如何做好一个网站佛山专业的免费建站
在threadx移植中,系统的systick通过了宏定义的方式定义,很难对接库函数的时钟频率,不太利于进行维护
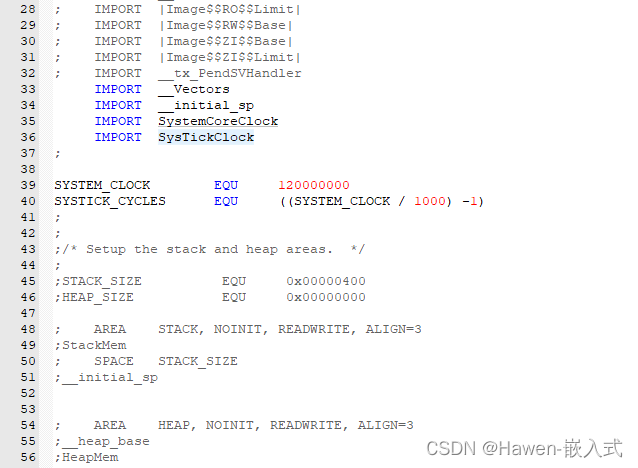
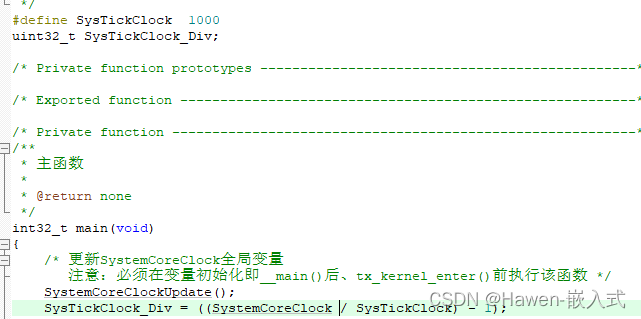
所以在C文件中自己定义了一个systick_Div的变量,通过宏定义方式设定systick的时钟频率
在汇编下要加载这个systick分频系数
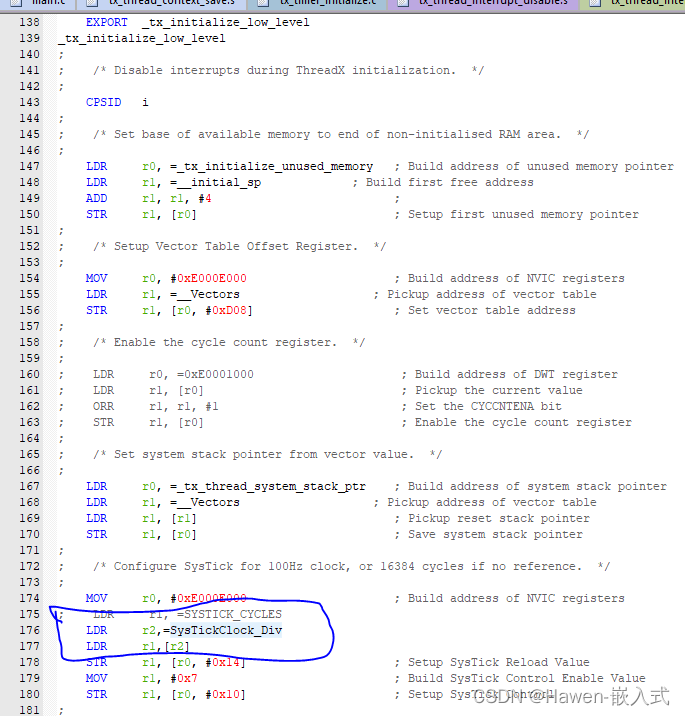
方法:
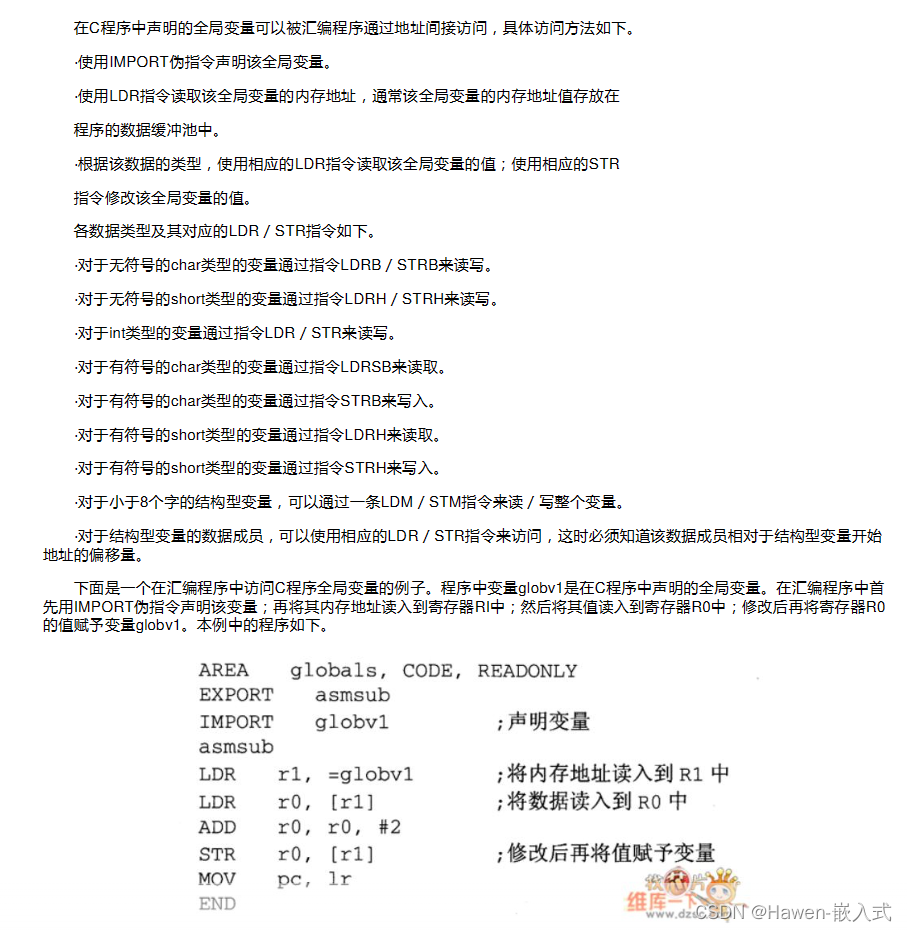
总结:对汇编指令需要进一步熟悉。
在threadx移植中,系统的systick通过了宏定义的方式定义,很难对接库函数的时钟频率,不太利于进行维护
所以在C文件中自己定义了一个systick_Div的变量,通过宏定义方式设定systick的时钟频率
在汇编下要加载这个systick分频系数
方法:
总结:对汇编指令需要进一步熟悉。