客户评价 网站建设网站标题栏
目录
android申请权限:
监听用户是否开启权限或关闭权限:
退出app返回桌面:
android申请权限:
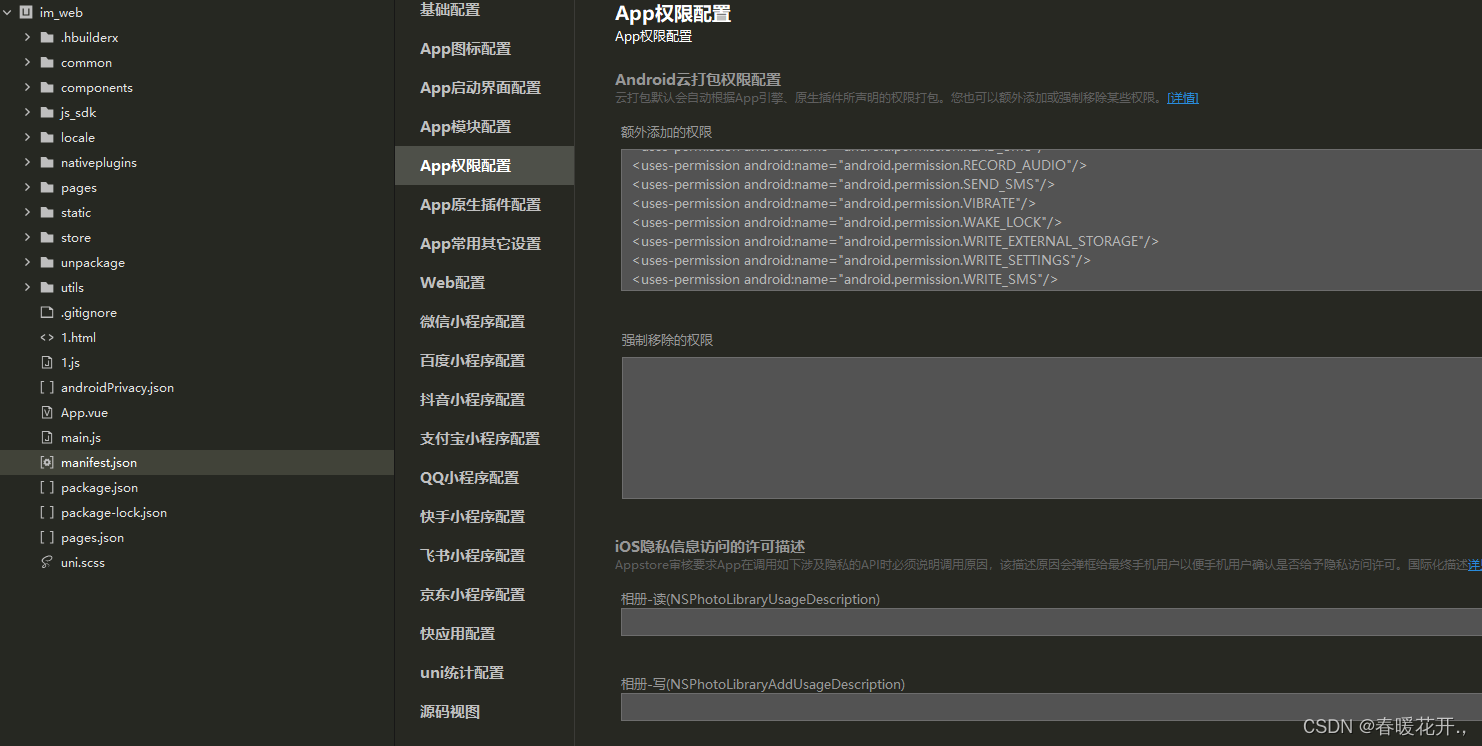
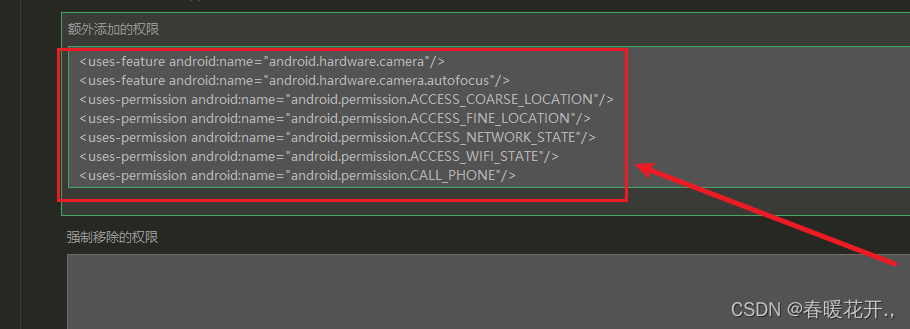
首先在 manifest.json 内添加你所需要用到权限
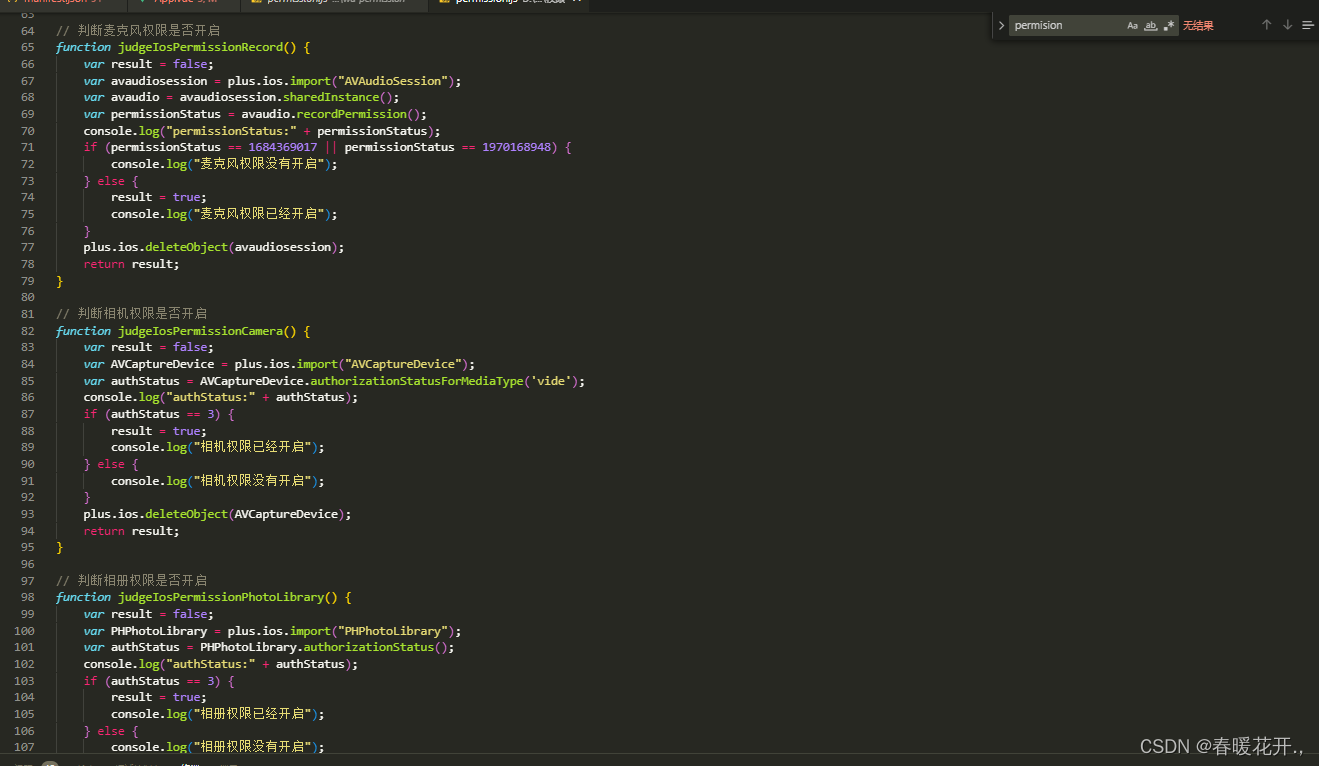
添加权限插件
permission.js · 一次就好1/权限插件 - Gitee.com![]() https://gitee.com/just-once-1/permission-plugin/blob/master/permission.js
https://gitee.com/just-once-1/permission-plugin/blob/master/permission.js
App.vue 内引入该插件
import permision from "你的插件路径"
App.vue onShow 钩子内 使用 permision.requestAndroidPermission 调用申请该权限
permision.requestAndroidPermission("android.permission.RECORD_AUDIO")
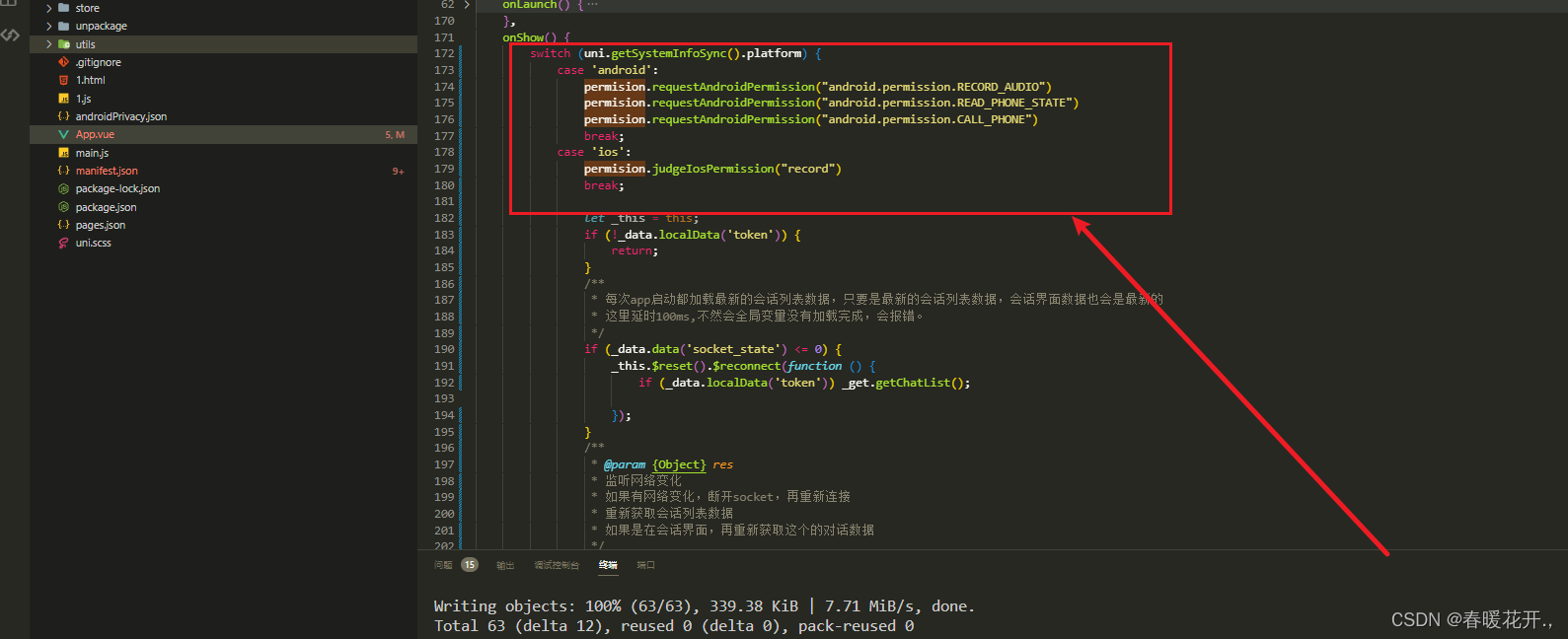
permision.requestAndroidPermission("android.permission.你的权限名") ,
注意你的权限名 必须一致和 manifest.json 内配置的权限名一致
监听用户是否开启权限或关闭权限:
permission.js 权限插件内 requestAndroidPermission 方法可以监听到用户是拒绝权限 还是 关闭权限 还是 永久拒绝权限
function requestAndroidPermission(permissionID) {return new Promise((resolve, reject) => {plus.android.requestPermissions([permissionID], // 理论上支持多个权限同时查询,但实际上本函数封装只处理了一个权限的情况。有需要的可自行扩展封装function (resultObj) {var result = 0;for (var i = 0; i < resultObj.granted.length; i++) {var grantedPermission = resultObj.granted[i];console.log('已获取的权限:' + grantedPermission);result = 1}for (var i = 0; i < resultObj.deniedPresent.length; i++) {var deniedPresentPermission = resultObj.deniedPresent[i];console.log('拒绝本次申请的权限:' + deniedPresentPermission);if (("android.permission.READ_PHONE_STATE" == deniedPresentPermission)) {console.log(`拒绝了电话权限`)plus.runtime.quit()}result = 0}for (var i = 0; i < resultObj.deniedAlways.length; i++) {var deniedAlwaysPermission = resultObj.deniedAlways[i];console.log('永久拒绝申请的权限:' + deniedAlwaysPermission);result = -1}resolve(result);// 若所需权限被拒绝,则打开APP设置界面,可以在APP设置界面打开相应权限// if (result != 1) {// gotoAppPermissionSetting()// }},function (error) {console.log('申请权限错误:' + error.code + " = " + error.message);resolve({code: error.code,message: error.message});});});
}退出app返回桌面:
安卓端退出应用程序:
plus.runtime.quit();苹果端退出应用程序:
const threadClass = plus.ios.importClass("NSThread");const mainThread = plus.ios.invoke(threadClass, "mainThread");plus.ios.invoke(mainThread, "exit");