互动案例的网站菏泽建设局网站
设计链表
在链表类中实现这些功能:
- get(index):获取链表中第 index 个节点的值。如果索引无效,则返回-1。
- addAtHead(val):在链表的第一个元素之前添加一个值为 val 的节点。插入后,新节点将成为链表的第一个节点。
- addAtTail(val):将值为 val 的节点追加到链表的最后一个元素。
- addAtIndex(index,val):在链表中的第 index 个节点之前添加值为 val 的节点。如果 index 等于链表的长度,则该节点将附加到链表的末尾。如果 index 大于链表长度,则不会插入节点。如果index小于0,则在头部插入节点。
- deleteAtIndex(index):如果索引 index 有效,则删除链表中的第 index 个节点。
思路
这道题目,我觉得是链表部分最好的练习链表操作的一道题目,虽然不一定是考的频率最高的。为什么这么说?
- 删除元素
- 新增元素
- 查询元素
上述对链表的操作都已经涉及。
类中的属性
根据题目第4点要求,我们可以知道,这个自定义链表中一定有个 size 属性,记录当前链表的长度。(不然你怎么判断index?)
根据上一篇文章移除链表元素我们可以知道,这里需要一个虚拟头结点来处理删除操作。
各个方法的代码
分析一下 addAtHead() 和 addAtTail()可以合并到 addAtIndex()方法中
大概就是:
addAtHead(val) == addAtIndex(0,val)
addAtTail(val) == addAtIndex(size,val)
所以,我们真正需要写的方法只有 get(index)、deleteAtIndex(index)、 addAtIndex(index,val)三个方法。我们先从难的开始
addAtIndex(index,val)
先不考虑头尾这两个特例。
正常插入
我们先想一下在正常结点中插入数据
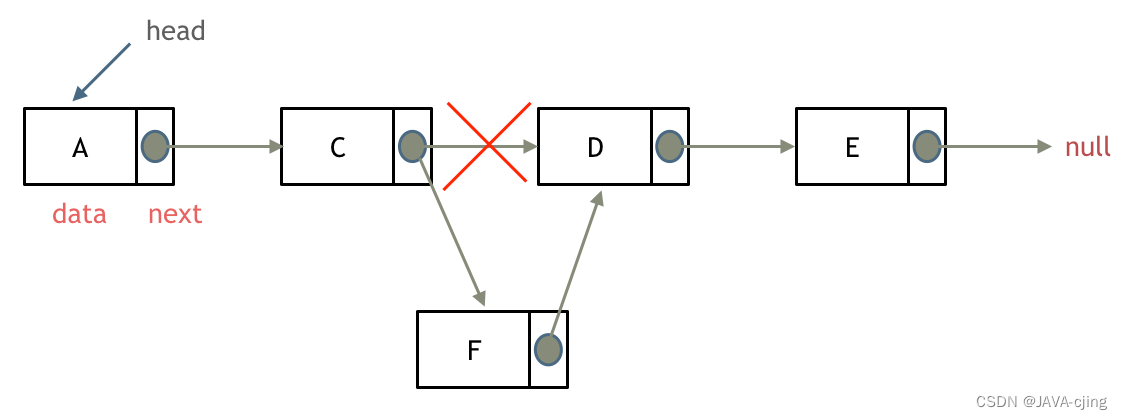
- 找到需要插入的前驱节点(注意一定要是前驱节点)也就是上图中C.
- new 一个新节点
- newNode的next -> 前驱节点的next
- 前驱节点的next -> newNode
- size++
插入头(head)
我们这里使用的虚拟节点,采用上述方法可以直接插入
插入尾(tail)
仔细一想,好像也可以,没问题。
相关代码:
public void addAtIndex(int index,int val) {if (index > size) {return;} else if (index <= 0) {index = 0;}ListNode newLinedList = new ListNode(val);ListNode preNode = head;for (int i = 0; i < index; i++) {preNode = preNode.next;}//这一步很重要,顺序不能反。//一定是新节点先指向下一个,然后再断开前驱节点的nextnewLinedList.next = preNode.next;preNode.next = newLinedList;size++;}
话说回来,因为我们是用size+ 虚拟头节点,所以插入头、尾只是size的值不同,所以不会有什么特殊处理的地方。删除操作也是一样。
deleteAtIndex(index)
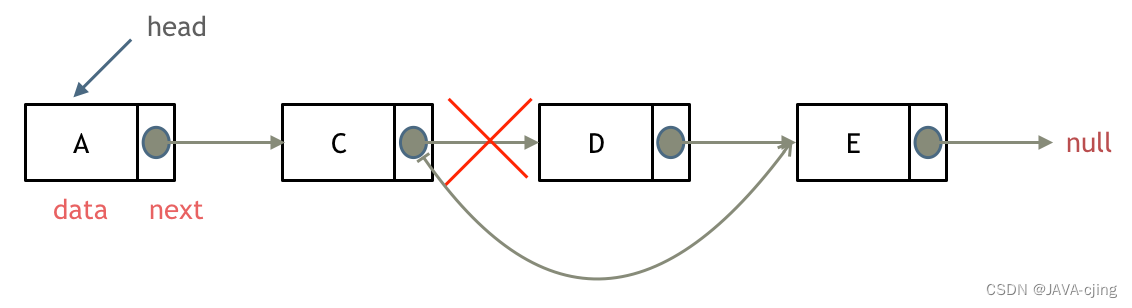
遍历到需要删除的节点的前驱节点(黑人问号脸?又是前驱节点?大家可以想一下,为什么不管是新增还是删除都需要前驱节点)
删除很简单 :伪代码: preNode.next = preNode.next.next
实际代码:
public void deleteAtIndex(int index) {if (index < 0 || index >= size) {return;}ListNode dummyHead = head;for (int i = 0; i < index; i++) {dummyHead = dummyHead.next;}//删除节点dummyHead.next = dummyHead.next.next;size--;}
get(index)
get其实和删除差不多,但是唯一需要注意的是,我们是虚拟头结点,所以在遍历获取到的节点是前驱节点,返回的是 preNode.next.val
代码:
public int get(int index) {//这里需要带等号if (index < 0 || index >= size) {return -1;}ListNode dummyHead = head;for (int i = 0; i < index; i++) {dummyHead = dummyHead.next;}//注意是虚拟头结点,所以需要返回next.valreturn dummyHead.next.val;}
代码
public class MyLinkedList {/*** 虚拟头结点*/ListNode head;int size;MyLinkedList() {size = 0;head = new ListNode(0);}public void addAtIndex(int index, int val) {if (index > size) {return;} else if (index <= 0) {index = 0;}ListNode newLinedList = new ListNode(val);ListNode preNode = head;for (int i = 0; i < index; i++) {preNode = preNode.next;}//这一步很重要,顺序不能反。//一定是新节点先指向下一个,然后再断开前驱节点的nextnewLinedList.next = preNode.next;preNode.next = newLinedList;size++;}public int get(int index) {//这里需要带等号if (index < 0 || index >= size) {return -1;}ListNode dummyHead = head;for (int i = 0; i < index; i++) {dummyHead = dummyHead.next;}//注意是虚拟头结点,所以需要返回next.valreturn dummyHead.next.val;}public void deleteAtIndex(int index) {if (index < 0 || index >= size) {return;}ListNode dummyHead = head;for (int i = 0; i < index; i++) {dummyHead = dummyHead.next;}//删除节点dummyHead.next = dummyHead.next.next;size--;}public void addAtHead(int val) {addAtIndex(0, val);}public void addAtTail(int val) {addAtIndex(size, val);}}
总结
- 利用虚拟节点处理 删除、更新操作。
- 注意get方法获取的返回的值应该是:
preNode.next.val。 - 新增节点的时候,注意下代码顺序。