石岩附近网站建设公司企业网站seo教程
Docker安装rabbitmq
个人觉得像rabbitmq之类的基础设施在线上环境直接物理机安装使用可能会好些。但是在开发测试环境用docker容器还是比较方便的。这里学习下docker安装rabbitmq使用。
1. rabbitmq 镜像库地址
rabbitmq 镜像库地址:https://hub.docker.com/_/rabbitmq/tags
这里是官方镜像库,可以在这挑选需要的版本的rabbitmq镜像。
2. 拉取 rabbitmq 镜像
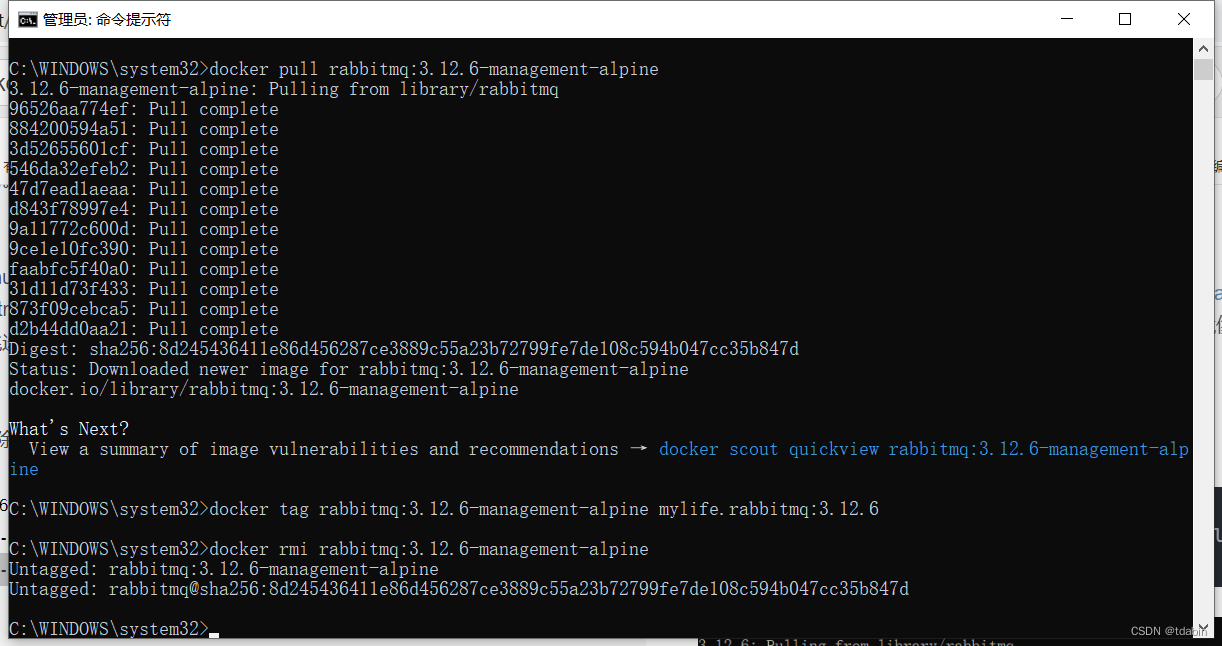
- 拉取镜像、重命名镜像名并删除原镜像名
docker pull rabbitmq:3.12.6-management-alpinedocker tag rabbitmq:3.12.6-management-alpine mylife.rabbitmq:3.12.6docker rmi rabbitmq:3.12.6-management-alpine
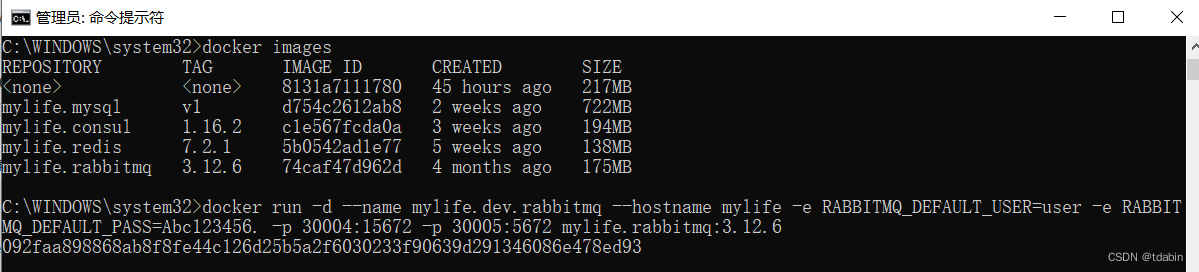
- 运行容器
docker run -d --name mylife.dev.rabbitmq --hostname mylife -e RABBITMQ_DEFAULT_USER=user -e RABBITMQ_DEFAULT_PASS=Abc123456. -p 30004:15672 -p 30005:5672 mylife.rabbitmq:3.12.6
尝试登陆管理页面成功