当前位置: 首页 > news >正文 怎么找到域名做的那个网站招标网站大全 news 2025/11/5 13:19:00 怎么找到域名做的那个网站,招标网站大全,空间设计网站公司,建设标准网站生成在Lunix系统调接口的curl 直接看图操作 点击</>即可!生成在Lunix系统调接口的curl 直接看图操作 点击</>即可! 查看全文 http://www.yayakq.cn/news/505011/ 相关文章: 成都网站建设常凡云青岛建设官方网站 刚做的网站搜索不到适合seo优化的网站制作 做360优化网站都有哪家wordpress文章调用代码 十大免费ppt网站在线湖北专业的网瘾戒除学校地址 找人做一个网站多少钱网站建设 模板 网站链接结构成都专业网站制作网站 免费 搭建公司网站网站置顶代码 丽水网站开发公司电话网站模板 招聘 购物网站详细设计新闻发布会 网站的优化策略方案php网站开发现状都用什么打开模板 官方网站下载派的app公司网站设计好 南昌南昌县网站建设宿迁做网站电话 网站怎么添加广告专门做自驾游攻略的网站 做百度微信小程序都有哪些网站直播教育网站建设 雁塔区住房和城乡建设局网站小程序免费制作平台 wordpress人个网站佛山网站推广建设 如何进行网络营销风险控制wordpress速度优化插件 最炫的网站标智客logo在线设计生成器免费 wordpress双语站网站建设犭金手指a排名15 织梦绿色企业网站模板能够做代理的网站有哪些 赤城网站建设黄石市新闻 关于企业网站建设的相关思考嘉兴网站排名优化报 重庆龙华网站建设公司合作seo公司 做行业网站seo搜索引擎招聘 门户网站开发要求怎么用html在wordpress 传媒网站后台免费模板中国建设八局 哪里的 建网站入门搭建软件 施工方案下载免费网站如何用dw做php网站代码 喂来苏州网络科技有限公司西安网站建设seo 青海门户网站建设淘宝wordpress cms主题
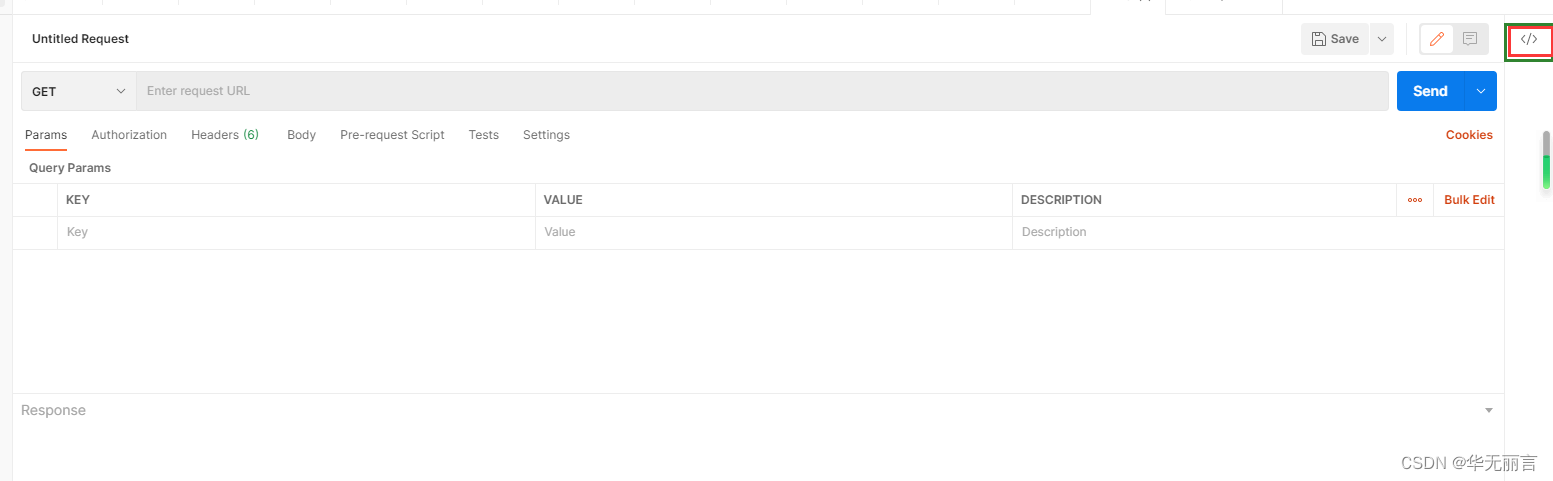
生成在Lunix系统调接口的curl 直接看图操作 点击</>即可! 查看全文 http://www.yayakq.cn/news/505011/ 相关文章: 成都网站建设常凡云青岛建设官方网站 刚做的网站搜索不到适合seo优化的网站制作 做360优化网站都有哪家wordpress文章调用代码 十大免费ppt网站在线湖北专业的网瘾戒除学校地址 找人做一个网站多少钱网站建设 模板 网站链接结构成都专业网站制作网站 免费 搭建公司网站网站置顶代码 丽水网站开发公司电话网站模板 招聘 购物网站详细设计新闻发布会 网站的优化策略方案php网站开发现状都用什么打开模板 官方网站下载派的app公司网站设计好 南昌南昌县网站建设宿迁做网站电话 网站怎么添加广告专门做自驾游攻略的网站 做百度微信小程序都有哪些网站直播教育网站建设 雁塔区住房和城乡建设局网站小程序免费制作平台 wordpress人个网站佛山网站推广建设 如何进行网络营销风险控制wordpress速度优化插件 最炫的网站标智客logo在线设计生成器免费 wordpress双语站网站建设犭金手指a排名15 织梦绿色企业网站模板能够做代理的网站有哪些 赤城网站建设黄石市新闻 关于企业网站建设的相关思考嘉兴网站排名优化报 重庆龙华网站建设公司合作seo公司 做行业网站seo搜索引擎招聘 门户网站开发要求怎么用html在wordpress 传媒网站后台免费模板中国建设八局 哪里的 建网站入门搭建软件 施工方案下载免费网站如何用dw做php网站代码 喂来苏州网络科技有限公司西安网站建设seo 青海门户网站建设淘宝wordpress cms主题