哪个网站可做密丸网站保护等级是企业必须做的么
目录
- 1、前言
- 2、设计思路和框架
- 3、vivado工程详解
- 4、上板调试验证并演示
- 5、福利:工程代码的获取
1、前言
FPGA实现SDI视频编解码目前有两种方案:
一是使用专用编解码芯片,比如典型的接收器GS2971,发送器GS2972,优点是简单,比如GS2971接收器直接将SDI解码为并行的YCRCB,GS2972发送器直接将并行的YCRCB编码为SDI视频,缺点是成本较高,可以百度一下GS2971和GS2972的价格;
另一种方案是使用FPGA实现编解码,利用FPGA的GTP/GTX资源实现解串,优点是合理利用了FPGA资源,GTP/GTX资源不用白不用,缺点是操作难度大一些,对FPGA水平要求较高。
本设计直接另辟蹊径,创新性地使用GTX的SFP接口,使用光纤传输SDI视频实现收发,全网首创,具有重要意义。。。以上内容纯属娱乐。。。
本文详细描述了FPGA使用GTX实现SFP光纤收发SDI视频的实现设计方案,工程代码编译通过后上板调试验证,文章末尾有演示视频,可直接项目移植,适用于在校学生、研究生项目开发,也适用于在职工程师做项目开发,可应用于医疗、军工等行业的数字成像和图像传输领域;
提供完整的、跑通的工程源码和技术支持;
工程源码和技术支持的获取方式放在了文章末尾,请耐心看到最后;
2、设计思路和框架
设计思路和框架如下:
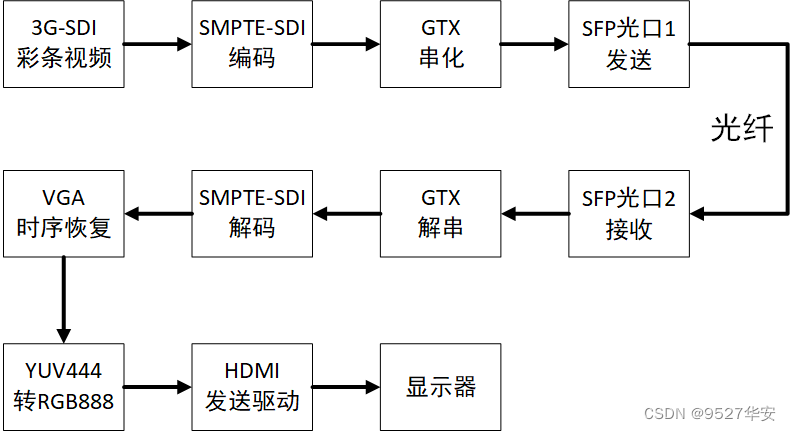
视频输入:
FPGA内部生成3G-SDI彩条视频;
SDI视频编码:
使用Xilinx SMPTE-SDI IP实现SDI视频编码;
GTX串化:
直接使用Xilinx源语实现SDI视频数据并串转换;
SFP光口环回:
使用SFP光纤线缆对接两个SFP光实现环回连接;
GTX解串:
直接使用Xilinx源语实现SDI视频数据串并转换;
SDI视频解码:
使用Xilinx SMPTE-SDI IP实现SDI视频解码;
VGA时序恢复:
此模块的作用就是解码恢复出hs、vs以及de信号,即恢复正常的VGA视频时序;
颜色转换:
YUV444转RGB888,很简单,几条公式的事儿,不多讲;
HDMI发送驱动:
纯verilog代码实现,可以参考我之前写的文章点击查看:HDMI
这里的设计思路和原理讲得很简单,是因为我之前写过一篇文章,详细讲解了SDI的编解码,可以参考我之前写的文章点击查看:SDI解码
点击查看:SDI发送
3、vivado工程详解
开发板:Xilinx Kintex7开发板;
开发环境:Vivado2019.1;
输入:FPGA内部生成彩条,分辨率1080p@30帧;
输出:HDMI,分辨率1080p@30帧;
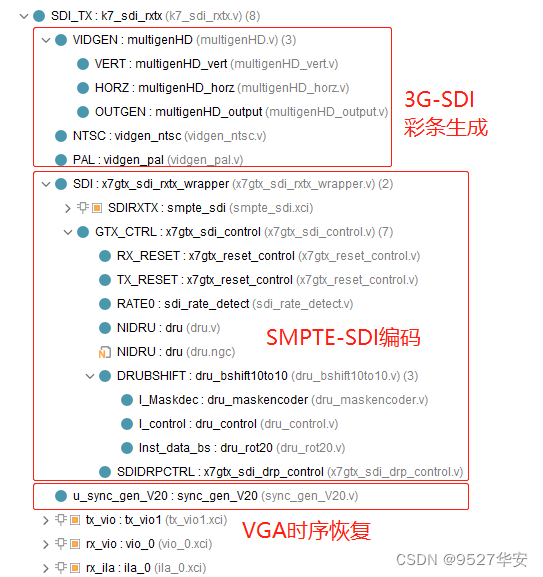
工程代码架构如下:
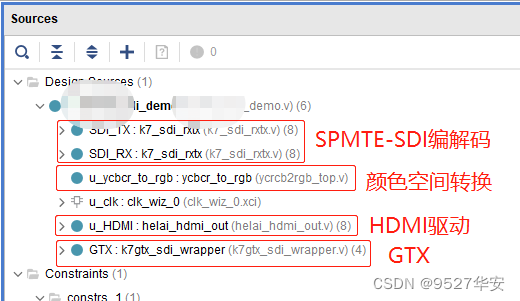
SDI编码部分代码如下:
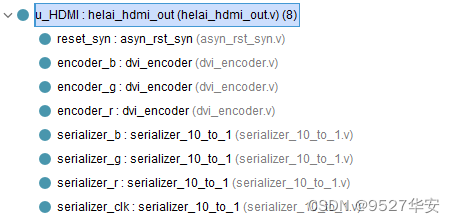
HDMI输出驱动代码如下:
GTX代码如下:
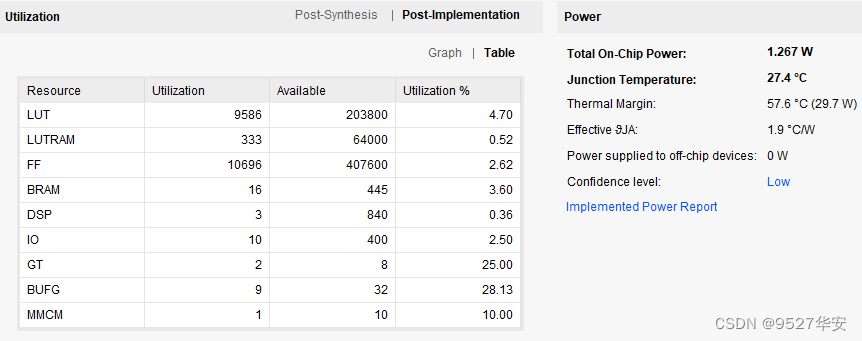
资源消耗和功耗预估如下:
4、上板调试验证并演示
板子连接如下:

演示视频如下:
FPGA使用GTX实现SFP光纤收发SDI视频
5、福利:工程代码的获取
福利:工程代码的获取
代码太大,无法邮箱发送,以某度网盘链接方式发送,
资料获取方式:私,或者文章末尾的V名片。
网盘资料如下:
