深圳网站建设延安ps如何做网站横幅
我们的生活中已经充满了数据,各种岗位例如运营、市场、营销上也都喜欢在职位要求加上一条利用数据、亦或是懂得数据分析。事实上,数据已经成为了构建现代社会的基本生产要素,并且因为不受自然环境的限制,已经成为了人们对未来社会发展方向的共识。今天的干货分享,干到流鼻血,记得收藏哦!
数据治理
用主流的定义来说,数据治理(Data Governance)是组织中涉及数据使用的一整套管理行为。由企业数据治理部门发起并推行,关于如何制定和实施针对整个企业内部数据的商业应用和技术管理的一系列政策和流程。
 数据治理 – 派可数据商业智能BI可视化分析平台
数据治理 – 派可数据商业智能BI可视化分析平台
从这个定义就可以看出,为什么总说数据治理多么多么重要,一提到数据治理就是各种脏活累活,搞好了看不到,搞不好却容易背锅。“发起并推行”“制定和实施”“整个企业”“一系列政策和流程”这些词工作久了一听就觉得头疼,更别提还单独成立了数据治理部门,如果没有高层领导的全力支持以及整个企业的配合,那数据治理成功的概率可想而知。
不过哪怕如此困难,越来越多的企业伴随着信息化、数字化的推行,都开始了数据治理的推进。只要数据资产还能够为企业提供价值,数据治理就是非常必要的,它是企业实现数据战略的基础,更是一个整个管理体系,包括文化、组织、制度、流程、工具在内的系统性工程。
 数据治理 – 派可数据商业智能BI可视化分析平台
数据治理 – 派可数据商业智能BI可视化分析平台
所以数据治理的目标除了我们之前一直强调的要有数据,要有高质量可用的数据之外,还应该考虑到数据要怎样才能更好地利用,才能在数据治理完成之后,实现数据资产的价值化。
数据孤岛
企业在尚未进行信息化建设或信息化建设处于初级阶段,一般会在使用数据时发现一个广泛存在的问题,数据孤岛。数据孤岛是个很现实的问题,企业发展需要各个业务部门的通力协作,而数据孤岛导致了企业不同业务部门数据不能互通,业务交流受到阻碍。

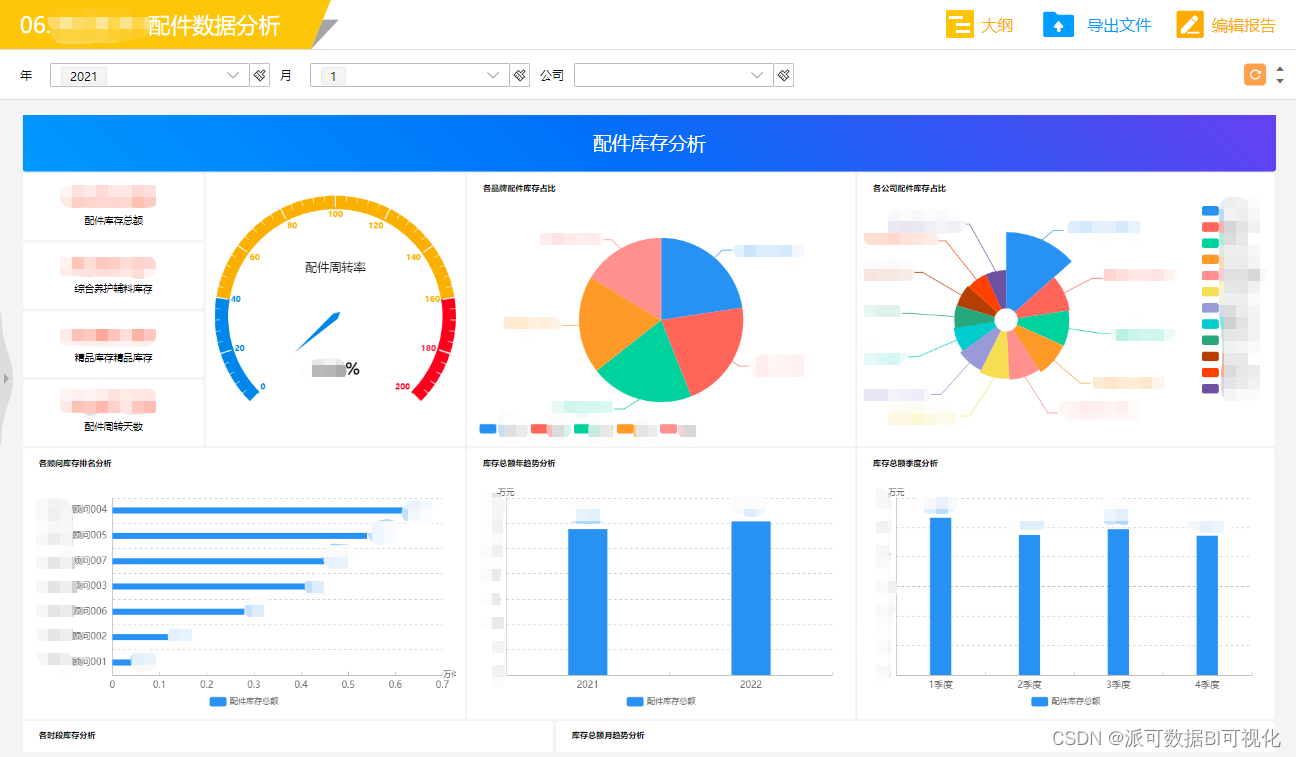
数据可视化 - 派可数据商业智能BI可视化分析平台
除了业务层面,技术和管理人员在调取数据,查看企业业务发展数据时,只能重复对各部门系统数据库一一操作,不仅容易出现错误、遗漏等情况,还可能对数据分析、可视化分析信息造成错误影响,导致管理人员对业务发展情况进行误判,做出错误决策。
连接互通
从某种层面上来说,数字化转型其实也有种“万物互联”的强调。首先,数字化转型要求企业进行信息化建设,通过为各部门、业务线安装对应的业务系统来优化业务流程,实现线下到线上的转换。当然也可以换一种说法,那就是线下和线上的连接互通,为什么这么说?数字化企业通过在线上远程处理事务,但影响到的是线下的实体,这两者并不是对立,而是实现了连接互通。不需要像以前在线下跑来跑去完成各种业务,只需要在网络平台等就可以简单实现。
 数据可视化 - 派可数据商业智能BI可视化分析平台
数据可视化 - 派可数据商业智能BI可视化分析平台
其次,数字化转型还会要求企业内外部实现连接互通。内部来说,企业通过数字化转型可以将不同部门的业务系统进行连接,实现业务数据的互通,让企业能够打破数据孤岛,更高效更全面的利用数据;外部的话,企业在数字化转型中,可以和产业链协同建立完善的生态,通过数据平台、大数据平台等连接上下游的合作企业,实现数据的互通。所以数字化转型也能够实现产业链的连接互通,以生态的形式协同发展。
数据仓库
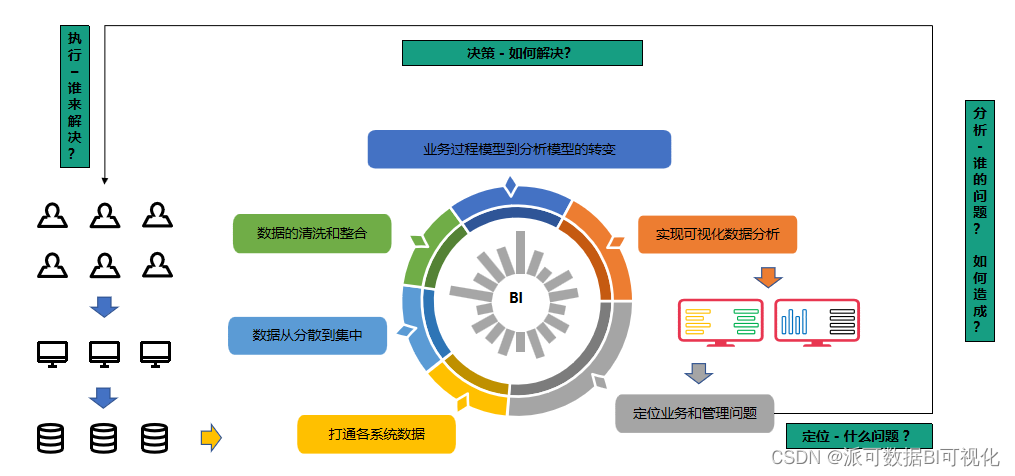
数据仓库是一个面向主题的、集成的、随时间变化但信息本身相对稳定的数据集合,用于支持管理决策过程。其本质就是完成从面向业务过程数据的组织管理到面向业务分析数据的组织和管理的转变过程,也是商业智能BI中数据仓库的主要作用。
 数据仓库 - 派可数据商业智能BI可视化分析平台
数据仓库 - 派可数据商业智能BI可视化分析平台
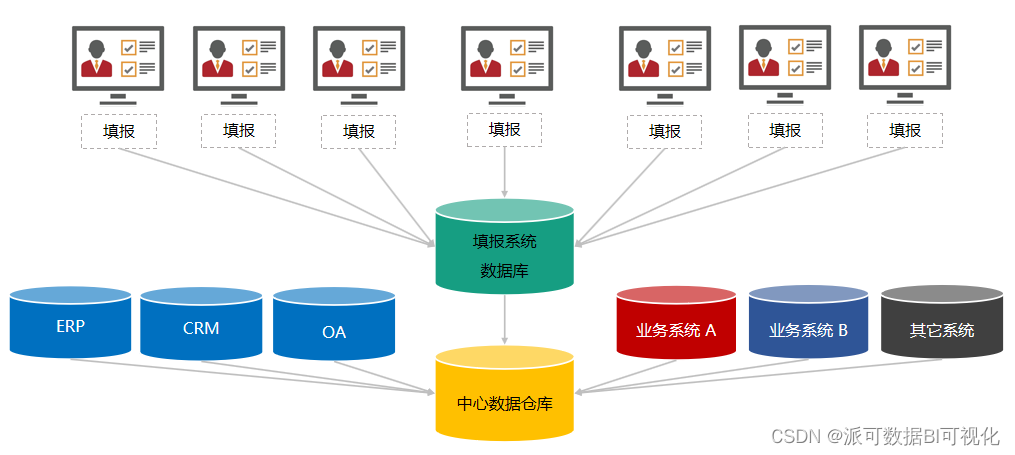
数据仓库就像企业的总的大仓库,能够存储不同来源、不同格式的数据,并且可以通过ETL和数据模型,对数据进行高质量的筛选,分级分类进行存储。具有很强的稳定性,不会频繁的进行增删改等操作,能够反应历史变化。
用通俗的话来说就是数据仓库就像一个终端的大仓库,其他小仓库的各种货品会通过各种方式统一存储到这里,然后通过仓库位置的划分、货品的摆放进行归纳分类,实现规范、标准的从存放,到分类,再到使用的完整过程。