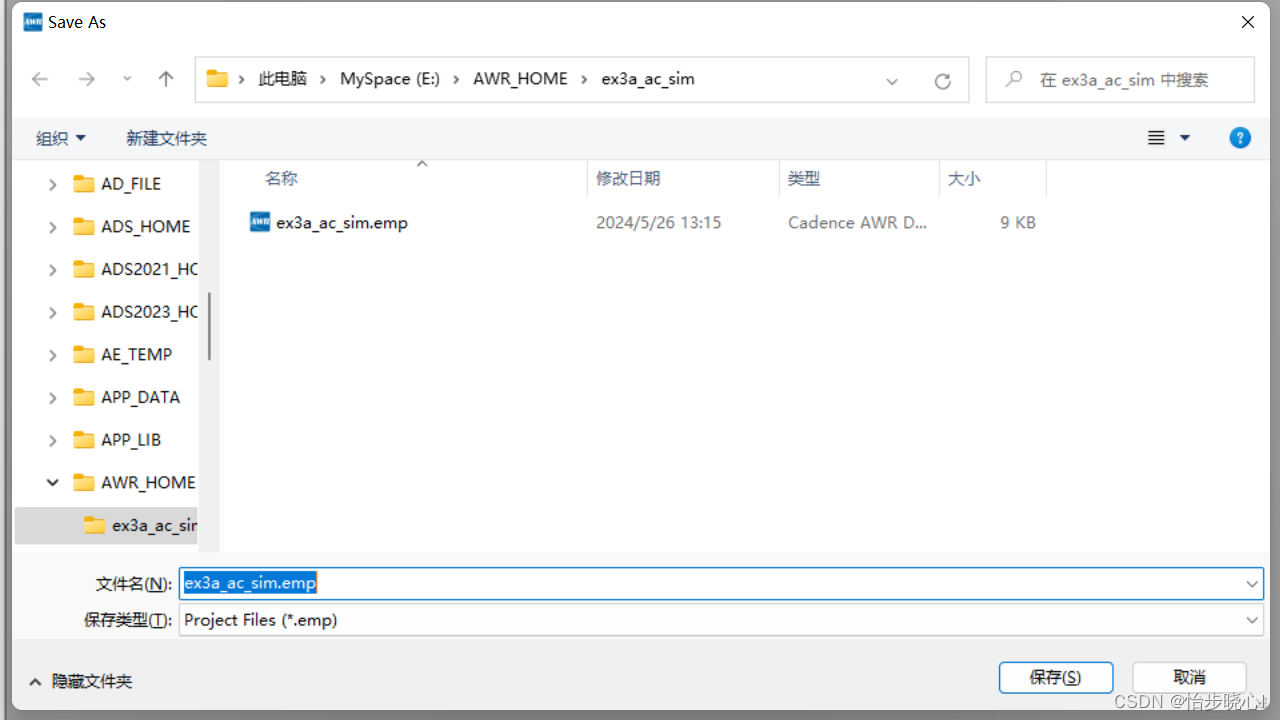
1.1 另存为工程
每次打开AWR都是一个未命名的工程,需要先另存为新的工程并命名(点击File工具栏的Save Project as):
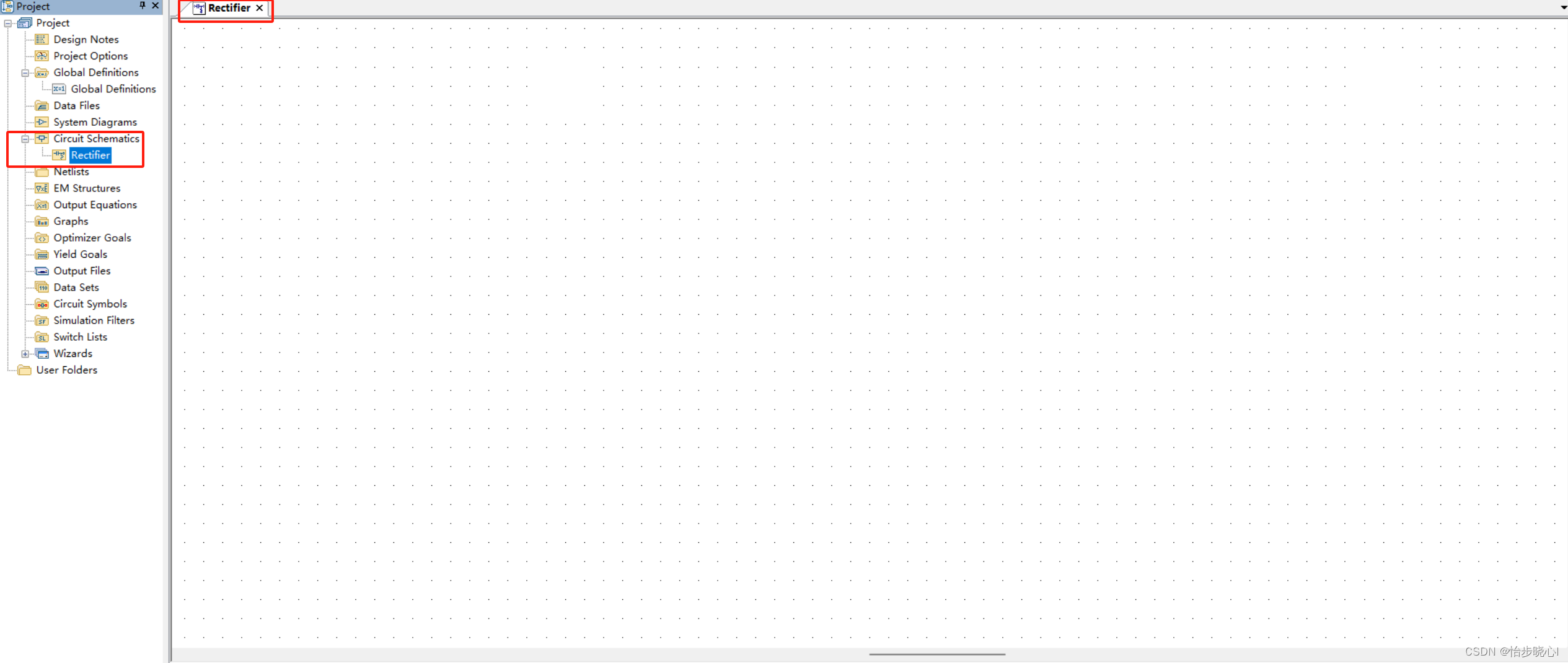
1.2 新建原理图
点击工具栏最上方的project,选择Add Schematic的New Schematic,命名为Rectifier:

创建完成后即可看到原理图界面:
1.3 插入器件
选择界面下方的Elements标签切换到放置器件的界面,随后选择器件的大类,并拖入实际使用的器件:
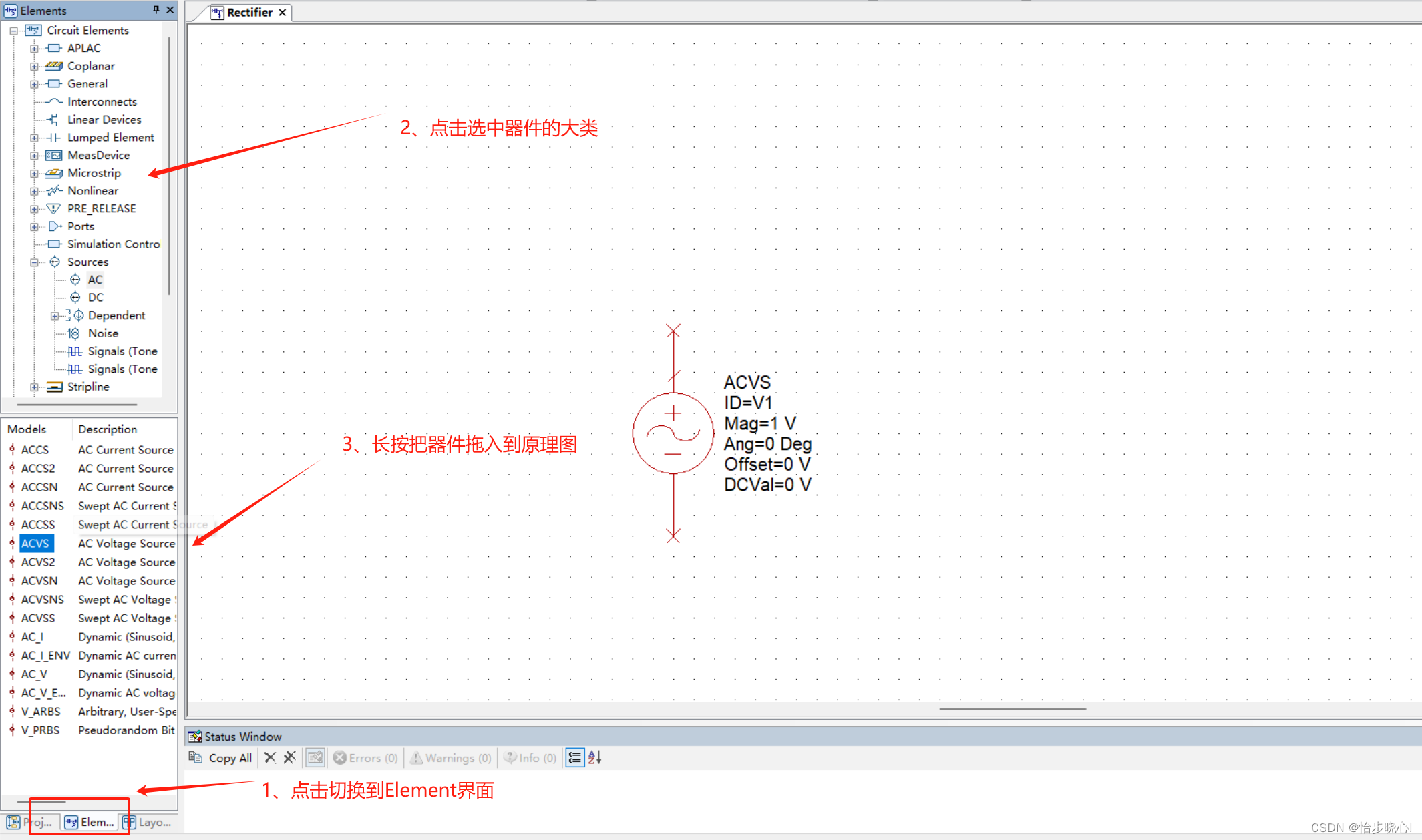
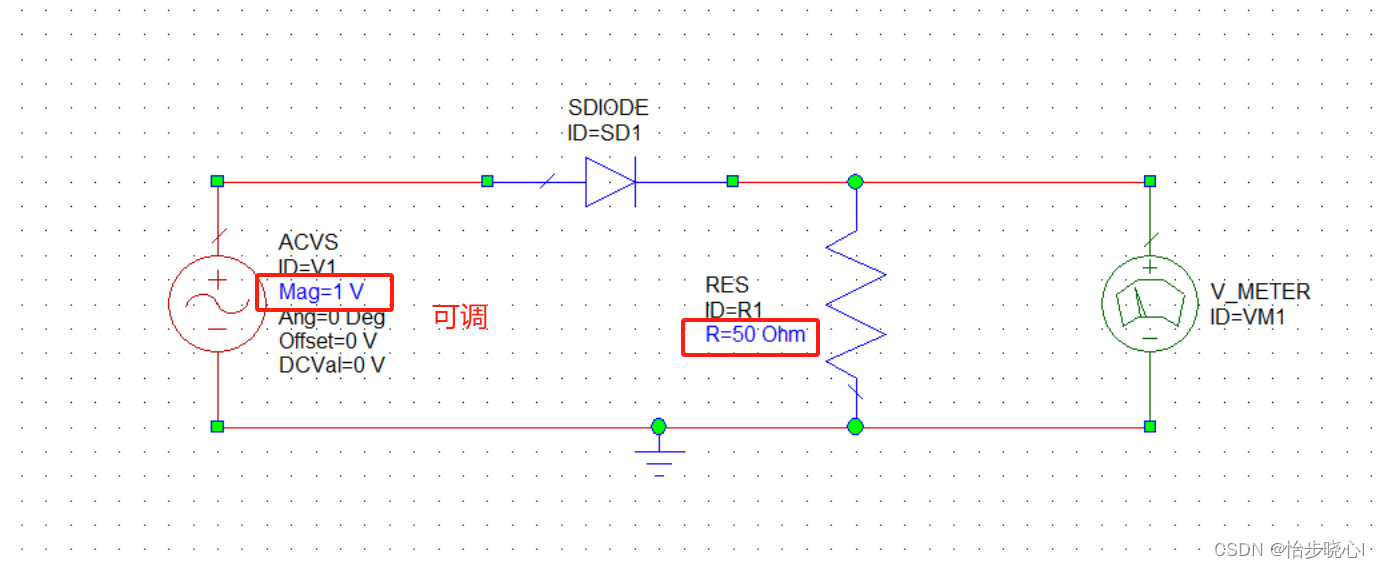
最后插入的器件的原理图如下所示:
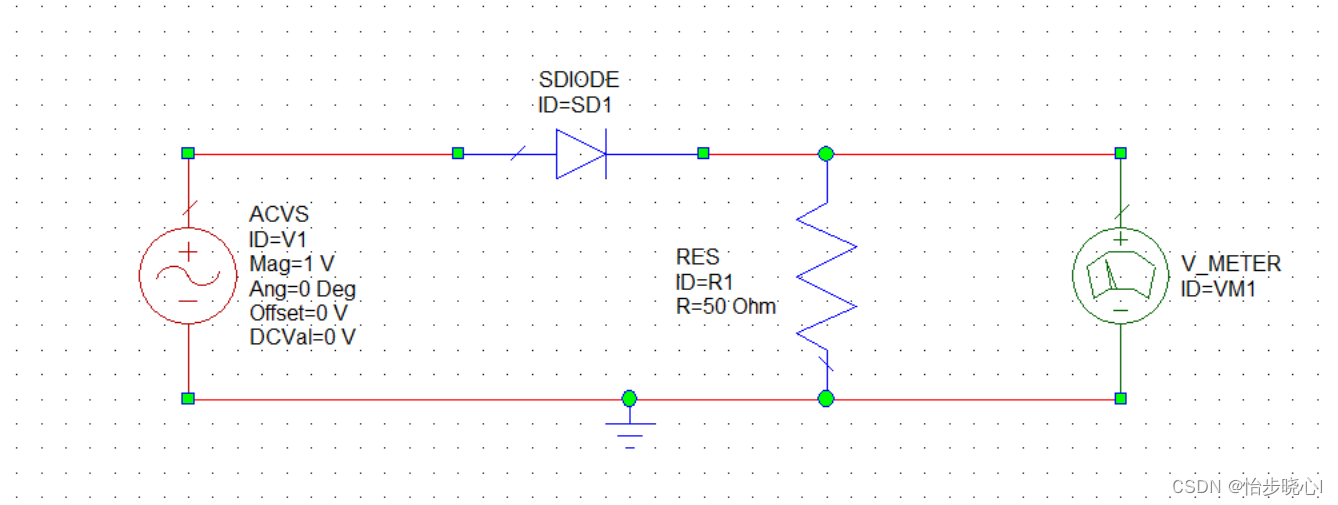
其中的器件和对应位置如下:
| 器件名字 | 对应位置 |
|---|---|
| ACVS电压源 | Source->AC里面 |
| SDIODE二极管 | Nonlinear->Diode里面 |
| RES电阻 | Lumped Element->Resistor |
| V_METER电压表 | MeasDevice |
| GND地 | Interconnects |
2、创建图表和测量项
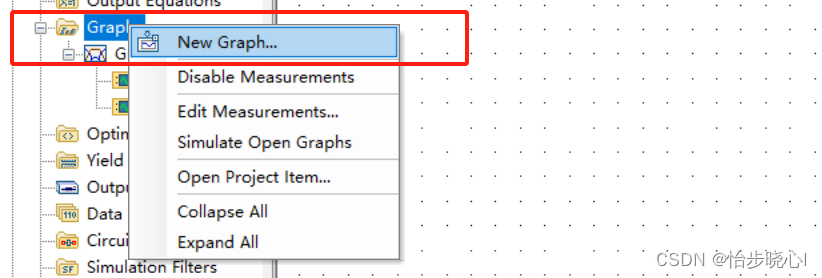
在左侧栏框中右键Graph,并新建图表:
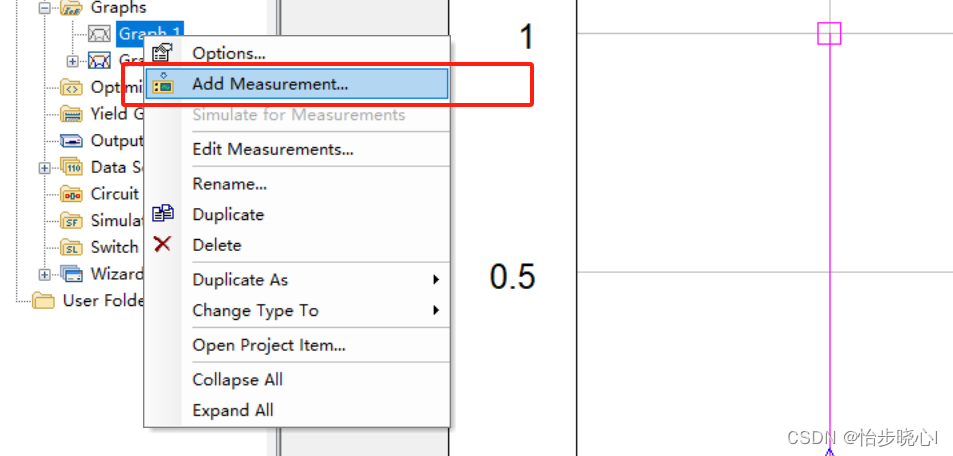
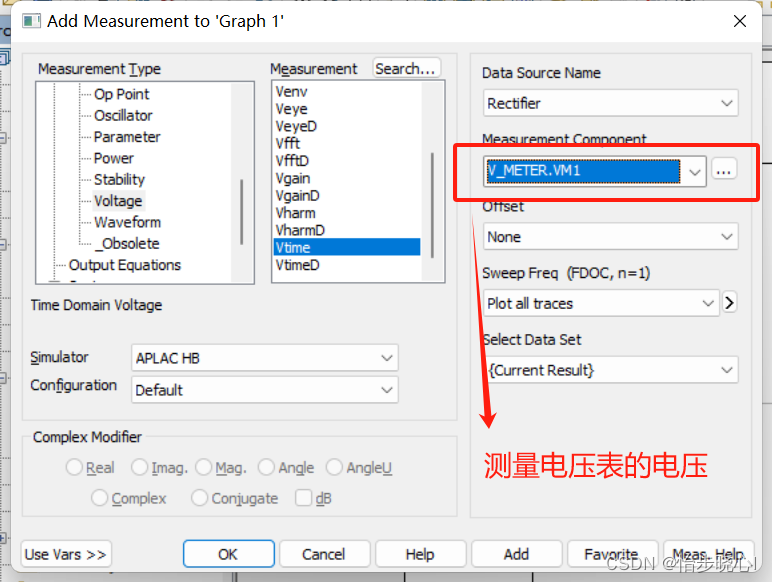
右键刚刚创建的图表,加入测量:
现在先测量时域的波形,查看电流源和设定的电压表的电压波形:
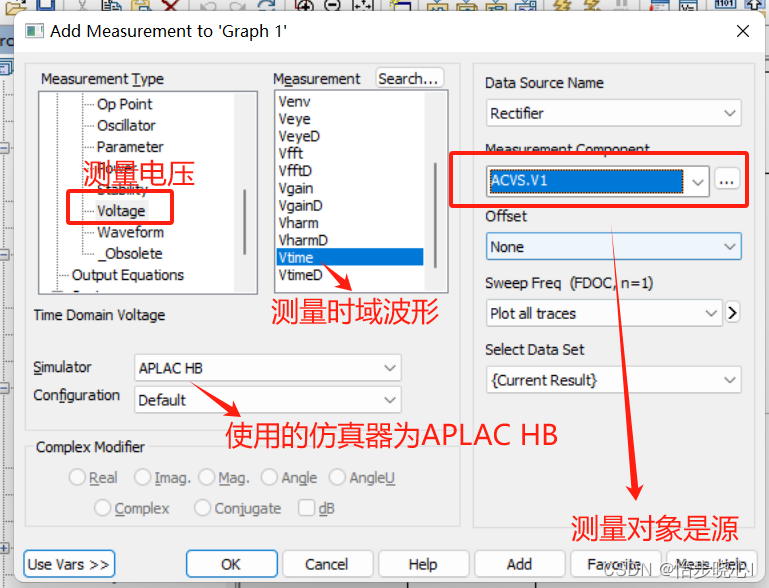
设置完第一个点击Add,再设置第二个就行,第二个设置完也点击Add:
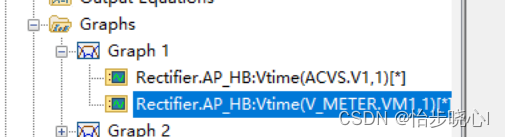
设置完Measument后图表如下:
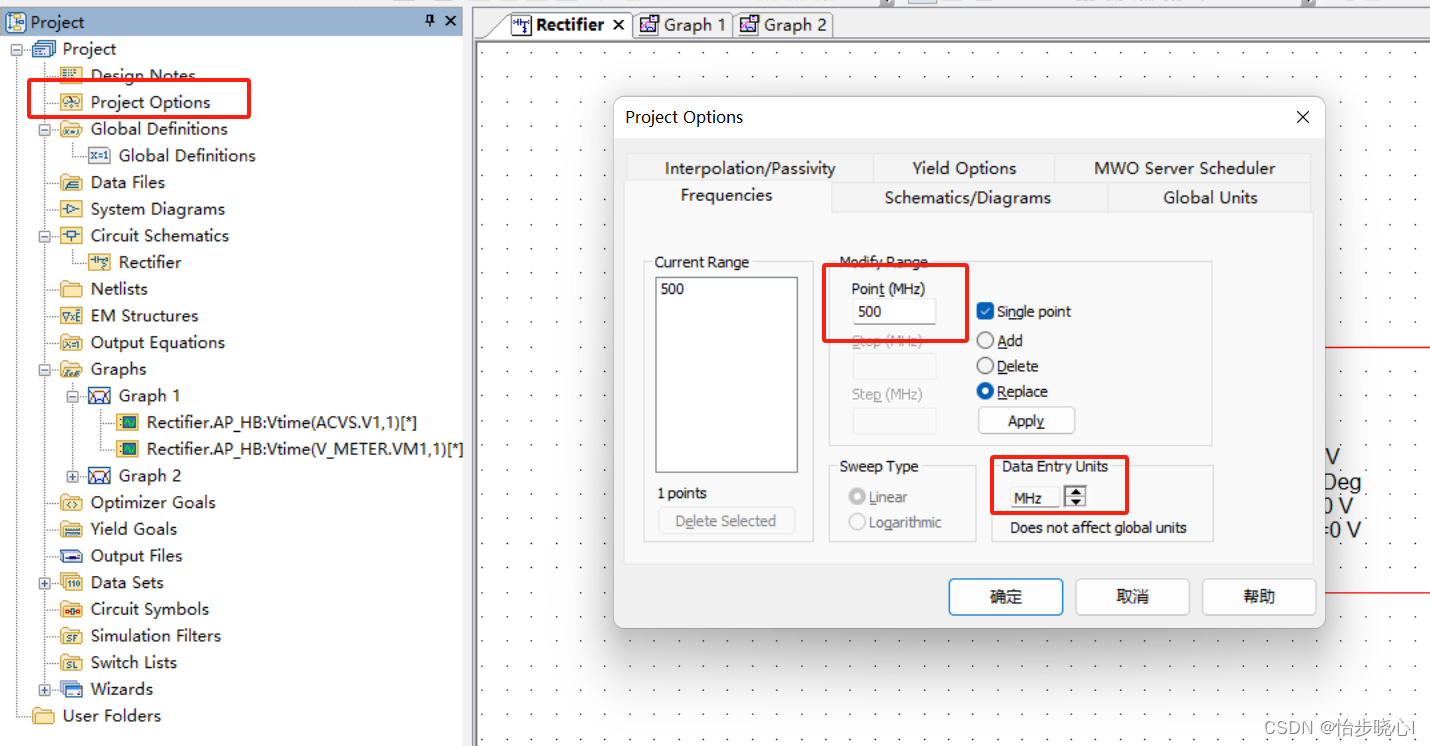
3、设置仿真频率范围
此处假设仿真的频率为500MHz,双击Project Options,设置仿真频率为500MHz即可:
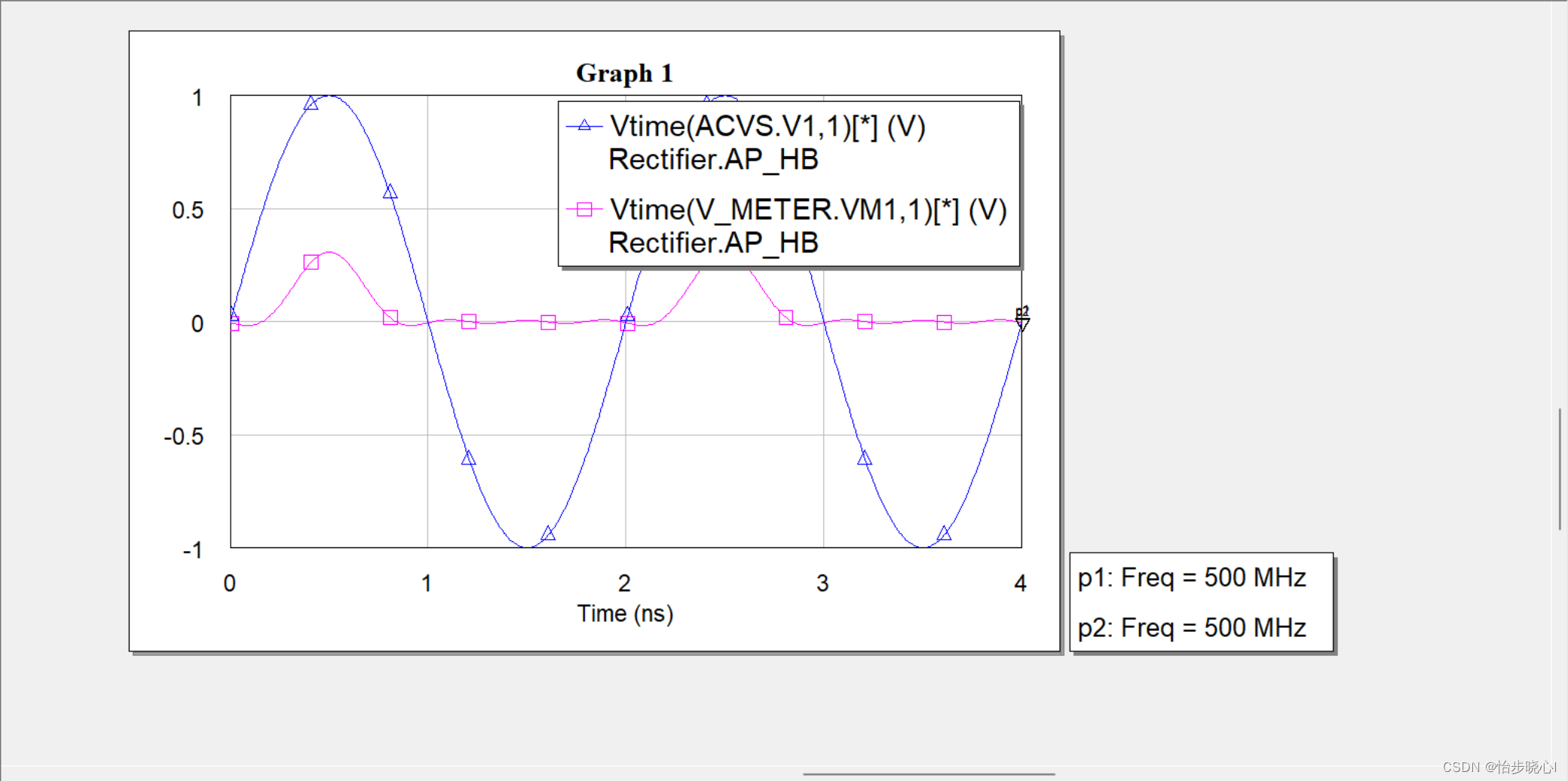
4、运行仿真与查看结果
点击Simulate里面的Analysis即可进行仿真:

仿真后双击刚刚创建的图即可查看结果,可以看到整流效果比较理想,波形从原来的正弦波变成了半正弦波:
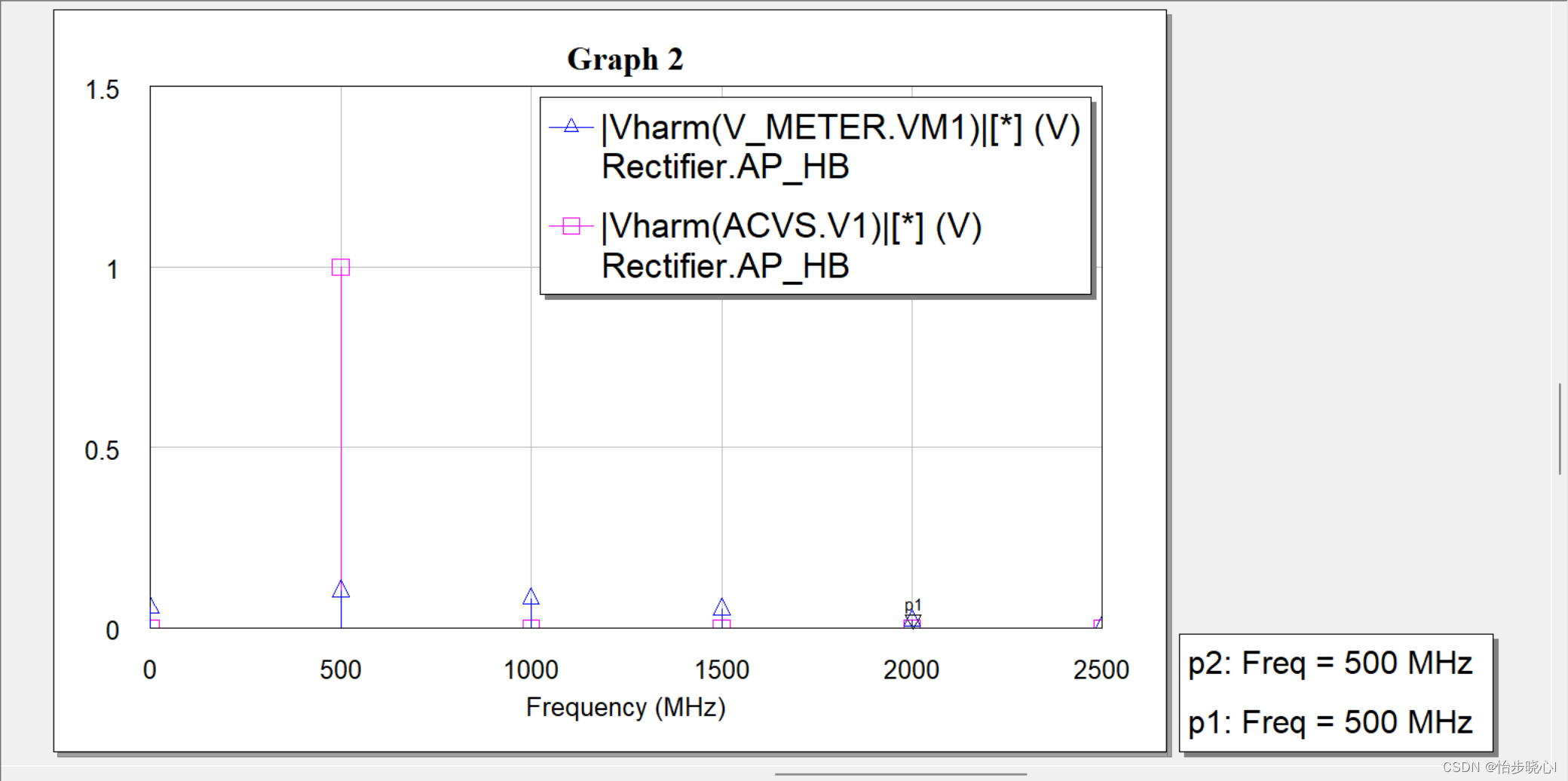
此外,可以添加新图表,查看波形的谐波分量:
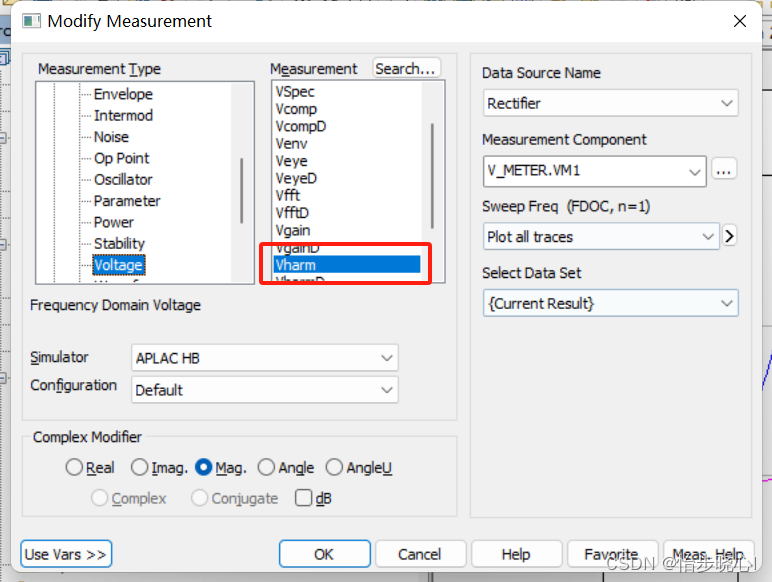
添加后可能需要重新运行仿真,结果如下:
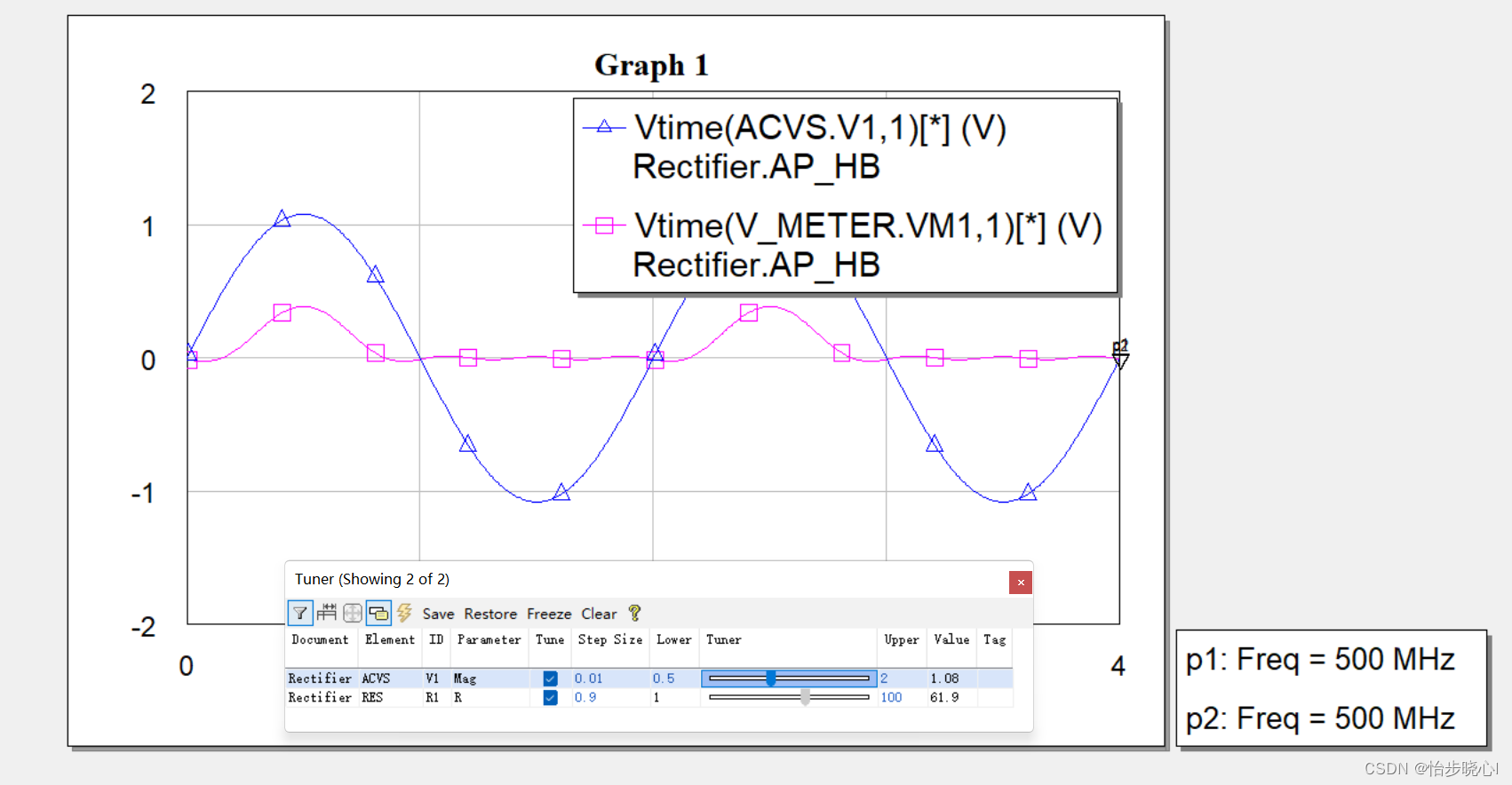
5、在AWR中使用Tune(手动调节)
在Simulate中选择Tune Tool:

移动到原理图的器件参数上,会出现小图标,例如移动到50欧姆上单击一下,50欧姆会变成蓝色,代表参数变为可调的:
此时,在Simulate中选择Tune即可出现滑条:
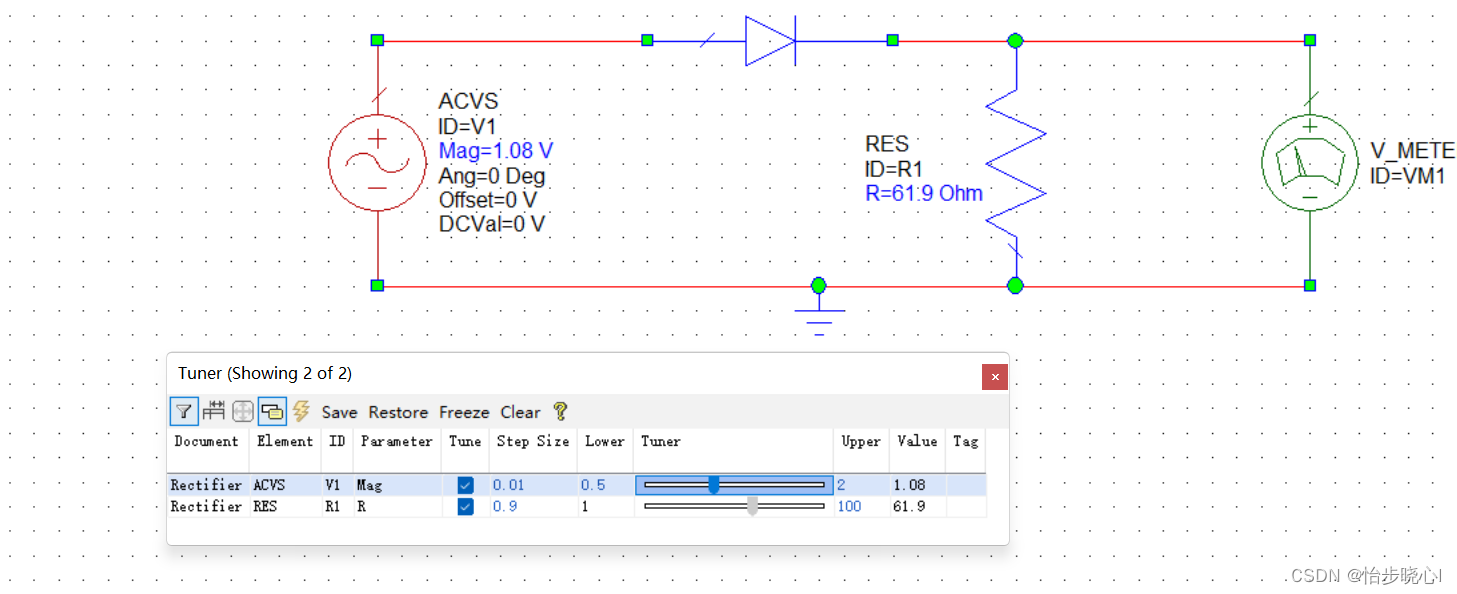
打开Graph界面,滑动滑条,可以看到数据也随之改变: