拥有响应式网站有没有学做零食的网站
目录
- 1.lxml安装
- 2.Beautiful Soup安装
- 3.pyquery 的安装
我创建了一个社区,欢迎大家一起学习交流。社区名称:Spider学习交流
注:该系列教程已经默认用户安装了Pycharm和Anaconda,未安装的可以参考我之前的博客有将如何安装。同时默认用户掌握了Python基础语法。
抓取网页代码之后,接着是从网页中提取信息,提取信息的方式有很多,可以使用正则来提取 ,但是写起来相对比较烦琐 。
在这用这些强大的解析库进行处理,,如 lxml、Beautiful Soup、pyquery等。
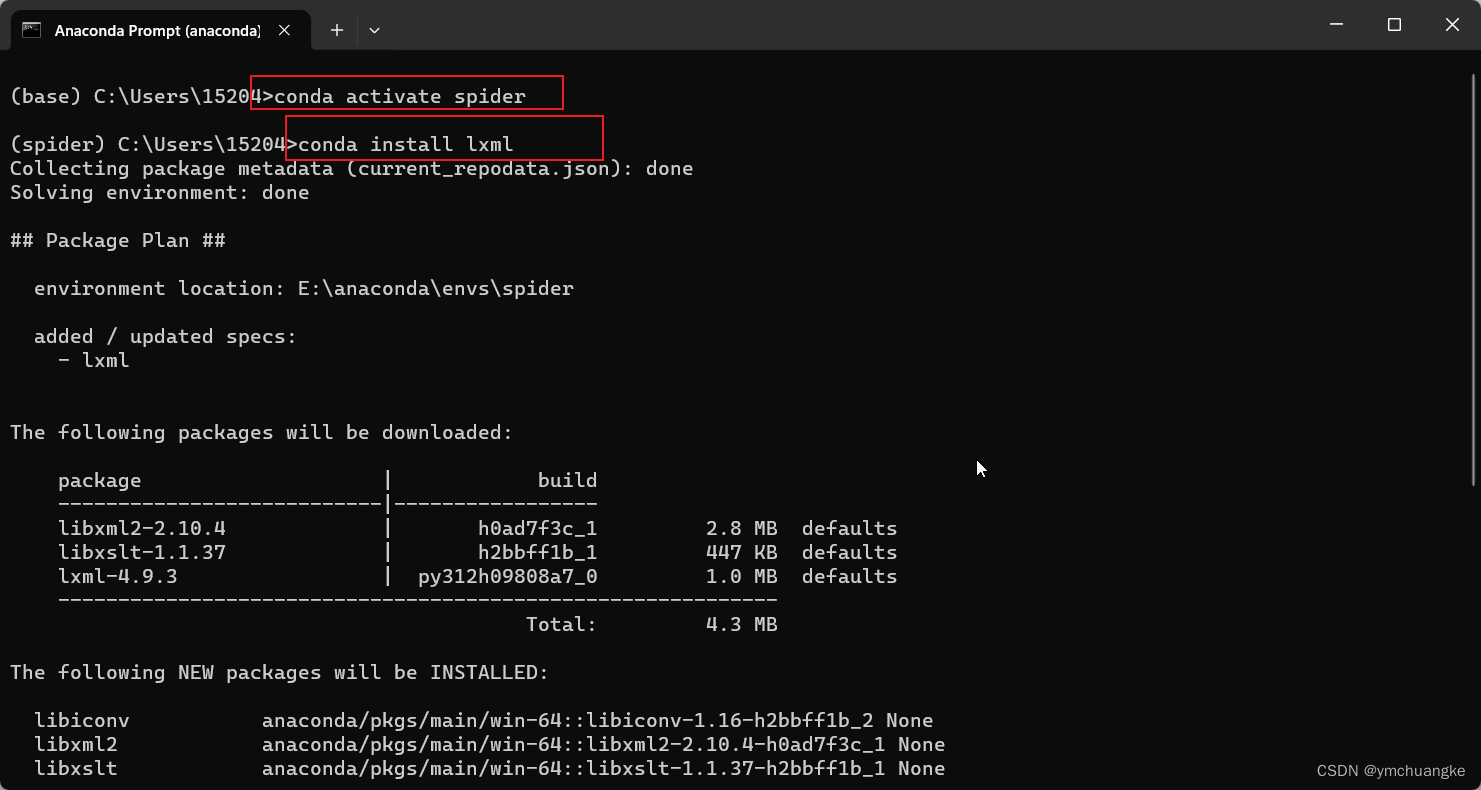
1.lxml安装
lxml是Python一个解析库,支持 HTML和XML解析,支持 XPath 解析方式,而且解析效率高。
#1.打开anaconda prompt
#2.激活前面创建的conda虚拟环境
conda activate spider
#3.输入下述代码进行安装
conda install lxml#验证是否安装成功
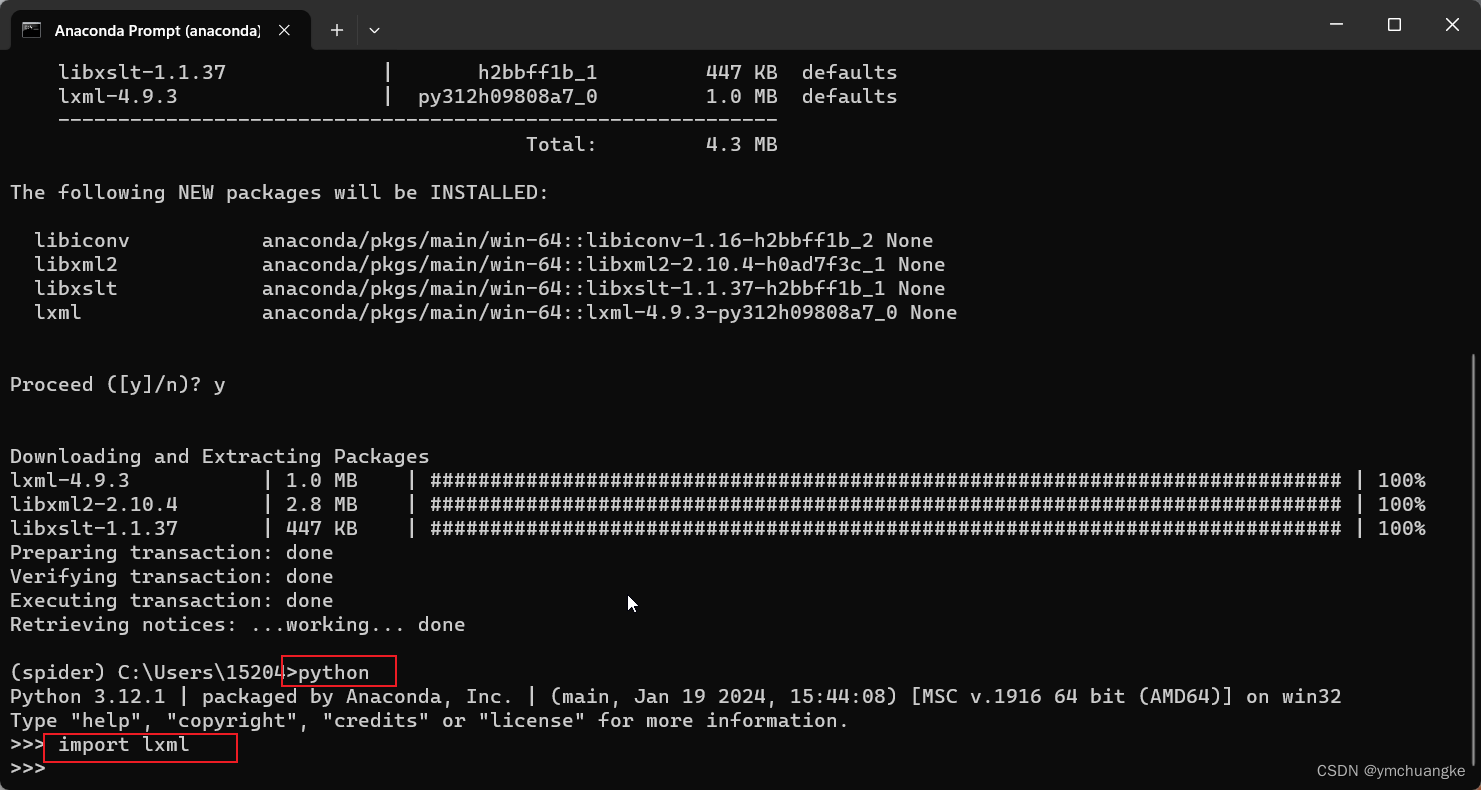
#4.输入
python
#5.导入该包
import lxml
1.安装界面
2.验证是否成功安装
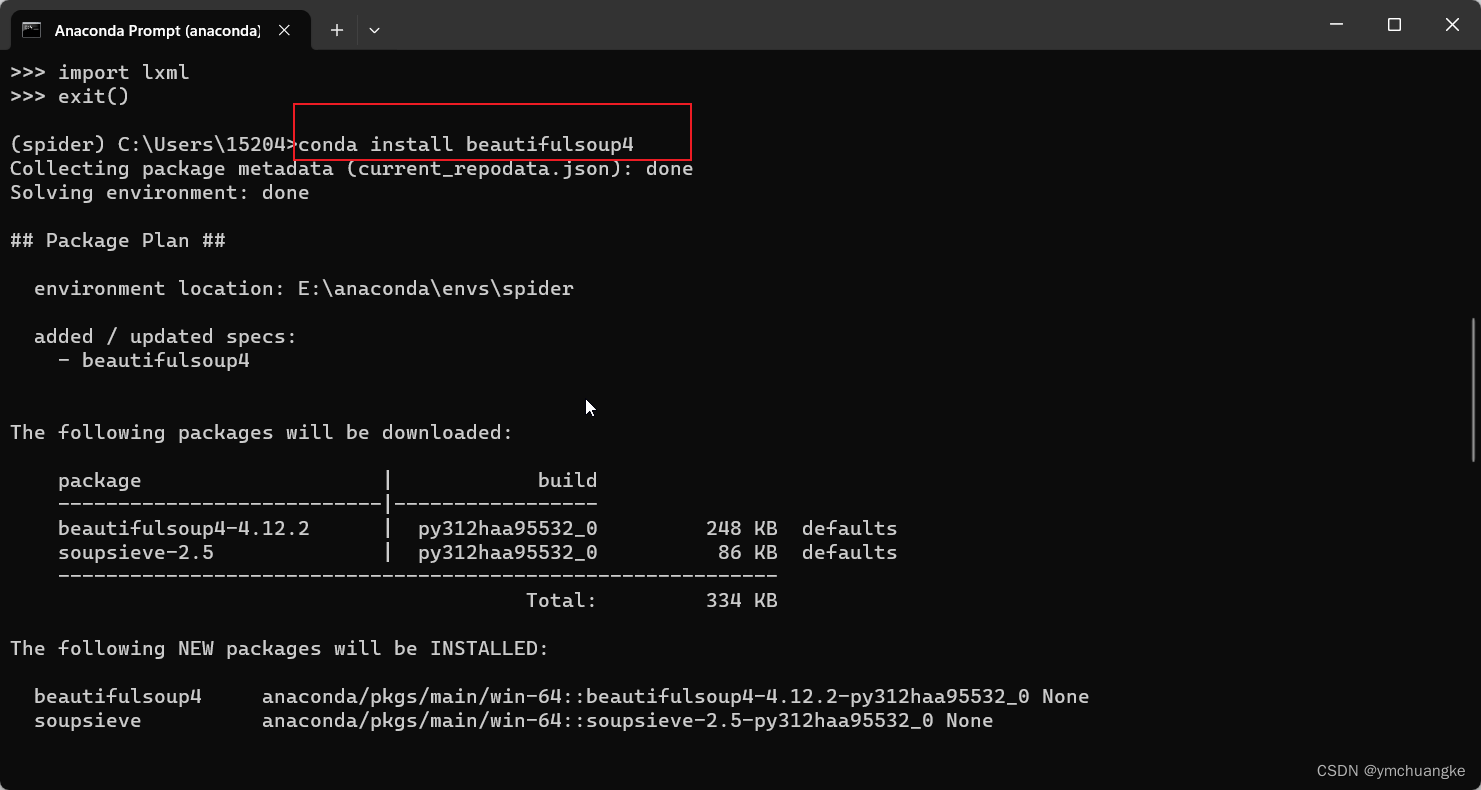
2.Beautiful Soup安装
Beautiful Soup是Python的HTML和XML的解析库,它拥有强大的 API和多样的解析方式。
安装方法同上。
给大家放个网址,大家可以自己查看。
Beautiful Soup 4.12.0
大家可以进去网址可以知道3已经停止开发,因此我们安装4.
大家有时间,可以学学HTML(CSS+javascript)很有帮助,主要好理解。
#1.打开anaconda prompt
#2.激活前面创建的conda虚拟环境
conda activate spider
#3.输入下述代码进行安装
conda install beautifulsoup4#验证是否安装成功
#4.输入
python
#5.导入该包
from bs4 import BeautifulSoup
soup = BeautifulSoup('<p>Hello World!<p/>','lxml')
print(soup.p.string)
1.安装界面
2.验证

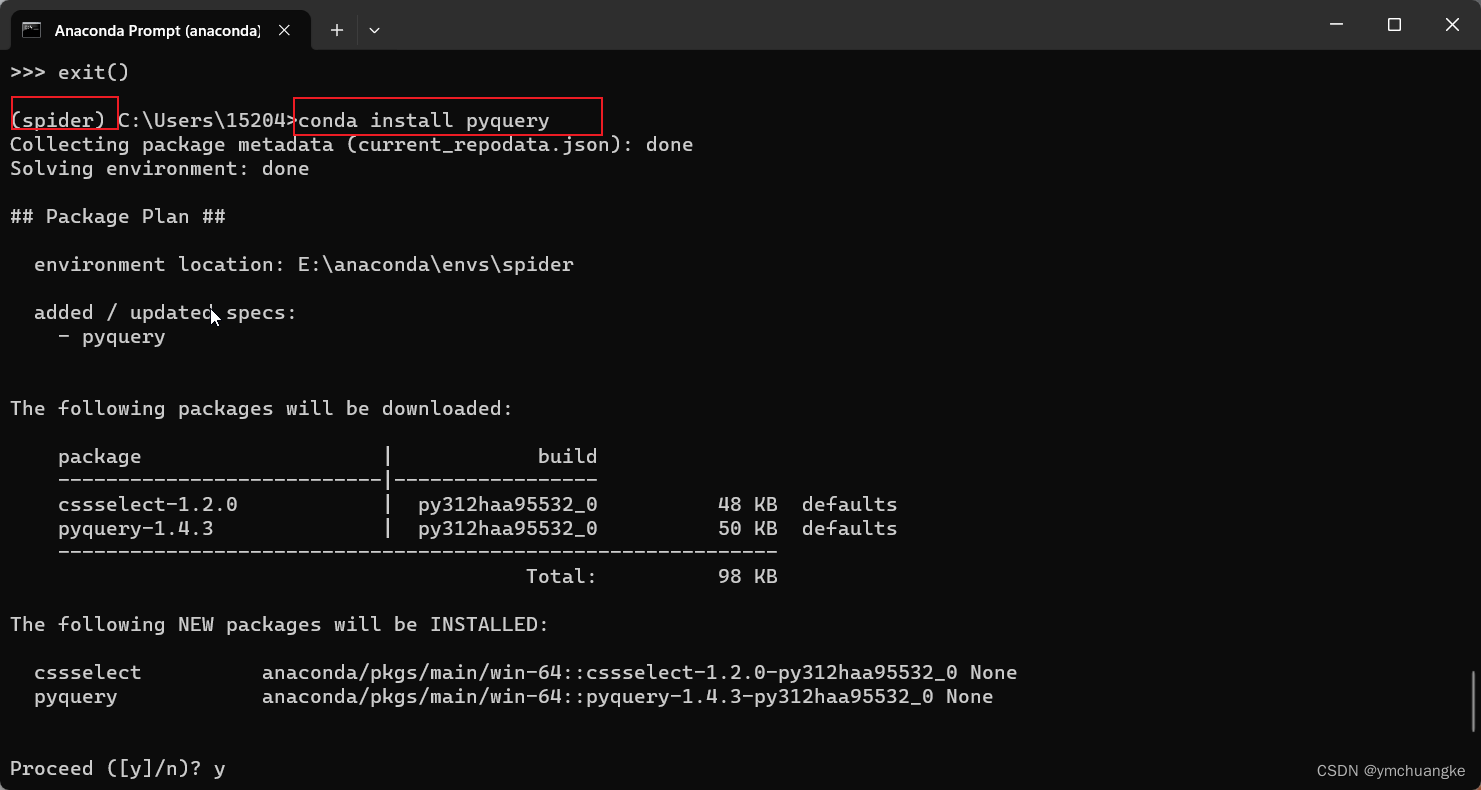
3.pyquery 的安装
pyquery是个很强大的网页解析工具,它提供了和 jQuery 类似的语法来解析HTML 文梢,支持css 择器。
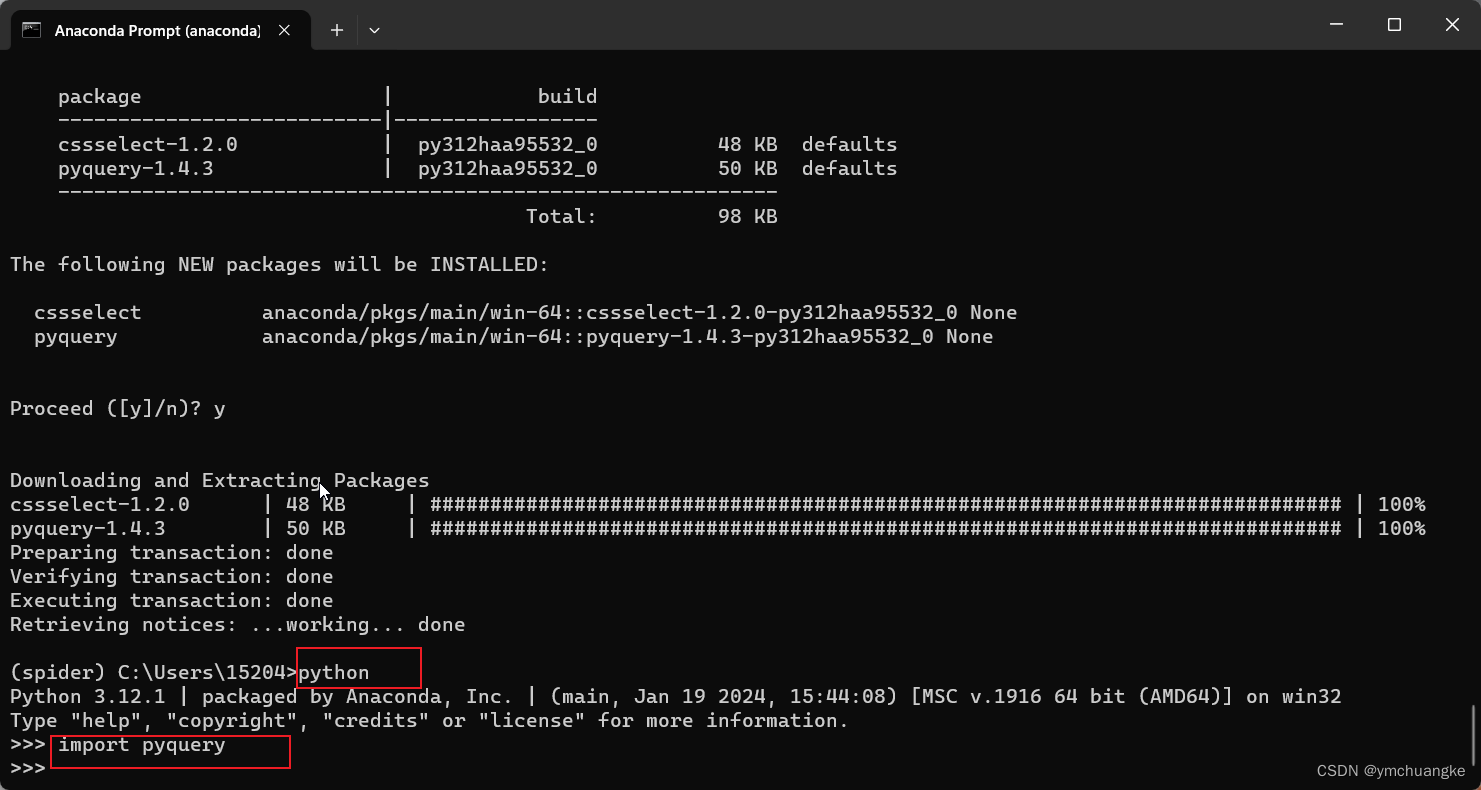
#1.打开anaconda prompt
#2.激活前面创建的conda虚拟环境
conda activate spider
#3.输入下述代码进行安装
conda install pyquery
#验证是否安装成功
#4.输入
python
#5.导入该包
import pyquery
1.安装
2.验证是否成功安装,如下图无报错,即成功安装