美轮美奂的网站建设网站网站做庄是怎样做
一提到毛发插件,我们一般想起的就是maya的 xgrn 或者max的ox。但是这些都是我们做影视级数字人用的。比较费性能也比较费面
下面分享一个干货 Hair cards tool
这个插件操作不像xgen与ox那么复杂。基本上0基础上手5分钟不到。就能插片出不错的效果。比较适用于,做小程序开发。APP手游。优化性能,模型需要控制面数的同行。
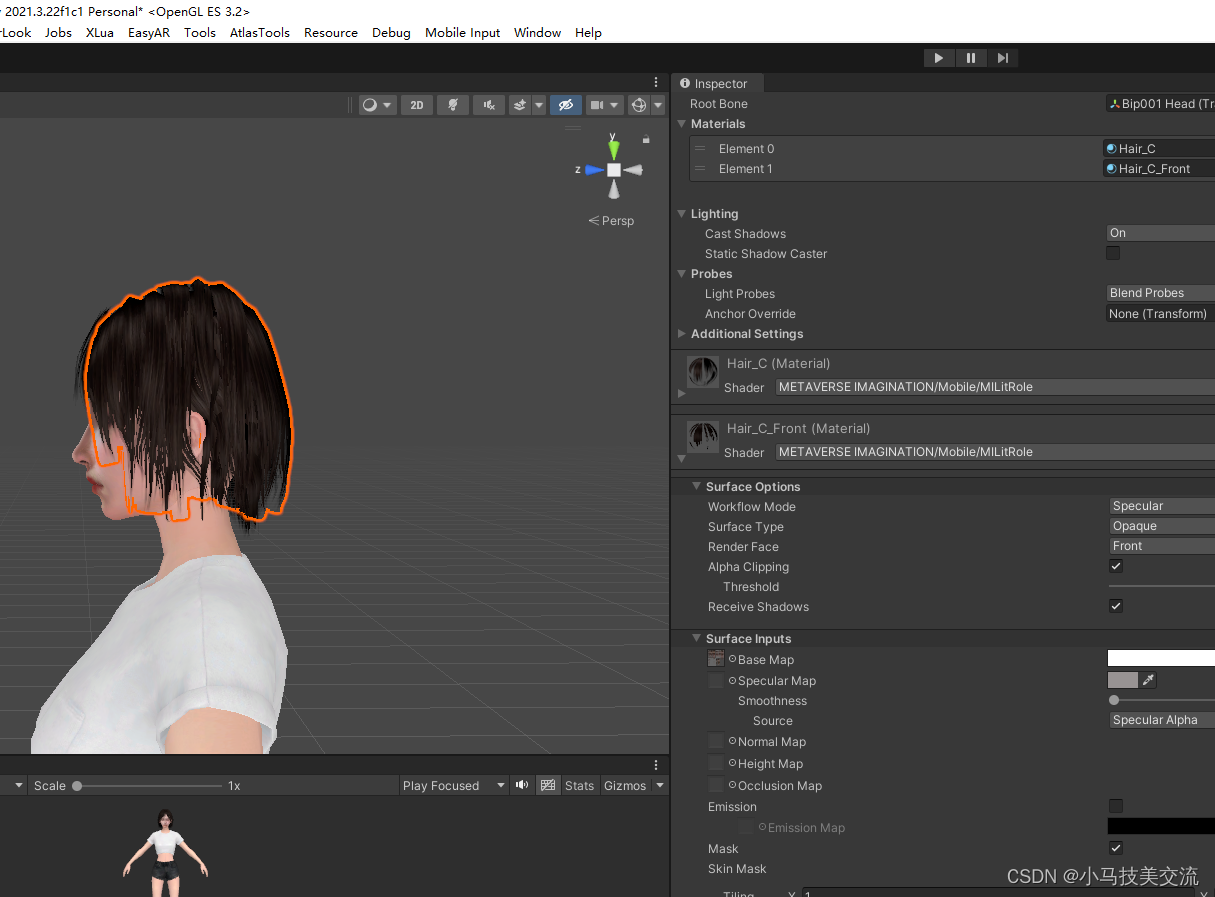
下面先上一下效果,这个头发2000面左右。unity截图效果,没有专门写shader,用的URP管线基础lit材质。

下面上使用教程
链接:https://pan.baidu.com/s/1jbGx8baa2K1EgI_EE7oF1w
提取码:tfy5
1网盘上取到插件,下载(如果过期了可以私信我拿新包)

2将文件脚本直接丢到max中,根据安装文件提示运行即可

3安装完成之后,你会得到这样一个脚本面板(之后的操作都在这个面板操作即可)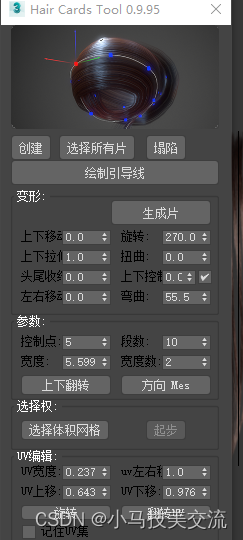
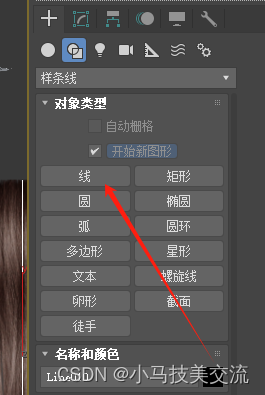
我们先创建一个引导线,选中引导线,点击生成片
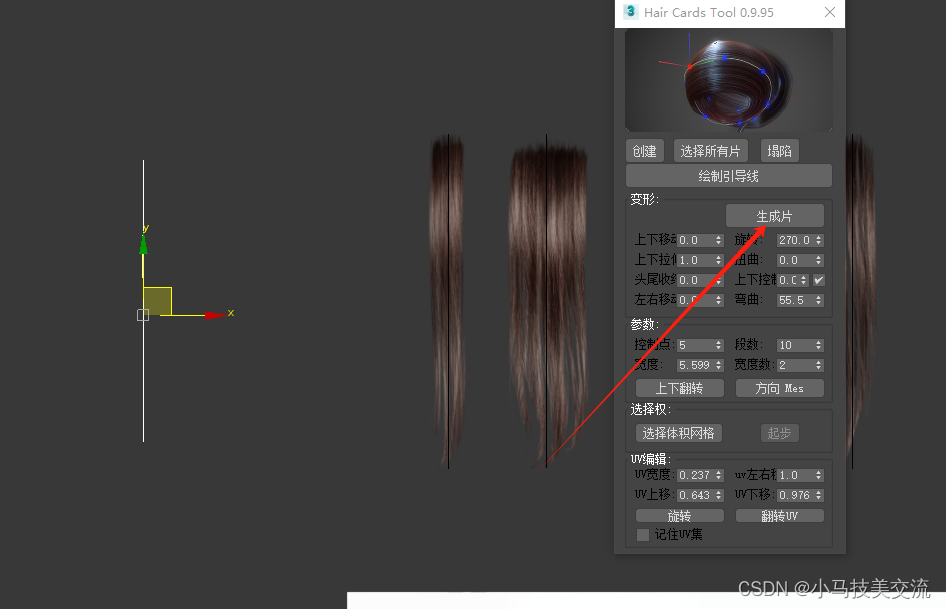
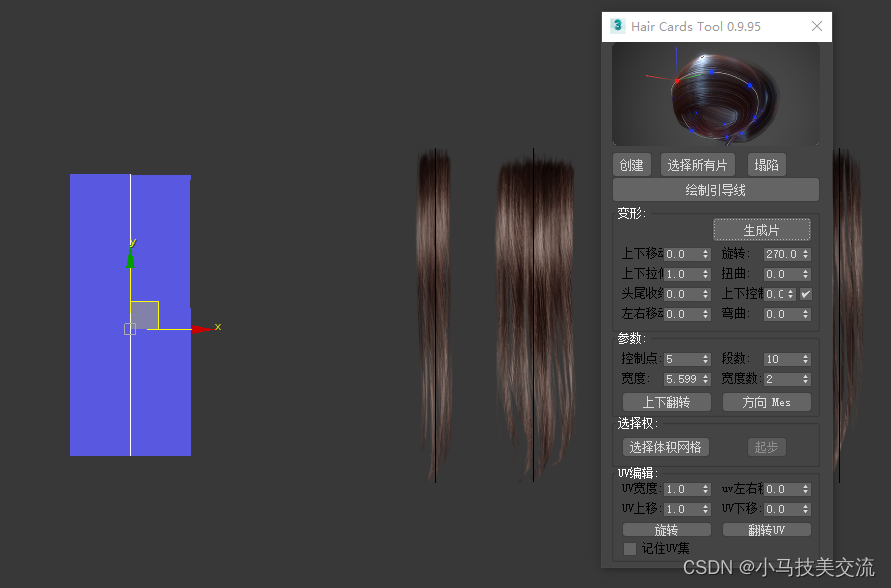
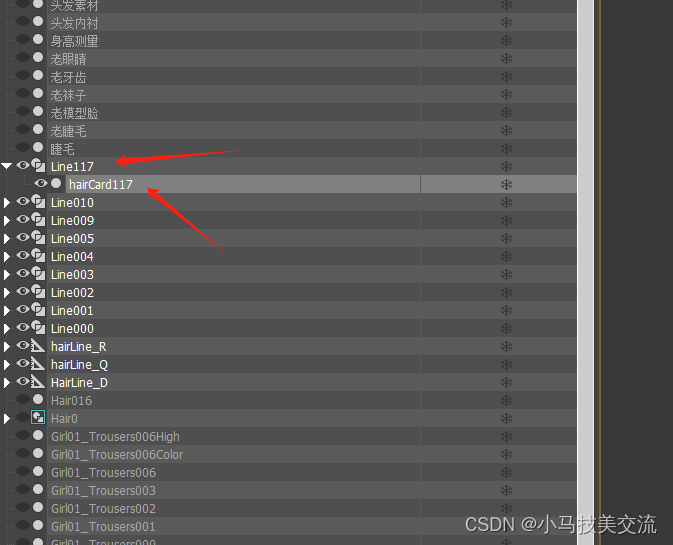
你会得到一个跟引导线绑定的面片,把面片链接到引导线上,引导线是父对象,片是子对象。
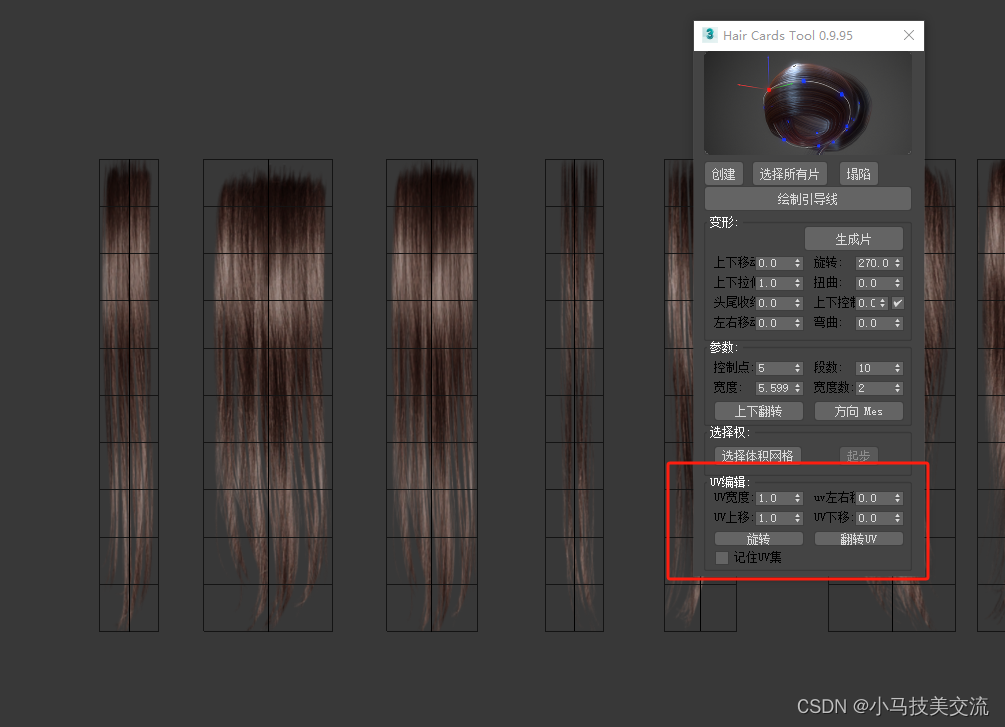
4随便找一张你准备好的头发贴图,扔给这个面片,通过调整编辑器上的UV得到满意的头发簇(注意一定要用编辑器提供的uv参数去调整,因为编辑器中是根据你发跟计算UV拉伸,不然后面我们根据发型样式拉伸头发的时候会出现变形)

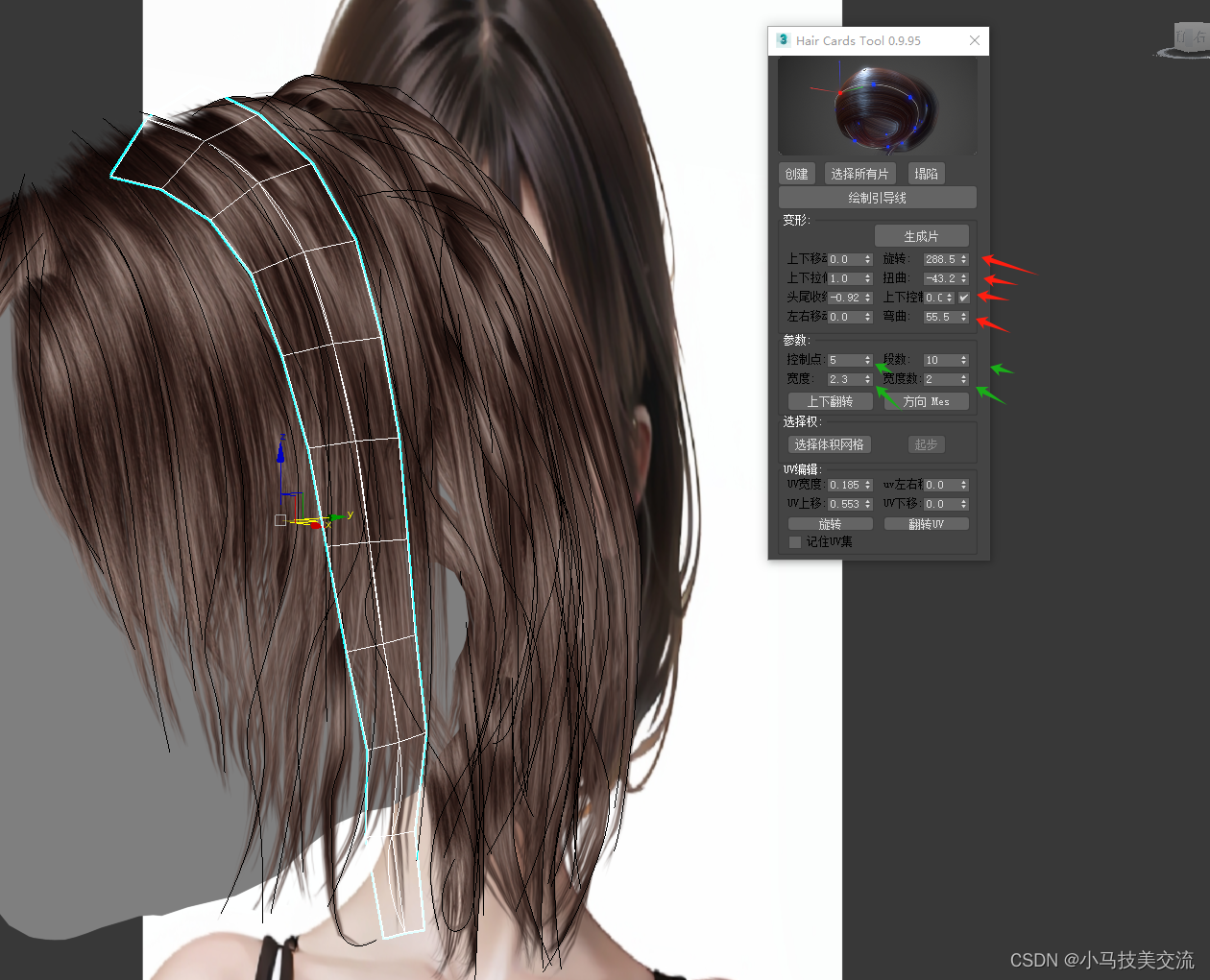
5 制作好几个不同的头发片之后,就可以把这些头发移动到你的模型上,先调节引导线的点,拉出你满意的头发长度,弯曲度。之后用红色部分调节头发片的形体,样式、长短等。绿色部分控制你引导线上的片模型面数,点数等。
6剩下就是小伙伴们自由发挥的时间,祝你们都能做出自己喜欢的发型。基本上一个这样的短发女孩,30分钟左右,就可以做好发型。