湘潭网站推广爱企查企业信息查询

11月11日,2023中国汽车供应链峰会暨第八届铃轩奖颁奖典礼在江苏省昆山市举行。怿星科技凭借eStation产品,荣获2023铃轩奖“前瞻·智能座舱类·优秀奖”,怿星CEO潘凯受邀出席铃轩奖晚会并代表领奖。
2023铃轩奖“前瞻·智能座舱类·优秀奖”

铃轩奖,即中国汽车零部件年度贡献奖。自2016年创立以来,一直担负着发掘领先新技术、新产品的任务,更成为主流汽车厂商重要供应链选择的考量标准。2023年铃轩奖评选期间,共收到195个零部件新产品/新技术申报案例,其中,前瞻类案例共计119个。60余位来自中国主流车企采购、研发负责人和业内资深专家共同组成强大的铃轩奖评审团,对申报案例进行审查。
经过多轮评选,怿星科技eStation产品从一众前瞻案例中脱颖而出,荣获2023铃轩奖优秀奖。这也是继2022年怿星科技凭借“OTA车云一体全链路仿真测试平台”获奖后,再次获得此殊荣,充分证明了中国汽车供应链专家团队以及业内人士对怿星产品的高度认可。
本次获奖的怿星eStation产品,是一款以智能座舱HMI开发需求为中心,衍生覆盖需求、架构、模块、信号、代码生成、测试管理、集成发布、质量交付的全流程开发管理套件,能同时满足用户对仪表、中控、HUD、副驾、手机app的开发需求。
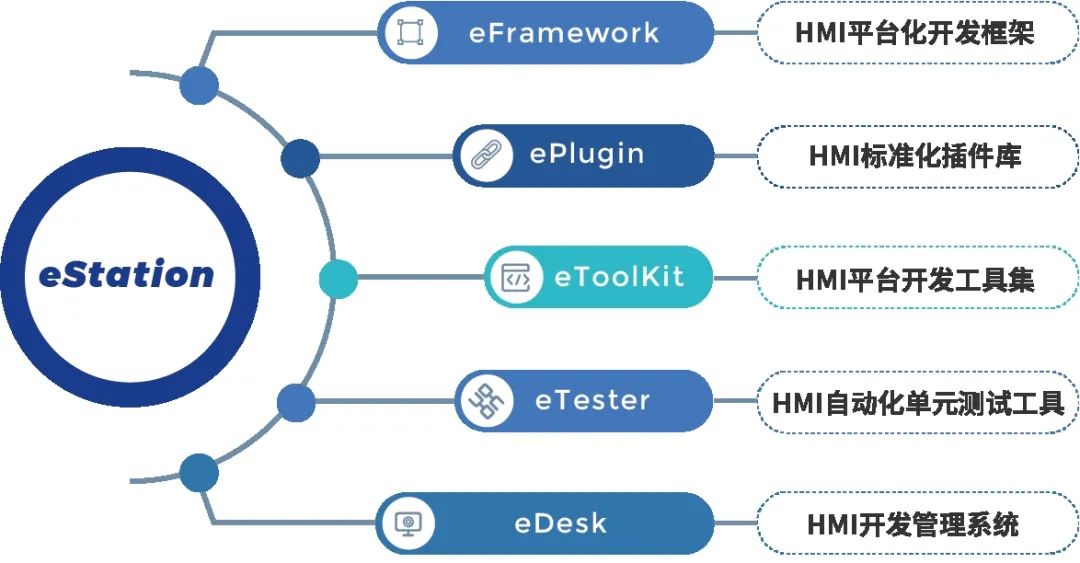
eStation产品构成
eStation搭载了怿星eFramework核心软件开发框架,配合eTester等自动化单元测试工具,能兼容不同引擎、不同Tier1数据,真正实现“软硬解耦”、“软件+设计”全自动开发,帮助客户实现高效可控、全流程、标准化的软件开发,提高软件开发效能,节约人力及成本。
创新驱动
随着汽车新四化的不断发展,智能网联汽车逐步步入深水区,整个汽车产业链也在不断被重构。如何打通车零之间的壁垒,降低合作成本,形成真正共生共赢的良性生态环境,是汽车行业的共识,也是本次汽车供应链峰会的热议话题。怿星科技作为一家智能汽车研发工具链和嵌入式软件产品提供商,多年来一直深耕汽车领域,依托丰富的行业资源、纵向整合能力、高效地响应速度以及垂直管理能力,研发出了一系列质优价美的软硬件工具产品,涵盖整车通用基础软件、座舱基础软件、仿真测试软/硬件、座舱研发软件工具、网络/功能自动化测试产品等,能有效帮助主机厂实现敏捷开发,缩短研发周期,节约成本,提升整车电子及软件开发效率。
未来,怿星还将持续发力汽车研发工具链和软件产品,通过融合前沿科技及自主创新,不断向业内输送具有竞争力的优质产品,推进行业产品革新换代,助力打造多元协同、融合互通的中国汽车生态链。