大连地区建设网站张梅 合肥网站建设
项目时间:
情况一:项目时间开始到上线的时间,这个时间一般比较长(一年,二年,三年)
情况二:项目的版本的时间或则是周期(1个月,2个月,3个月,半年,一年)我们讲的按这个说法;
新项目, 一般时间长,
迭代项目,一般时间短,
—我们经常讲的就是1个月,2个月,3个月,半年
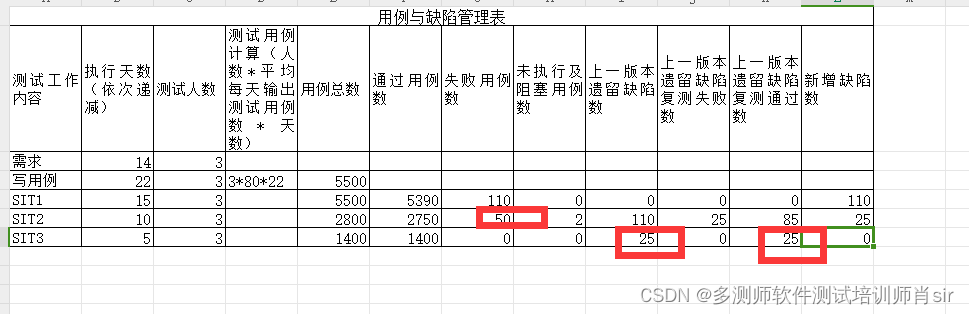
一个月的版本:22天(不算法定节假日和双休)
人力:2个,3个
项目sit测试有3轮
=================================
按照模型H划分:(分成三等份)
第一阶段:分析需求(三分之一少一点) 6天
第二阶段:写测试用例(三分之一) 7天
第三阶段:执行阶段(三分之一多一点) 9天
包含sit 1 sit2 sit3
==============================================
执行阶段9天(分为三次sit测试)呈递减的模式(一半的一半的一半)
sit1测试:5 (全量)
sit2测试:3 (部分)
sit3测试:1 (少量)
例如:(1)10 (6 3 1 ) (2)30 (17 9 4)
===========================================
人员数据:
项目组有多少人?项目组(开发,测试,产品)
20~~30个人左右一个项目组
开发:15 (前端开发,后端开发 正常:1:5或1:6)
测试:4 (一般:测试和开发的比例:1比5;或1 比6)一个测试经理(不干活),3个测试
产品: 1
============================================
用例数据:(功能)
每人每天写用例的数量:30-100多条
平均量是70-80条之间:前期写的多(可能70-120多条),后期写的少(可能30-70条)
4个人3个干活,写了7天,每天每人平均量80;
一个人写:1乘以3乘以80=560(条)
三个人一共写:3乘以560=1680(条)
公共用例去重复:一般我的规则8折,9折,
总用例数:1680乘以0.8=1344 (讲用例总数,说一个大概的数据,不要太精确)
比如:我测试借款,你测试投资,都要注册和登录的用例,
===============================================
执行用例数据:(呈一个递减的模式)
1天的执行用例平均数也是70-120条左右
总共执行9天(5,3,1)
sit1:一天的平均执行用例数:1344/3/5=89.6(条)
sit2:70乘以3乘以3=630
sit3:70乘以3乘以1=210
除非还有新增的用例
bug数:
bug数的比例是:
30:1 ,40:1 ,50:1 ,60:1
例如:
总用例:1344条 bug :50条 (30:1) 23条(60:1)
开发的质量决定:
(1)开发质量差,bug数多
(2)开发质量好, bug数少
(3)新项目bug数多;
(4)老项目相当bug数少
===============================================
练习:
3月的项目
3个测试,